10. Témák haladóknak¶
10.1. Oktató üzemmód konfigurálása¶
Deviation használható oktató (master) vagy tanuló (slave) távirányítóként is két távirányítós konfigurációban. Ilyenkor az oktató és a tanuló távirányítóinak DSC csatlakozóit összekötik egy oktató kábellel. Igazából csak az oktató távirányítója kommunikál a modellel, de az oktató egy kapcsolóval átengedheti a vezérlést a tanulónak. Amikor a kapcsoló be van kapcsolva, a tanuló távirányítója az oktató kábelen keresztül elküldi a bemeneti adatokat (botkormány) az oktató távirányítójának, és az ezeket a bemeneti adatokat fogja használni az oktatóé helyett.
Deviation együtt tud működni gyakorlatilag bármilyen távirányítóval, ami akár oktató, akár tanuló módban képes üzemelni. Ahhoz, hogy Deviation-t illeszteni tudjuk más gyártó távirányítóihoz, ismerni kell a csatlakoztatott távirányító PPM paramétereit, és megfelelően be kell állítani a közép impulzus hosszát, és az impulzus kitérés mértékét, továbbá tudni kell, hogy hány csatorna kerül átadásra, valamint ismerni kell azok sorrendjét. Ezeket az információkat legegyszerűbben a www.deviationtx.com oldalon található fórumban lehet megtudni.
10.1.1. Oktató mód - Master¶
Az oktató módot a „PPM be” kiválasztó doboz „Csatorna” vagy „Bot” értékével lehet beállítani a Modell konfigurálás (Szokásos és Haladó GUI) fejezet alapján. A kiválasztott „Csatorna” vagy „Bot” érték esetén az „ENT” nyomógomb megnyomására megnyílik az oktató konfiguráció képernyő. A 2 mód kicsit eltérően viselkedik:
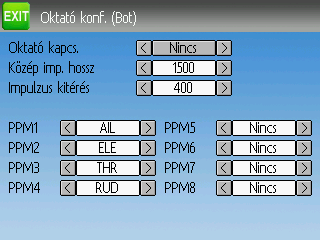
Bot: A bot módban minden bemeneti csatorna meg lesz feleltetve az oktató távirányító egy-egy botkormányának. Ebben a módban, ha a tanuló mozdít valamelyik botkormányon, az pont ugyanúgy fog viselkedni, mint ha az oktató mozgatta volna az adott botkormányt. Általában elmondható, hogy ilyenkor a tanuló távirányítója egy az egyben továbbítja a botok pozícióit (mindenféle mixelés nélkül), és az oktató távirányítója végzi el az összes szükséges mixelést.
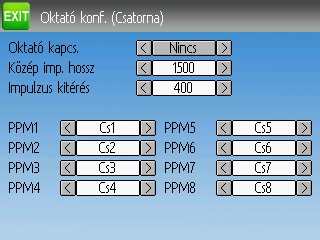
Csatorna: A csatorna módban minden bemeneti csatorna meg lesz feleltetve az oktató távirányítójának egy-egy kimeneti csatornájának. Ebben a módban a tanuló távirányítójának kell gondoskodni a modell irányításához szükséges mixelésekről. Gondosan ügyelni kell rá, hogy az oktató és a tanuló konfigurációja teljesen megegyezzen, egyébként a modell furcsán viselkedhet az oktató és tanuló közötti váltásokkor.
Az alábbi opciókat lehet konfigurálni mindkét oktató konfigurációs képernyőn:
- Közép impulzus hossz: Megadja a tanuló távirányítója által kiadott, közép szervó álláshoz tartozó impulzus hosszát (µs). Ha ez az érték nem egyezik a tanuló távirányítója által ténylegesen kiadott impulzus hosszal, akkor a szervók alapból nem középen fognak állni.
- Impulzus kitérés: Megadja a tanuló távirányítója által kiadott, a maximális szervó kitéréshez tartozó impulzus szélességét (a közép állástól mérve). Ha ez az érték nem megfelelő, akkor a szervók esetleg nem érik el a maximális kitérésüket (vagy túlságosan is kitérnek).
- Oktató kapcsoló: Megadja, hogy mely kapcsolóval lehet átadni az irányítást a tanulónak.
- PPM1…PPM8: Meghatározza a tanuló és az oktató távirányítója közötti (akár csatorna, akár bemenet) megfeleltetést.
10.1.2. Tanuló mód - Slave¶
A tanuló módot a „PPM” protokoll kiválasztásával lehet beállítani a Modell konfigurálás (Szokásos és Haladó GUI) fejezetben leírtak szerint. Ilyenkor a protokoll kiválasztó dobozon állva az „ENT” nyomógomb megnyomására megnyílik a PPM kimenet konfiguráló képernyője, a konfiguráláshoz lásd a USBHID protokoll fejezetben leírtakat. A Deviation ilyenkor a kimeneti csatornák értékeit PPM formában küldi ki a DSC csatlakozóra. Ha a Deviation tanuló távirányítót egy „Bot” módban (lásd fent) konfigurált Deviation oktató távirányítóval használod, akkor a tanuló távirányítón semmilyen mixelést nem érdemes beállítani.
10.2. FPV és egyéb külső bemenetek konfigurálása¶
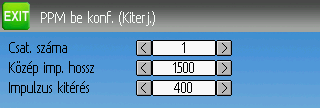
A Deviation képes egy külső eszközről (mint pl. egy FPV head tracker) beérkező PPM jeleket fogadni és felhasználni. Ennek konfigurálásához a „PPM be” kiválasztó dobozban a „Kiterjesztett” opciót kell kiválasztani, a Modell konfigurálás (Szokásos és Haladó GUI) fejezetnek megfelelően.
A kiválasztás után az „ENT” nyomógomb megnyomásával lehet a plusz bemeneteket konfigurálni.
A konfigurálható opciók a következők:
- Közép impulzus hossz: Megadja a középállású bemenethez tartozó impulzus hosszát (µs).
- Impulzus kitérés: Megadja a minimális/maximális szervó kitéréshez tartozó impulzus szélesség eltérést (a közép állástól mérve).
- Csatornák száma: Megadja a fogadott bemeneti csatornák számát (általában max. 8 csatorna lehetséges).
10.3. Trim használata virtuális kapcsolóként¶
A Deviation képes, a fizikai kapcsolók mellett, a trim gombokat használni virtulális kapcsolókként, de ez a lehetőség csak a haladó felületen érhető el. 3 féle kapcsolót tudunk a trim gombokkal szimulálni:
- Pillanat kapcsoló: A kapcsoló csak addig lesz aktív, amíg a trim gombot nyomva tartjuk.
- Kapcsoló: A trim gomb megnyomására a kapcsoló állapota be- vagy kikapcsol, mindig az ellenkező állásba.
- Ki/Be: A Trim+ gomb bekapcsolja, a Trim- gomb pedig kikapcsolja a kapcsolót.
- 3 állású: A kapcsoló egyik irányban aktív lesz mindaddig, amíg a Trim+ gomb meg van nyomva, és a másik irányba, amíg a Trim- gomb meg van nyomva, majd visszaáll középre, ha elengedik.
A virtuális kapcsoló létrehozásához először válassz ki egy trim-et a „Trim” képernyőn, és nyisd meg a konfiguráló képernyőt. Lásd Trim-ek és virtuális bemenetek (Szokásos és Haladó GUI).
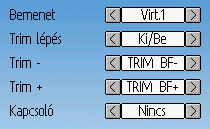
Utána állítsd a „Trim lépés” mezőt „Pillanat kapcsoló”, „Kapcsoló”, „Ki/Be”, vagy „3 állású” értékűre. Ezt a „Trim lépés” kiválasztó doboz bal oldali nyilával érheted el, ha a 0.1 érték alatt. Utána add meg a „Bemenet” mezőben a kapcsolóként felhasznált virtuális csatornát (példánkban ez legyen a Virt1).
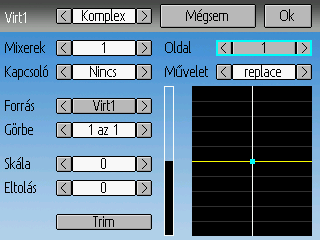
Most menj a „Mixer” képernyőre, és nyisd meg az adott virtuális csatorna (példánkban a Virt1) konfigurációját.
A mixer típust állítsd „Komplex”-re, állítsd a „Forrás”-t az adott virtuális csatormára (Virt1), állítsd a görbét „1 az 1”-re (NE használd a „Fix”-et), álítsd a skálát „0”-ra, és végül engedélyezd a „Trim” gombot.
Most már használhatod a virtuális csatornát (Virt1), mint bármely más kapcsoló bemenetet. Amikor a virtuális kapcsoló aktív, a virtuális csatorna értéke 100 lesz, egyébként az értéke -100 lesz. „3 állású” esetén a virtuális csatorna értéke -100 lesz az egyik irányban és +100 a másikban, egyébként elengedve az értéke 0 lesz.
MEGJEGYZÉS: Ha egy mixerben a virtuális kapcsolóként beállított virtuális csatornát forrásként használod (nem pedig kapcsolóként), akkor tiltsd le az adott lapon a „Nincs Trim” gombbal, különben az adott trim érték duplán lesz hozzáadva.
10.4. Imbolygó beállítások¶
Az imbolygó tárcsa az RC helikopterek irányítására szolgál, ez szabályozza a főrotor forgási síkját, és a rotorlapátok állásszögét. Az imbolygó tárcsa normál esetben 3 szervóhoz csatlakozik a magassági kormány, a csűrés, és kollektív állásszög vezérléséhez, de a működése miatt nem egy az egyes a megfeleltetés az egyes botkormányok és a szervók mozgása között. E helyett a kollektív, a magasság és a csűrő egyfajta mixelése szükséges az imbolygó tárcsa szervóinak vezérléséhez. Ezt a mixelést ciklikus kollektív állásszög mixelésnek (Cyclic Collective Pitch Mixing - CCPM) hívjuk.
Régebben az RC helikopterek kisegítő lapátokat, úgynevezett flybar-okat használtak a főrotor fölött vagy alatt, melyek összekötőkkel csatlakoztattak hozzá a stabilitás növelése érdekében. Ilyenkor a távirányító végezte el a szervók vezérléséhez szükséges jelek mixelését, és így direktben vezérelte az imbolygó tárcsa 3 szervóját. Ez a konfiguráció manuális-CCPM (mCCPM) néven ismert. A másik megoldás egy elektronikus mixer használata a helikopteren, amely akár a vevő részeként, vagy külön a vevő és a szervók között is lehet, és ami elvégzi a szükséges mixelést. Az a konfiguráció az elektronikus CCPM (eCCPM), és ebben az esetben a távirányító direktben a botkormány bemenetek jeleit küldi, és az elektronikus mixer fogja átalakítani azokat a megfelelő imbolygó szervó jelekké.
Újabban a flybar nélküli (flybarless - FBL) helikopterek terjedtek el, főleg a mikró méret tartományban. Ezek a helikopterek eCCPM rendszert használnak egy elektronikus giroszkóppal együtt, így folyamatosan stabilizálni tudják a repülést fizikai flybar nélkül. Ez a felépítés olcsóbban előállítható, egyszerűbben szervizelhető, ráadásul nagyobb stabilitást és pontosabb irányítást tesz lehetővé.
A Deviation többféle imbolygó tárcsa szervó elrendezést támogat, mint pl. a 120°, 120° fordított, 140°, 90°, és a mixelés nélküli, melyek így néznek ki:
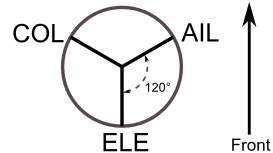
120 (3 szervó): A szervók az imbolygó tárcsa körül 120°-os szögben helyezkednek el. A csűrés bot hatására a csűrés és a kollektív szervók döntik az imbolygót jobbra és balra; a magassági bot mindhárom szervót mozgatva dönti az imbolygót előre és hátra; míg a kollektív bot mindhárom szervót egy irányba mozgatva emeli és süllyeszti az imbolygót. Az összhangban működő szervók drasztikusan megnövelik a rendelkezésre álló nyomatékot, valamint a precizitást.
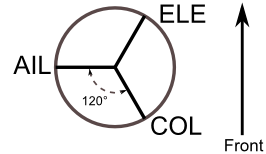
120X (3 szervó): Ugyan az, mint a fenti, csak az elrendezés el van forgatva 150°-kal. A csűrés bot mindhárom szervót mozgatva dönti az imbolygót jobbra és balra; a magassági bot hatására a magassági és a kollektív szervók döntik az imbolygót előre és hátra; míg a kollektív bot mindhárom szervót egy irányba mozgatva emeli és süllyeszti az imbolygót.
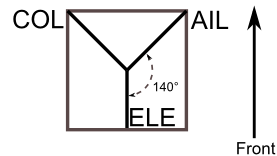
140 (3 szervó): Tulajdonképpen a 140°-os imbolygó elrendezés szervói ugyanúgy működnek, mint a 120°-osé, csak a magassági vezérlés elrendezése tér el. A 140°-os elrendezés simább működést tesz lehetővé, minden irányban egyforma ciklikus sebességgel. A 120°-os elrendezésben a bal/jobb döntés kicsit gyorsabb, mint az előre/hátra.
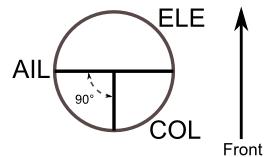
90 (3 szervó): A csűrés bot hatására a csűrés és a kollektív szervók döntik az imbolygót jobbra és balra; a magassági bot előre és hátra dönti az imbolygót; míg a kollektív bot mindhárom szervót egy irányba mozgatva emeli és süllyeszti az imbolygót. Ez a leggyakoribb elrendezés az elektronikus helikoptereken.
Nincs: Ebben a speciális esetben a mixelést a helikopter saját repülésirányító rendszere végzi. A kimenetek konfigurálásához annak gyártója által kiadott utasításokat kell követni.
MEGJEGYZÉS: Néhány helikopter 120 vagy 140 fokos elrendezéssel rendelkezik, de azok el vannak forgatva 180 fokkal. Ebben az esetben használhatod a 120 vagy 140 fokos elrendezést, de lehet, hogy egyes csatornákat invertálnod kell.
10.5. Hangok módosítása¶
Át lehet szerkeszteni a távirányító által kiadott hangjelzéseket, de ehhez csatlakoztatni kell a távirányítót a PC-hez USB meghajtóként, és át kell írni a „media” könyvtárban található „sound.ini” fájl tartalmát.
A fájlban található szekciók egy-egy hangot írnak le, és az alábbi események váltják ki őket:
- startup: Bekapcsolás.
- shutdown: Kikapcsolás.
- volume: A távirányító hangerejének változtatása.
- timer_warning: Az időzítő le fog járni.
- alarm#: Időzítő # (1…4) lejárt.
- batt_alarm: Alacsony telepfeszültség riasztás.
- done_binding: A párosítás befejeződött.
- key_pressing: Gombnyomás hangja.
- saving: A modell fájl mentésekor.
- max_len: Ha meghaladtad a maximálisan beírható szöveg hosszát.
- telem_alarm#: Telemetria riasztás # (1…6).
Minden szekcióban beállíthatod az adott hangjelzés hangerejét a „volume” beállítással 0-tól (nincs hang) 100-ig (max. hangerő). A többi bejegyzés egy-egy hangjegy neve, a hozzájuk tartozó értékek pedig az adott hangjegy hossza milliszekundumban. Egy hangjelzés maximum 100 hangjegyből állhat.
A hangjegy neve lehet „xx”, ami a szünet (ilyenkor nem ad hangot), vagy a hangjegy neve (a…g), esetleg „x”-el jelölve a fél hang emelést „a”, „c”, „d”, „f” vagy „g” esetén, majd kiegészítve az adott oktáv számával 0-tól 4-ig. Így „c0”-tól (közép C) egészen „b4”-ig választhatók hangok.