
- Posts: 15
Stepping up to Collective Pitch
- vanwadiver
-
Topic Author
- Offline
Less
More
10 Apr 2014 01:35 #22295
by vanwadiver
Stepping up to Collective Pitch was created by vanwadiver
I’ve been playing around with a couple of ideas with the Deviation Configuration to assist in my transition from Fixed-Pitch to Collective-Pitch helicopters, and I’d like to relay my thoughts and experiments, and solicit some more knowledgeable opinions.
First some background into why I’m trundling down this path... As I make the transition to collective pitch, I’m struck by the now semi-married-at-the-hip concept of thrust (now potentially negative) being completely run and forced into dual-use onto the same stick.
Specifically contrasts in behavior are:
Fixed-Pitch
- Thrust is a function of motor speed, and there is no negative thrust.
- An “oops moment” can be mitigated by slamming the stick down and cutting motor speed.
Collective-Pitch
- Thrust is a function of motor speed and blade angle, and there can be negative thrust.
- “Oops moments” are probably exacerbated by slamming the stick down because the motor speed may be constant in alternate flight-modes, or at a minimum the sudden new blade angle may result in unwanted behavior.
- Binding blade angle to motor speed at startup doesn’t exactly lend itself to easy or natural flight characteristics... hence alternate flight-modes.
The progression of experiments with configurations I’ve been working with so far for flight-mode-0 include: “dumbing down” the throttle and pitch; “smartening up” the pitch; and “divorcing” the pitch from the throttle. For flight modes 1 and 2, the accepted wisdom indicates that the throttle is set to a fixed-ish level, and the stick is pretty much only controlling the blade angle. I say “fixed-ish” because some configurations call for increasing the motor speed at the pitch extremes... (consider a curve like 100,90,100 for flight-mode-2)
So here’s the scenarios I’ve mentioned above:
Dumbing down the throttle and pitch
- Setting the Throttle-Channel to a curve like: -5,-5,0,30,60
- This pretty much follows Fixed-Pitch performance, where the heli will sit nicely until the motor is spun up to “flight speed”, and then the collective will provide increasing thrust coincident with increasing motor speed.
- This does allow for some “reasonable” flight performance, but doesn’t really provide the CP experience and training I’m looking for. (I know, I know... I could set up FM1 to get that experience, but that’s not my objective with this discussion.)
Smartening up the pitch
- Create a new Virtual Channel to put the blade angle into “no dirt sucking” mode while the blade is being spun up, but allow for full range of motion (-60 thru +60) once the throttle has reached mid-stick.
- This configuration seems to work “reasonably well” in that the full range of blade angles are available in FM0, but the motor speed is still tied to the stick, and at negative blade angles the CP performance characteristics suffer dramatically.
- Configuration details:
-- Presume that the “Throttle Hold Safety” described in other discussions is implemented in Virtual Channel 1.
-- Create a “Collective Pitch Safety” for the CP Channel as:
[channel6]
safetysw=!Virt3
safetyval=-5
where:
[virtchan3]
name=CPsafe
template=complex
[mixer]
src=Virt3
dest=Virt3
[mixer]
src=Virt1
dest=Virt3
switch=Virt1
offset=-1
[mixer]
src=THR
dest=Virt3
switch=!Virt1
offset=-1
muxtype=max
- This configuration even provides functionality for auto-rotation (I think...)
So, now we come to the “divorce” part of the discussion... I’m struck by the any and varied ways of trying to combine both the throttle control and pitch control into the same “bound” physical device. It seems to me that the concept of “throttle” and “pitch” for a Collective-Pitch heli should not be combined onto the same stick. To that end, I’ve been looking for a way to safely spin up the throttle to flight level, provide for “oops” control, and not use the CP stick.
Divorce the pitch from the throttle
- Use the stick to only control the Collective-Pitch
- Slowly spin up the motor using the Rudder DR switch. (same hand as thrust in the past, somewhat maintaining “oops” muscle memory)
- The Rudder DR switch also acts as a “Throttle Hold Safety”
- Configuration details:
[channel1]
speed=250
template=complex
[mixer]
src=Ch1
dest=Ch1
switch=FMODE0
scalar=1
muxtype=add
curvetype=fixed
[mixer]
dest=Ch1
switch=FMODE0
scalar=50
muxtype=delay
curvetype=fixed
[mixer]
src=Ch1
dest=Ch1
switch=FMODE0
scalar=60
muxtype=min
curvetype=fixed
[mixer]
dest=Ch1
switch=FMODE1
scalar=75
curvetype=fixed
[mixer]
dest=Ch1
switch=FMODE2
scalar=90
curvetype=fixed
[mixer]
src=Ch1
dest=Ch1
switch=RUD DR0
scalar=-100
curvetype=fixed
- This configuration will slowly spin up the throttle to “flight speed” completely independent of the CP position of the stick.
So, that’s what I’ve done. My questions to the group are: Am I completely wasting my time in pondering these alternatives? Is there any value in either of my alternatives, and are they worth pursuing? And finally, Is there a better or recommended way to approach the issue?
Your indulgence in my ramblings is appreciated, and I appreciate any response or insights you might provide...
Thanks,
Paul
First some background into why I’m trundling down this path... As I make the transition to collective pitch, I’m struck by the now semi-married-at-the-hip concept of thrust (now potentially negative) being completely run and forced into dual-use onto the same stick.
Specifically contrasts in behavior are:
Fixed-Pitch
- Thrust is a function of motor speed, and there is no negative thrust.
- An “oops moment” can be mitigated by slamming the stick down and cutting motor speed.
Collective-Pitch
- Thrust is a function of motor speed and blade angle, and there can be negative thrust.
- “Oops moments” are probably exacerbated by slamming the stick down because the motor speed may be constant in alternate flight-modes, or at a minimum the sudden new blade angle may result in unwanted behavior.
- Binding blade angle to motor speed at startup doesn’t exactly lend itself to easy or natural flight characteristics... hence alternate flight-modes.
The progression of experiments with configurations I’ve been working with so far for flight-mode-0 include: “dumbing down” the throttle and pitch; “smartening up” the pitch; and “divorcing” the pitch from the throttle. For flight modes 1 and 2, the accepted wisdom indicates that the throttle is set to a fixed-ish level, and the stick is pretty much only controlling the blade angle. I say “fixed-ish” because some configurations call for increasing the motor speed at the pitch extremes... (consider a curve like 100,90,100 for flight-mode-2)
So here’s the scenarios I’ve mentioned above:
Dumbing down the throttle and pitch
- Setting the Throttle-Channel to a curve like: -5,-5,0,30,60
- This pretty much follows Fixed-Pitch performance, where the heli will sit nicely until the motor is spun up to “flight speed”, and then the collective will provide increasing thrust coincident with increasing motor speed.
- This does allow for some “reasonable” flight performance, but doesn’t really provide the CP experience and training I’m looking for. (I know, I know... I could set up FM1 to get that experience, but that’s not my objective with this discussion.)
Smartening up the pitch
- Create a new Virtual Channel to put the blade angle into “no dirt sucking” mode while the blade is being spun up, but allow for full range of motion (-60 thru +60) once the throttle has reached mid-stick.
- This configuration seems to work “reasonably well” in that the full range of blade angles are available in FM0, but the motor speed is still tied to the stick, and at negative blade angles the CP performance characteristics suffer dramatically.
- Configuration details:
-- Presume that the “Throttle Hold Safety” described in other discussions is implemented in Virtual Channel 1.
-- Create a “Collective Pitch Safety” for the CP Channel as:
[channel6]
safetysw=!Virt3
safetyval=-5
where:
[virtchan3]
name=CPsafe
template=complex
[mixer]
src=Virt3
dest=Virt3
[mixer]
src=Virt1
dest=Virt3
switch=Virt1
offset=-1
[mixer]
src=THR
dest=Virt3
switch=!Virt1
offset=-1
muxtype=max
- This configuration even provides functionality for auto-rotation (I think...)
So, now we come to the “divorce” part of the discussion... I’m struck by the any and varied ways of trying to combine both the throttle control and pitch control into the same “bound” physical device. It seems to me that the concept of “throttle” and “pitch” for a Collective-Pitch heli should not be combined onto the same stick. To that end, I’ve been looking for a way to safely spin up the throttle to flight level, provide for “oops” control, and not use the CP stick.
Divorce the pitch from the throttle
- Use the stick to only control the Collective-Pitch
- Slowly spin up the motor using the Rudder DR switch. (same hand as thrust in the past, somewhat maintaining “oops” muscle memory)
- The Rudder DR switch also acts as a “Throttle Hold Safety”
- Configuration details:
[channel1]
speed=250
template=complex
[mixer]
src=Ch1
dest=Ch1
switch=FMODE0
scalar=1
muxtype=add
curvetype=fixed
[mixer]
dest=Ch1
switch=FMODE0
scalar=50
muxtype=delay
curvetype=fixed
[mixer]
src=Ch1
dest=Ch1
switch=FMODE0
scalar=60
muxtype=min
curvetype=fixed
[mixer]
dest=Ch1
switch=FMODE1
scalar=75
curvetype=fixed
[mixer]
dest=Ch1
switch=FMODE2
scalar=90
curvetype=fixed
[mixer]
src=Ch1
dest=Ch1
switch=RUD DR0
scalar=-100
curvetype=fixed
- This configuration will slowly spin up the throttle to “flight speed” completely independent of the CP position of the stick.
So, that’s what I’ve done. My questions to the group are: Am I completely wasting my time in pondering these alternatives? Is there any value in either of my alternatives, and are they worth pursuing? And finally, Is there a better or recommended way to approach the issue?
Your indulgence in my ramblings is appreciated, and I appreciate any response or insights you might provide...
Thanks,
Paul
Please Log in or Create an account to join the conversation.
- Hexperience
-
- Offline
Less
More
- Posts: 588
10 Apr 2014 02:46 - 10 Apr 2014 03:05 #22296
by Hexperience
Just so you know, a REAL heli has the throttle and pitch on the same stick... pitch is controlled by pulling up on the stick, throttle is controlled by twisting that same stick.
Yes, once the head speed is up, they "lock" the throttle (or use a governor) to keep a constant head speed. That's the same as a flat line for us. (+80,+80,+80)
Set your normal throttle curve to a straight line. -100,-50,0,+50,+100
Set your normal pitch curve to a slight negative pitch to full positive.
-15,-7,0,+50,+100
Now, with the stick all the way down, no throttle and just a touch of negative pitch. As you slowly move the stick up, you will pass 50% throttle and slowly lift off. It's really as easy as that.
However, you're really making it harder than it is. When you are doing it, you're not thinking about pitch vs throttle, it's just spinning and lifting off. IF you find that you are all the way at the top and haven't lifted off, then you would need to add some speed or check the setup of your blades to make sure you're getting enough positive pitch. But, on almost every CP heli, that is even close to correctly mechanically setup, you'll be hovering right about 60-70%.
When I'm setting up a new heli, my normal throttle AND pitch are simply straight lines.
If you want to tame it down, make your pitch curve -10,-5,0,+30,+60 as you have indicated. You can also make you throttle not go too high, something like: -100,-50,0,+50,+60. Again, you'll see how your heli is hovering and if you need more speed try throttle: -100,-25,+25,+50,+75
As for idleup mode, pitch: -60,-30,0,+30,+60 (or a -100,+100)
Throttle: +75,+50,+25,+50,+75 (or +75 all the way across) then adjust your head speed by adjusting that number. It depends on the size of heli you will be flying. A 450 is about 3000 rpm or so. A 700 might be 1750 rpm...
There are 10 types of people in this world. Those that understand binary and those that don't.
Replied by Hexperience on topic Stepping up to Collective Pitch
Correct.vanwadiver wrote: Fixed-Pitch
- Thrust is a function of motor speed, and there is no negative thrust.
- An “oops moment” can be mitigated by slamming the stick down and cutting motor speed.
So far so good...Collective-Pitch
- Thrust is a function of motor speed and blade angle, and there can be negative thrust.
- “Oops moments” are probably exacerbated by slamming the stick down because the motor speed may be constant in alternate flight-modes, or at a minimum the sudden new blade angle may result in unwanted behavior.
Not exactly sure what you mean here, but head speed and pitch are always working together to create lift. The "normal" way is to increase head speed as you increase pitch. As you move your stick up, the lift will increase and you'll get light on the skids, then lift off.- Binding blade angle to motor speed at startup doesn’t exactly lend itself to easy or natural flight characteristics... hence alternate flight-modes.
The moment you plug in the battery your throttle is almost at 50%. Always start a -100 (0%). What you have there is a Normal mode pitch curve.Dumbing down the throttle and pitch
- Setting the Throttle-Channel to a curve like: -5,-5,0,30,60
So, now we come to the “divorce” part of the discussion... I’m struck by the any and varied ways of trying to combine both the throttle control and pitch control into the same “bound” physical device. It seems to me that the concept of “throttle” and “pitch” for a Collective-Pitch heli should not be combined onto the same stick. To that end, I’ve been looking for a way to safely spin up the throttle to flight level, provide for “oops” control, and not use the CP stick.
Just so you know, a REAL heli has the throttle and pitch on the same stick... pitch is controlled by pulling up on the stick, throttle is controlled by twisting that same stick.
Yes, once the head speed is up, they "lock" the throttle (or use a governor) to keep a constant head speed. That's the same as a flat line for us. (+80,+80,+80)
Don't put throttle control on a switch like that, other then a "kill or hold".
Divorce the pitch from the throttle
- Use the stick to only control the Collective-Pitch
- Slowly spin up the motor using the Rudder DR switch. (same hand as thrust in the past, somewhat maintaining “oops” muscle memory)
- The Rudder DR switch also acts as a “Throttle Hold Safety”
Set your normal throttle curve to a straight line. -100,-50,0,+50,+100
Set your normal pitch curve to a slight negative pitch to full positive.
-15,-7,0,+50,+100
Now, with the stick all the way down, no throttle and just a touch of negative pitch. As you slowly move the stick up, you will pass 50% throttle and slowly lift off. It's really as easy as that.
Absolutely not. You've gone through all the fundamental ideas of throttle and pitch. You're learning.Am I completely wasting my time in pondering these alternatives?
However, you're really making it harder than it is. When you are doing it, you're not thinking about pitch vs throttle, it's just spinning and lifting off. IF you find that you are all the way at the top and haven't lifted off, then you would need to add some speed or check the setup of your blades to make sure you're getting enough positive pitch. But, on almost every CP heli, that is even close to correctly mechanically setup, you'll be hovering right about 60-70%.
When I'm setting up a new heli, my normal throttle AND pitch are simply straight lines.
If you want to tame it down, make your pitch curve -10,-5,0,+30,+60 as you have indicated. You can also make you throttle not go too high, something like: -100,-50,0,+50,+60. Again, you'll see how your heli is hovering and if you need more speed try throttle: -100,-25,+25,+50,+75
As for idleup mode, pitch: -60,-30,0,+30,+60 (or a -100,+100)
Throttle: +75,+50,+25,+50,+75 (or +75 all the way across) then adjust your head speed by adjusting that number. It depends on the size of heli you will be flying. A 450 is about 3000 rpm or so. A 700 might be 1750 rpm...
There are 10 types of people in this world. Those that understand binary and those that don't.
Last edit: 10 Apr 2014 03:05 by Hexperience.
Please Log in or Create an account to join the conversation.
- stringrazor
-
- Offline
Less
More
- Posts: 50
10 Apr 2014 02:59 #22297
by stringrazor
Replied by stringrazor on topic Stepping up to Collective Pitch
I found, as I think most new CP pilots do, that limiting the negative pitch to just enough to fight a small breeze (-5% or so) helps the most in transitioning from FP. Also, get used to flipping the HOLD switch to cut the throttle when you lose control and are about to crash. It also helps to dial "S" curves expos into the aileron and elevator rates so that the heli handles smoothly and won't flip.
I'm still progressing slowly and find I like practicing best at idle up with the throttle set at one speed so the TH stick only controls pitch.
I'm still progressing slowly and find I like practicing best at idle up with the throttle set at one speed so the TH stick only controls pitch.
Please Log in or Create an account to join the conversation.
- Hexperience
-
- Offline
Less
More
- Posts: 588
10 Apr 2014 03:12 - 10 Apr 2014 03:23 #22299
by Hexperience
There are 10 types of people in this world. Those that understand binary and those that don't.
Replied by Hexperience on topic Stepping up to Collective Pitch
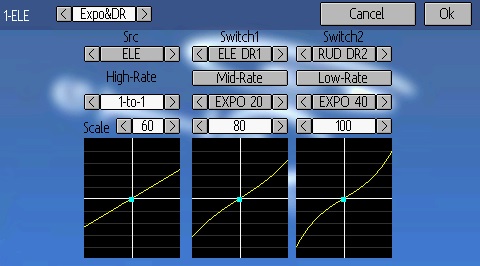
My take on expo, is that it's for experts. ")
Expo lets you have 100% control on the outside of the stick, and more tame near center. So if you panic and correct too far the other way, you give FULL deflection in what ever direction.
Setting the RATE (or scale in deviation) will allow you to over correct, but not end up giving 100% in any direction.
Here's how I do mine. Most of the time I find that the second rate is fast enough for me.
But see how the center of the line is about the same angle on all 3. If you panic in the 3rd rate, you're giving 100% really fast.
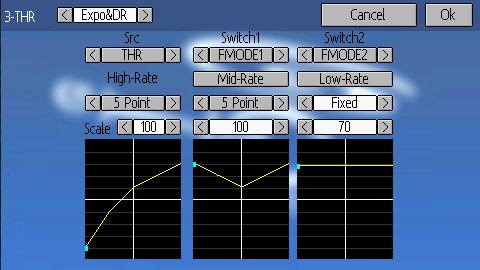
Here's my standard starting throttle setup
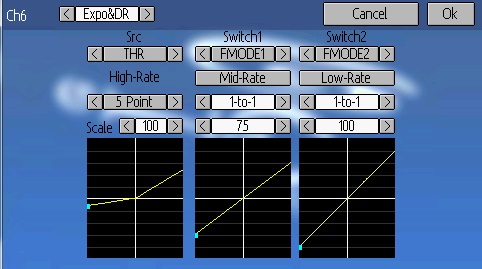
And pitch
Expo lets you have 100% control on the outside of the stick, and more tame near center. So if you panic and correct too far the other way, you give FULL deflection in what ever direction.
Setting the RATE (or scale in deviation) will allow you to over correct, but not end up giving 100% in any direction.
Here's how I do mine. Most of the time I find that the second rate is fast enough for me.
But see how the center of the line is about the same angle on all 3. If you panic in the 3rd rate, you're giving 100% really fast.
Here's my standard starting throttle setup
And pitch
There are 10 types of people in this world. Those that understand binary and those that don't.
Last edit: 10 Apr 2014 03:23 by Hexperience.
Please Log in or Create an account to join the conversation.
- stevecox
-
- Offline
- Keep swinging
10 Apr 2014 04:00 #22306
by stevecox
Adelaide
Replied by stevecox on topic Stepping up to Collective Pitch
Hexperience, that's a pretty damn handy post for some of us thanks!
Adelaide
Please Log in or Create an account to join the conversation.
- Jman841
-
- Offline
Less
More
- Posts: 45
10 Apr 2014 04:09 #22307
by Jman841
Replied by Jman841 on topic Stepping up to Collective Pitch
Agree,
Don't worry to much about your headspeeds and pitch. You can reduce your pitch a little but for a beginner you are much better to focus on limiting your Dual rates and a little expo can help as it will make movements around center less quick.
What heli are you doing this on?
The best way to learn CP IMHO is a simulator. If you do not have one already and plan to get involved in this hobby it is by far the best money you will ever spend.
Take it slow, learn your orientations, don't overthink it, and have fun!
there are already beginner settings set up for you in the model thread if you are running one of those models, they should be very tame to learn on.
Don't worry to much about your headspeeds and pitch. You can reduce your pitch a little but for a beginner you are much better to focus on limiting your Dual rates and a little expo can help as it will make movements around center less quick.
What heli are you doing this on?
The best way to learn CP IMHO is a simulator. If you do not have one already and plan to get involved in this hobby it is by far the best money you will ever spend.
Take it slow, learn your orientations, don't overthink it, and have fun!
there are already beginner settings set up for you in the model thread if you are running one of those models, they should be very tame to learn on.
Please Log in or Create an account to join the conversation.
- Tom Z
-
- Offline
10 Apr 2014 05:12 - 10 Apr 2014 14:18 #22309
by Tom Z
Replied by Tom Z on topic Stepping up to Collective Pitch
Had a question but figured it out.
Last edit: 10 Apr 2014 14:18 by Tom Z.
Please Log in or Create an account to join the conversation.
- Mmon77
-
- Offline
Less
More
- Posts: 14
10 Apr 2014 05:47 #22311
by Mmon77
This is what I've been doing. I recently got an HCP100. It's my first heli of any kind. I had been flying quads, so orientation, lack of self leveling (I don't use it on purpose), and small stick corrections are not foreign to me. Though the heli requires much more attention than a quad to keep it where you want it. I did however need to unlearn the habit of dumping the throttle in an emergency, since this would be bad on a CP heli.
So far, between limiting negative pitch, and practicing on the sim, I haven't crashed my heli yet. After reading all the stories of people spooling up, lifting off and crashing instantly, I've been pleasantly surprised.
Everyone learns differently, but to me, setting up the tx in a way that is totally different than how you'll fly later on will only develop more bad habits that you need to unlearn.
Replied by Mmon77 on topic Stepping up to Collective Pitch
I found, as I think most new CP pilots do, that limiting the negative pitch to just enough to fight a small breeze (-5% or so) helps the most in transitioning from FP
This is what I've been doing. I recently got an HCP100. It's my first heli of any kind. I had been flying quads, so orientation, lack of self leveling (I don't use it on purpose), and small stick corrections are not foreign to me. Though the heli requires much more attention than a quad to keep it where you want it. I did however need to unlearn the habit of dumping the throttle in an emergency, since this would be bad on a CP heli.
So far, between limiting negative pitch, and practicing on the sim, I haven't crashed my heli yet. After reading all the stories of people spooling up, lifting off and crashing instantly, I've been pleasantly surprised.
Everyone learns differently, but to me, setting up the tx in a way that is totally different than how you'll fly later on will only develop more bad habits that you need to unlearn.
Please Log in or Create an account to join the conversation.
- marcoose
-
- Offline
Less
More
- Posts: 21
11 Apr 2014 01:20 #22326
by marcoose
I am absolutely no expert, but totally agree with this. I have aspirations of someday using negative pitch, so I figure there is little point in burning bad habits into my memory.
The very first thing I did when I got my Super CP was to set the "top left" switch, whatever that may be, as a throttle kill for all my models (the rest of which are quads) and un-trained myself to drop the throttle stick.
I use the F-mode 0 for spinning up the throttle, going from -100 at the bottom to +80 or so at mid-stick, then I flip to F-mode 1 which has a throttle curve of +100 at the ends and +80 in the middle (so the switch change does nothing to throttle or pitch), and in F-mode 1 I have gentle positive and negative pitch, with F-mode 2 being full throttle and steeper pitch. Pretty much exactly as Hexperience so nicely showed with pictures.
I haven't found it that big an adjustment (other than left stick is up pretty high to fly compared to quads) but I feel happy I am learning "real" habits.
Replied by marcoose on topic Stepping up to Collective Pitch
Mmon77 wrote: Everyone learns differently, but to me, setting up the tx in a way that is totally different than how you'll fly later on will only develop more bad habits that you need to unlearn.
I am absolutely no expert, but totally agree with this. I have aspirations of someday using negative pitch, so I figure there is little point in burning bad habits into my memory.
The very first thing I did when I got my Super CP was to set the "top left" switch, whatever that may be, as a throttle kill for all my models (the rest of which are quads) and un-trained myself to drop the throttle stick.
I use the F-mode 0 for spinning up the throttle, going from -100 at the bottom to +80 or so at mid-stick, then I flip to F-mode 1 which has a throttle curve of +100 at the ends and +80 in the middle (so the switch change does nothing to throttle or pitch), and in F-mode 1 I have gentle positive and negative pitch, with F-mode 2 being full throttle and steeper pitch. Pretty much exactly as Hexperience so nicely showed with pictures.
I haven't found it that big an adjustment (other than left stick is up pretty high to fly compared to quads) but I feel happy I am learning "real" habits.
Please Log in or Create an account to join the conversation.
- vanwadiver
-
- Offline
Less
More
- Posts: 15
12 Apr 2014 16:28 #22363
by vanwadiver
Replied by vanwadiver on topic Stepping up to Collective Pitch
Thank you everyone for your suggestions and experiences. As I suspected, I’m probably over-thinking the issue and making it more complicated than it is.
I’m going to agree with stevecox that Hexperience’s posts are completely informative and exactly the kind insights from the more experienced end of the spectrum that I was hoping for. And everyone else’s comments and suggestions complete the rest of the picture for me...
To answer some of the questions posed above:
Yes, I have a flight simulator. I recognized early on that my projected cost for replacement parts would quickly exceed the cost of a simulator, and promptly invested in Phoenix. It’s a good simulator, but doesn’t completely emulate the “real” experience with all the physical, tactile, auditory, and visual characteristics.
My learning progression on helis has been: WL V911, Blade mSRx, Blade mCPx, and finally my most recent purchase of the Walkera V120D02S. I’ve been trying to acquire new flight characteristics as I go... V911 with the flybar for stability and early learning, mSRx flybarless for more realistic performance, mCPx for collective pitch, and finally the V120 to ditch the tail-motor and learn to fly something with characteristics like the larger birds. My “workhorse” for CP is the mCPX, mostly because I still crash a lot, and being smaller and running at a slower head speed than the V120 there is substantially less kinetic energy and therefore less to repair.
(I gotta plug the Deviation group “big time” at this point... No other single transmitter would allow me the progression of heli’s I’ve chosen above. The choice to use Deviation was probably the best most important decision I made when getting into this hobby!)
My biggest problem after entering the CP realm has definitely been the habit of cutting the throttle by “dumping” the stick, which is what has lead me down this path.
I think I’ll probably experiment around a little bit more until I settle on a final method and configuration, but that’s why I asked... I want to find the “right” configuration to base my new and hopefully final habits on, and everyone’s response has helped out a lot.
Thank you all
I’m going to agree with stevecox that Hexperience’s posts are completely informative and exactly the kind insights from the more experienced end of the spectrum that I was hoping for. And everyone else’s comments and suggestions complete the rest of the picture for me...
To answer some of the questions posed above:
Yes, I have a flight simulator. I recognized early on that my projected cost for replacement parts would quickly exceed the cost of a simulator, and promptly invested in Phoenix. It’s a good simulator, but doesn’t completely emulate the “real” experience with all the physical, tactile, auditory, and visual characteristics.
My learning progression on helis has been: WL V911, Blade mSRx, Blade mCPx, and finally my most recent purchase of the Walkera V120D02S. I’ve been trying to acquire new flight characteristics as I go... V911 with the flybar for stability and early learning, mSRx flybarless for more realistic performance, mCPx for collective pitch, and finally the V120 to ditch the tail-motor and learn to fly something with characteristics like the larger birds. My “workhorse” for CP is the mCPX, mostly because I still crash a lot, and being smaller and running at a slower head speed than the V120 there is substantially less kinetic energy and therefore less to repair.
(I gotta plug the Deviation group “big time” at this point... No other single transmitter would allow me the progression of heli’s I’ve chosen above. The choice to use Deviation was probably the best most important decision I made when getting into this hobby!)
My biggest problem after entering the CP realm has definitely been the habit of cutting the throttle by “dumping” the stick, which is what has lead me down this path.
I think I’ll probably experiment around a little bit more until I settle on a final method and configuration, but that’s why I asked... I want to find the “right” configuration to base my new and hopefully final habits on, and everyone’s response has helped out a lot.
Thank you all
Please Log in or Create an account to join the conversation.
Time to create page: 0.304 seconds
-
Home

-
Forum
-
General
-
General Discussions
- Stepping up to Collective Pitch