
- Posts: 16
Devo 7e & Naze32 SP F3 flightcontroller
- Koekebeest
-
Topic Author
- Offline
Less
More
17 Jul 2016 19:27 #51798
by Koekebeest
Devo 7e & Naze32 SP F3 flightcontroller was created by Koekebeest
Dear users,
I'm trying to build a ZMR X210 quad. The weirdest things happen when I connect radio to receiver. Most of the inputs (in CleanFlight) are crooked. Like not centered wich I believe gives unbalanced inputs while flying. Actually it flies REALLY wobbly. (or non fly-able)
It's funny because if I give power to the motors via CleanFlight the motors spin at the same time (like it should be) but when I power on and connect with radio some motors spin faster then the others...I've been busy for days with this now....resoldered everyting (except motor wires to ESC's) I even swapped PDB switched receivers and did flash newer software on my Devo 7e. Nothing seemed to work (except I can see the input values in CleanFlight now, hence the conclusion of "the crooked inputs in CleanFlight".
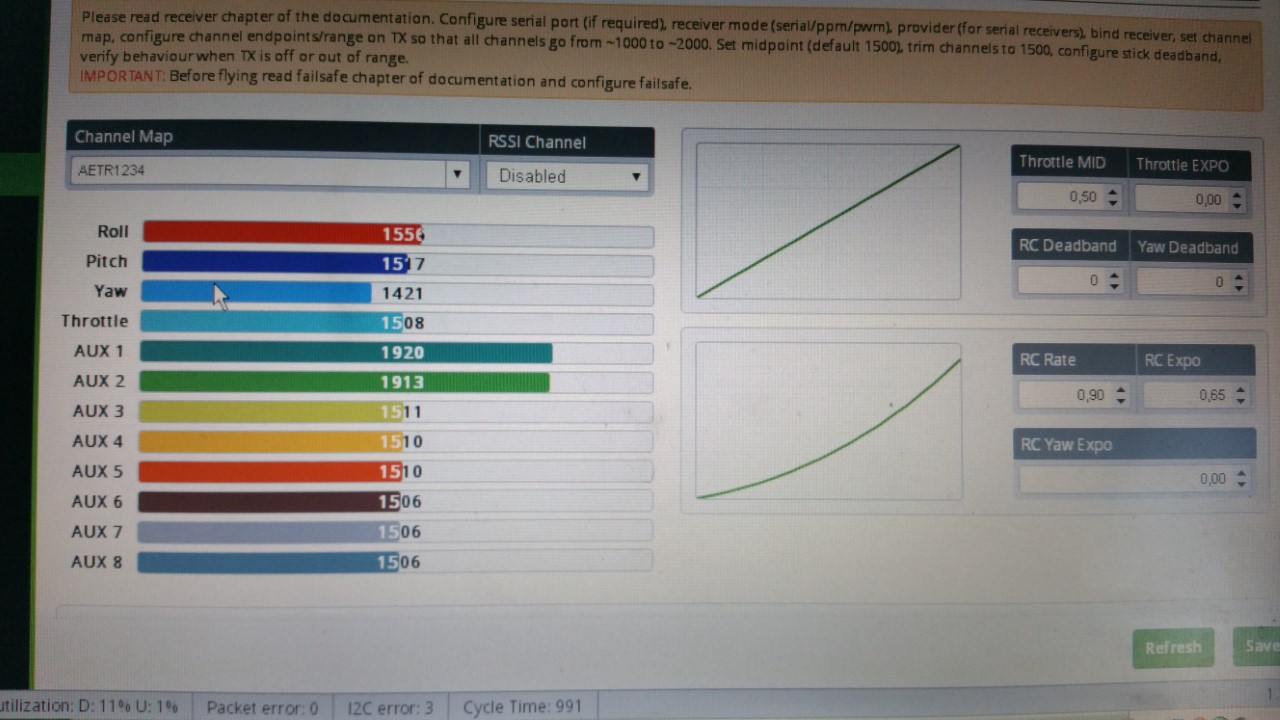
These values are at 0% input on all sticks
Does anyone have an idea what is causing this? I hope to solve this soon, with your help ofcourse!
Best regards,
Gabriël
I'm trying to build a ZMR X210 quad. The weirdest things happen when I connect radio to receiver. Most of the inputs (in CleanFlight) are crooked. Like not centered wich I believe gives unbalanced inputs while flying. Actually it flies REALLY wobbly. (or non fly-able)
It's funny because if I give power to the motors via CleanFlight the motors spin at the same time (like it should be) but when I power on and connect with radio some motors spin faster then the others...I've been busy for days with this now....resoldered everyting (except motor wires to ESC's) I even swapped PDB switched receivers and did flash newer software on my Devo 7e. Nothing seemed to work (except I can see the input values in CleanFlight now, hence the conclusion of "the crooked inputs in CleanFlight".
These values are at 0% input on all sticks
Does anyone have an idea what is causing this? I hope to solve this soon, with your help ofcourse!
Best regards,
Gabriël
- Fernandez
-
- Offline
Less
More
- Posts: 983
18 Jul 2016 06:05 #51807
by Fernandez
Replied by Fernandez on topic Devo 7e & Naze32 SP F3 flightcontroller
Did you calibrate your transmitter?
Should solve the issue.
Should solve the issue.
- Koekebeest
-
- Offline
Less
More
- Posts: 16
18 Jul 2016 09:49 #51820
by Koekebeest
Replied by Koekebeest on topic Devo 7e & Naze32 SP F3 flightcontroller
I did. Hm, maybe I did something wrong. I will try again soon and be back with feedback.
- Koekebeest
-
- Offline
Less
More
- Posts: 16
18 Jul 2016 10:59 #51822
by Koekebeest
Replied by Koekebeest on topic Devo 7e & Naze32 SP F3 flightcontroller
Yes this did solve that problem. Thanks!
I have another problem. When I give throttle via radio not all motors spin at the same time and do not have the same speed either! It's driving me crazy because the quad jiggles like crazy...only in Horizon mode btw. In Air mode everything seems fine. When I give throttle in the motortab on Cleanflight all motors spin perfectly fine.
This is at 30% throttle. And the other two motors were just going down and then completely stopped.
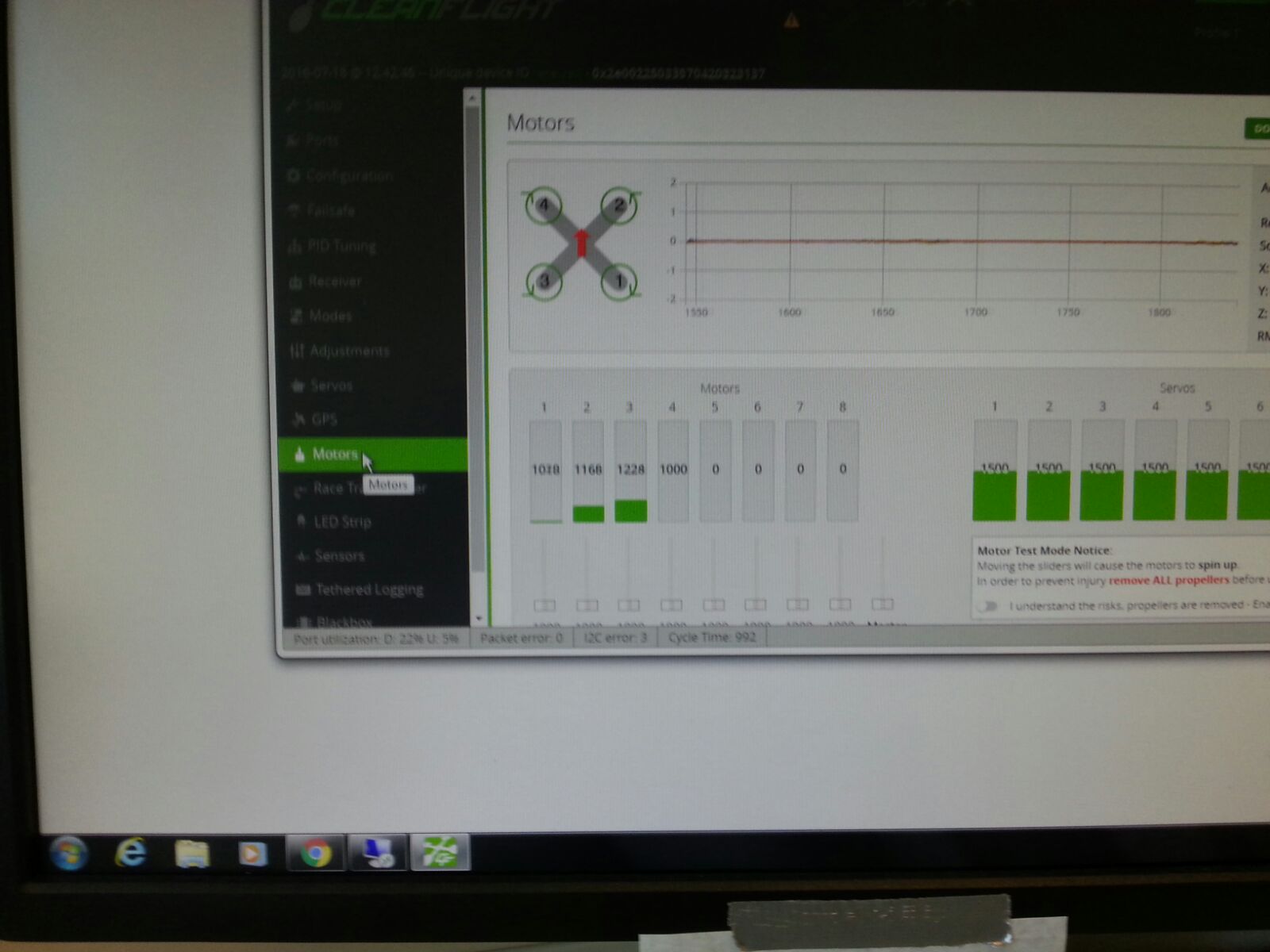
Any idea why it's doing that...and what could be wrong?
I sure hope so
I have another problem. When I give throttle via radio not all motors spin at the same time and do not have the same speed either! It's driving me crazy because the quad jiggles like crazy...only in Horizon mode btw. In Air mode everything seems fine. When I give throttle in the motortab on Cleanflight all motors spin perfectly fine.
This is at 30% throttle. And the other two motors were just going down and then completely stopped.
Any idea why it's doing that...and what could be wrong?
I sure hope so
- Cereal_Killer
-
- Offline
18 Jul 2016 20:09 #51846
by Cereal_Killer
Taranis X9E | DEVO 10 | Devo U7E | Taranis Q7
What I do in real life: rivergoequestrian.com/
Replied by Cereal_Killer on topic Devo 7e & Naze32 SP F3 flightcontroller
What it's doing and what you describe are the correct behavior. When you spin the motors via the GUI it knows you're not trying to fly, that you're just checking and it spins them all the same. When the give it throttle via the tx it knows you're trying to fly and it's stabilizing. You need to not worried about the motors running the same, the "problem" you're having is just the I gain loading up cause it's not flying and reacting how it thinks it should.
Ok example: say one or two motors will slow down and even stop, this happens cause of the I (integral) gain sensing that it's not reacting over an extended time. So it wants to tilt to X angle so it's purposely decreasing power to motors 2 and 3 right, in this case it's be commanding they slow down. Well it's sensing that it's not tilting how it wants over time (I gain) and it's lowering those 2 motors even more and more and more.
Again this is proper operation and is just how a PID controller works. The problem is likely just that it needs tuned.
Ok example: say one or two motors will slow down and even stop, this happens cause of the I (integral) gain sensing that it's not reacting over an extended time. So it wants to tilt to X angle so it's purposely decreasing power to motors 2 and 3 right, in this case it's be commanding they slow down. Well it's sensing that it's not tilting how it wants over time (I gain) and it's lowering those 2 motors even more and more and more.
Again this is proper operation and is just how a PID controller works. The problem is likely just that it needs tuned.
Taranis X9E | DEVO 10 | Devo U7E | Taranis Q7
What I do in real life: rivergoequestrian.com/
- Koekebeest
-
- Offline
Less
More
- Posts: 16
18 Jul 2016 21:32 #51851
by Koekebeest
Replied by Koekebeest on topic Devo 7e & Naze32 SP F3 flightcontroller
Thanks! I wouldn't have figured this out any other way. Someone else told me to just fly it so I did. It was fine-ish to fly. But I get a lot of jitters. I noticed you talked about PID's and clearly know a lot about it. ") What should I decrease or increase in your thoughts when you look at this #@$#@ video. (really bad maiden).
What should I decrease or increase in your thoughts when you look at this #@$#@ video. (really bad maiden).
On advice I did dial my rates down by now. But for me it's all about the undoing of the wobble/jitter/jiggle thingy. It's annoying with the YI on top.
Could you please help me out?
On advice I did dial my rates down by now. But for me it's all about the undoing of the wobble/jitter/jiggle thingy. It's annoying with the YI on top.
Could you please help me out?
- Fernandez
-
- Offline
Less
More
- Posts: 983
18 Jul 2016 21:48 #51852
by Fernandez
Replied by Fernandez on topic Devo 7e & Naze32 SP F3 flightcontroller
Maybe this is the wrong forum to tune your flight controller.
But if using the ACC, horizon or stabilized modes, did you calibrate on flat surface?
Personally I like a lot Betaflight, pretty good with out of the box settings!
Make sure you're esc run braked light and throttle is set correct in flight control and esc. I use 1000-2000 esc, and then 1040 (10 clicks more when just reliable rotating) -1960 in flight control and 950 for min command, to ensure motor is stopped.
But if using the ACC, horizon or stabilized modes, did you calibrate on flat surface?
Personally I like a lot Betaflight, pretty good with out of the box settings!
Make sure you're esc run braked light and throttle is set correct in flight control and esc. I use 1000-2000 esc, and then 1040 (10 clicks more when just reliable rotating) -1960 in flight control and 950 for min command, to ensure motor is stopped.
- Cereal_Killer
-
- Offline
18 Jul 2016 21:51 #51853
by Cereal_Killer
Taranis X9E | DEVO 10 | Devo U7E | Taranis Q7
What I do in real life: rivergoequestrian.com/
Replied by Cereal_Killer on topic Devo 7e & Naze32 SP F3 flightcontroller
It's not really possible to help you much via videos... tuning is something you've just gotta learn to do in thus hobby.
I will say for sure your pitch and roll P gains are to high. I can try to help you a bit more but at the end of the day you're gonna have to check other sources and research lot more than just here (this is a transmitter FW forum after all), the subject if PID tuning is an immense one and can consume as much time as everything else you've had to learn up till now.
Do this for me: post your current PID's and looptime. Post your frame size and if its not symmetrical calculate a cmix and switch to that.
I'll give you some hopefully good starting PID's based off that info and help you get setup to tune them and try to show you what it is you're doing but we'll never get it with just me looking at videos...
I will say for sure your pitch and roll P gains are to high. I can try to help you a bit more but at the end of the day you're gonna have to check other sources and research lot more than just here (this is a transmitter FW forum after all), the subject if PID tuning is an immense one and can consume as much time as everything else you've had to learn up till now.
Do this for me: post your current PID's and looptime. Post your frame size and if its not symmetrical calculate a cmix and switch to that.
I'll give you some hopefully good starting PID's based off that info and help you get setup to tune them and try to show you what it is you're doing but we'll never get it with just me looking at videos...
Taranis X9E | DEVO 10 | Devo U7E | Taranis Q7
What I do in real life: rivergoequestrian.com/
- Koekebeest
-
- Offline
Less
More
- Posts: 16
18 Jul 2016 22:18 #51855
by Koekebeest
Replied by Koekebeest on topic Devo 7e & Naze32 SP F3 flightcontroller
Yeah I'm sorry about this video. I have loads of questions about the transmitter too btw. Like why my receiver isn't capable of the 125% rates on the Devo 7e and it just stops receiving for seconds....but ...back to...you know....I can't use stock PIDS because they kind off not doing it right for me.
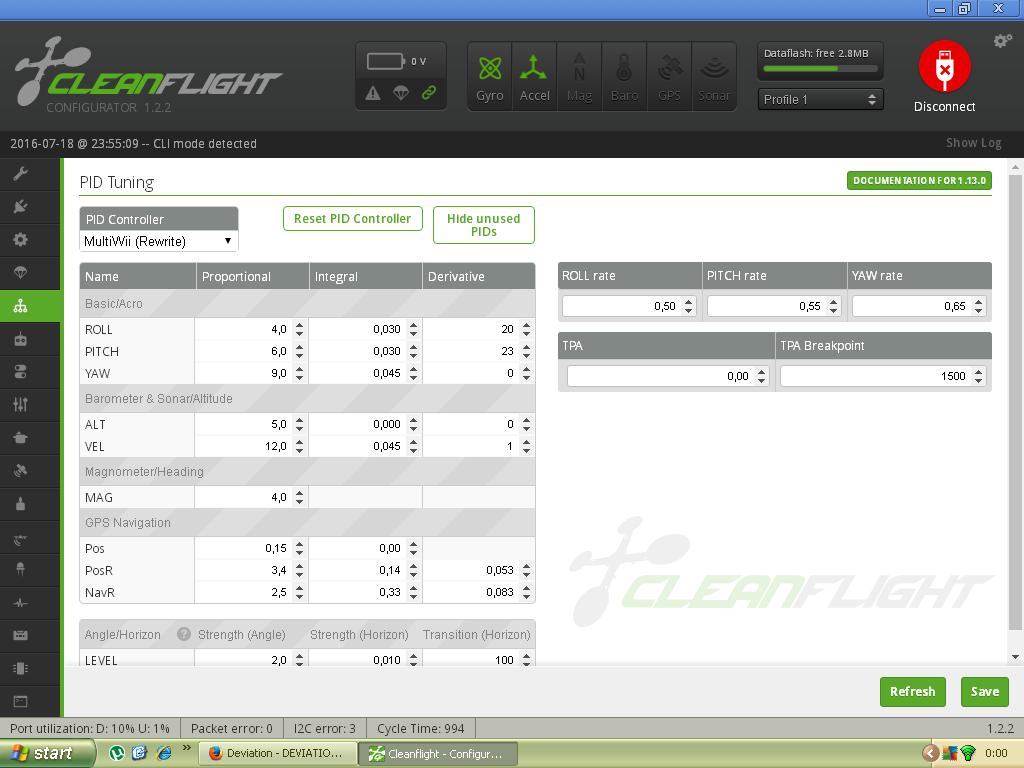
Looptime=1000
1000 cycles/sec (Hz)
I'm almost done building the ZMR X210 frame. X quad.
Thanks for helping me out man! That's awesome. I will be more on topic in the future.
Looptime=1000
1000 cycles/sec (Hz)
I'm almost done building the ZMR X210 frame. X quad.
Thanks for helping me out man! That's awesome. I will be more on topic in the future.
Time to create page: 0.193 seconds
-
Home

-
Forum
-
General
-
General Discussions
- Devo 7e & Naze32 SP F3 flightcontroller