11. 拡張トピックス¶
11.1. トレーナー機能の設定¶
Deviationはインストラクター (マスター) または受講者 (スレーブ) 送信機のいずれかのトレーナー機能で動作するために使用します。このモードでは、インストラクター側と受講者側はそれぞれの送信機をDSCポート経由でトレーナーコードと接続します。インストラクター側の送信機は実際に機体モデルと通信しますが、インストラクターはスイッチを使用して受講者が機体モデルを制御できるようにすることができます。スイッチが有効になると、受講者側の送信機はトレーナーコードを介してインストラクター側の送信機に (スティック) 入力情報を送信し、これらの入力信号はインストラクターの入力信号を置き換えます。
Deviationは、マスターモードまたはスレーブモードのいずれかをサポートしているほとんどの送信機で動作するよう設定が可能です。別メーカー間によるDeviationの組み合わせの場合は、ペアとなる送信機のPPMパラメータを確認する必要があります。また「Center PW」と「Delta PW」を適切に設定するだけでなく、送信されるチャンネル数とチャンネルの順序が分かります。この情報を確認する最良な場所である www.deviationtx.com フォーラムで尋ねてみてください。
11.1.1. Master Mode¶
Master modeは項目 Model setup (Std & Adv GUI) の「PPM In」スピンボックスから「Channel」または「Stick」のいずれかを選択して設定します。「Stick」または「Channel」で「ENT」を押すと、「Trainer Cfg」ページが表示されます。2つのモードの動作は若干異なります:
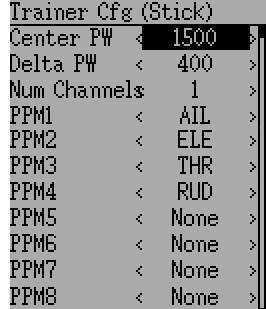
Stick: Stick modeでは、各入力チャンネルはマスター送信機のスティックにマッピングされます。このモードでは、スティックを動かしている受講者は、インストラクターがスティックを動かした時とまったく同じように動作します。一般にこのモードを使用すると、受講者の送信機はスティックポジション信号 (ミキシングなし) を直接通過し、インストラクターの送信機側で必要なミキシングをすべて行います。
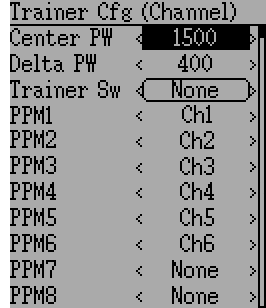
Channel: Channel modeでは、各入力チャンネルはインストラクターの送信機上の出力チャンネルにマッピングされます。このモードでは受講者の送信機は、機体モデル制御に必要なすべてのミキシングを行う必要があります。インストラクターと受講者の送信機が同じように設定されていることを注意して確認してください。そうでないとインストラクターと受講者のコントロールを切り替える際、機体モデルがうまく反応しない場合があります。
それぞれのTrainer Cfgページで設定可能なオプション:
- Center PW: 受講者の送信機がセンターへサーボ位置調整するために送信するパルス時間(μSec)を定義します。この数値が受講者の送信機と一致しない場合、サーボは中央に配置されません。
- Delta PW: 最大サーボ可動域を定義するために、受講者の送信機から送信されるパルス幅 (中央からの値) を定義します。この値が間違っていると、サーボが最大可動域の設定 (または最適なトラベル値) になりません。
- Trainer Sw: 受講者が機体モデルを制御できるようにするスイッチを定義します。
- PPM1...PPM8: 受講者の送信機からインストラクターのマッピング (チャンネルまたは入力のいずれか) を定義します。
11.1.2. Slave Mode¶
Slave modeは、項目 Model setup (Std & Adv GUI) のプロトコルとして「PPM」を選択することで設定します。プロトコルのスピンボックスで「ENT」を押すと、出力オプションを設定できます。設定については、項目 Protocol: USBHID を参照してください。Deviationは、チャンネル出力データをPPMを介して送信していることにご注意ください。「Stick」モード (上記参照) に設定されたDeviationマスターを備えたDeviationスレーブ送信機を使用するには、スレーブ送信機側でミキシングを行わないでください。
11.2. FPVまたは他外部入力の設定¶
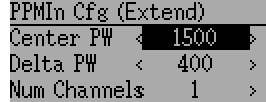
Deviationには、外部ソース (FPV設定等) からのPPM入力信号を使用する機能があります。このモードを設定するには、項目 Model setup (Std & Adv GUI) でPPM Inモードを「Extend」に設定します。
有効になったら、PPM Inスピンボックスの「ENT」を押して追加入力を設定します。
設定オプション:
- Center PW: センタリングされた入力のパルス幅を定義します(μSec)。
- Delta PW: サーボ可動域の最小値 / 最大値に到達するパルス幅の差異 (中心値からの差) を定義します。
- Num Channels: 入力チャンネル数を定義します。(一般的には8ch以上は非サポート)
11.3. 仮想スイッチとしてのトリムの使用¶
Deviationには、送信機の物理スイッチを補うための仮想スイッチを作成する機能があります。この機能は、Advanced GUIを使用している場合にのみ利用可能です。スイッチには3種類あります。
- Momentary: トリムボタンが押されている間だけスイッチが有効になります。
- Toggle: トリムボタンが押されるたびにスイッチがONからOFF、またはOFFからONに切り替わります。
- On/Off: 「Trim+」ボタンはスイッチをONにし、「Trim-」ボタンはOFFをONにします。
- 3 Pos: Trim+ ボタンが押されている間はスイッチは一方向に、Trim- ボタンが押されている間はもう一方の方向にスイッチが有効となり、ボタンをリリースすると中央に戻ります。
仮想スイッチを設定するには、まず「Trim」ページからTrimを選択し、トリムセットアップページに入ります。 Trims and Virtual Inputs (Std & Adv GUI) 参照
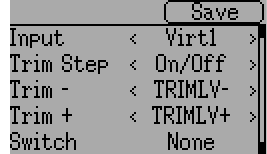
次に「Trim Step」欄に「Momentary」「Toggle」「On/Off」または「3 Pos」を設定します。これは「Trim Step」スピンボックスの左矢印を0.1秒以内で押すことで切り替わります。スイッチに変換する仮想チャンネルになるように「input」を選択します。(「Virt1」を使用)
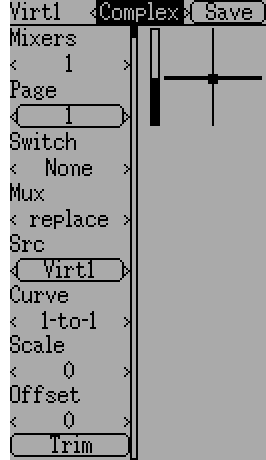
次に「Mixer」ページに移動して、指定した仮想チャンネルの設定を入力します。(この例ではVirt1)
mixer-typeを「Complex」に設定し「src」を現在の仮想チャンネル(Virt1)に設定し、カーブを「1-to-1」に設定します。(「Fixed」を使用しないでください)「0」を選択し最後に「Trim」ボタンを有効にします。
他のスイッチ入力と同じように仮想チャンネル (Virt1) を使用できるようになりました。仮想スイッチが有効な場合、仮想チャンネルは+100という値を持ち、それ以外の場合は-100の値を持ちます。「3 Pos」の場合、トリムが一方向に押されると仮想チャンネルは-100の値を持ち、もう一方の方向に押されると+ 100の値を持ちます。そうでない場合、値は0になります。
注: 仮想チャンネルを「Src」として使用する場合 (Switchではなく)、そのミキサーで「Trim」が無効になっていることを確認してください。そうしないとトリムが2回適用されてしまいます。
11.4. スワッシュ ミキシング¶
スワッシュプレートは、RCヘリコプターの飛行を制御するために使用されます。スワッシュプレートは主ローターの回転面とブレードピッチを制御します。スワッシュプレートは通常エレベーター、エルロン、コレクティブの3つのサーボに接続されていますが、設計上スティックの動きとサーボの動きの間に1対1「1-to-1」の対応はありません。代わりに、スロットル、エレベーターとエルロンのスティックとスワッシュプレート式サーボとの間で何らかのミキシングが必要です。このミキシングは、Cyclic Collective Pitch Mixing (CCMP) として知られています。
伝統的にRCヘリコプターは、安定性を維持するために一連のリンケージに取り付けられたメインローターの上部または下部にフライバーを使用しています。これらの設定では、送信機は通常すべてのミキシングを行い、3つのスワッシュプレートサーボのそれぞれを直接駆動させます。 この設定は手動CCPM (mCCPM) と呼ばれます。また、電子ミキサーを受信機の一部とする、または受信機とサーボ間で適切なミキシングを実行できるヘリコプターとする構成は電子CCPM (eCCPM) と呼ばれ、この場合、送信機はエルロン、エレベーター、およびコレクティブ入力を直接供給し、電子ミキサーは信号を適切なスワッシュプレートのサーボ動作に変換します。
最近、特にマイクロサイズのジャンルで、フライバーレス (FBL) ヘリコプターがより一般的になりました。 これらのヘリコプターは、物理的なフライバーいわゆるスタビライザーを必要とせずに安定性を維持し、また連続的にスワッシュプレートを調整するために電子ジャイロスコープと共にeCCPMシステムを使用します。この構成はより安価に製造できる傾向となり、またより良い安定性と正確な制御を提供します。
Deviationは120度、120度Alternate、140度、90度、設定なしを含む、いくつかのスワッシュプレートレイアウトの制御を提供します。これらのオプションはそれぞれ次の通りです。
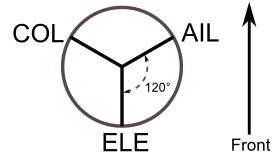
120 (3 Servo): サーボは120度の間隔でスワッシュプレート付近に配置されます。エルロン入力では、エルロンとピッチサーボがスワッシュプレートを左右に傾けます。 エレベーターの入力では、3つのサーボがスワッシュプレートを前後に傾けます。ピッチ入力では、3つのサーボがすべてスワッシュプレートを上下させます。 一元的に稼動するサーボは、トルク、精度、センタリングを飛躍的に向上させます。
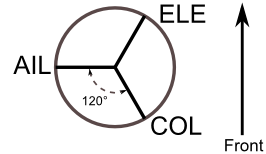
120X (3 Servo): サーボが150度シフトされている点を除き、上記のレイアウトと同じです。エルロン入力では、3つのサーボがスワッシュプレートを左右に傾けます。エレベーター入力の場合、エレベーターおよびピッチサーボは、スワッシュプレートを前後に傾動させます。ピッチ入力では、3つのサーボがすべてスワッシュプレートを上下させます。
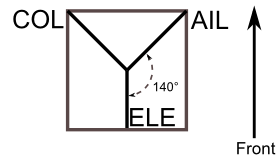
140(3 Servo): 基本的に140度スワッシュプレートのサーボ操作は、120度スワッシュプレートとほぼ同じです。しかしながら、エレベーター操作のためのサーボの仕組みは異なります。140度スワッシュプレートCCPMは、組み合わされたサーボの、よりスムーズな操作と全ての部分で等しい周期レートを提供します。120度の設定では、左右のサイクリックは前後のサイクリックよりもわずかに速くなります。
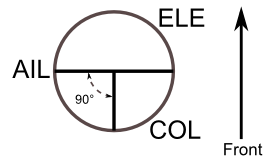
90(3 Servo): エルロン入力では、エルロンとピッチサーボがスワッシュプレートを左右に傾けます。エレベーター入力では、サーボはスワッシュプレートを前後に傾けます。ピッチ入力では、3つのサーボすべてがスワッシュプレートを上下させます。最も一般的に電子ヘリコプターで使用されます。
None: これはジャイロスコープを用いた飛行制御システムをオンボードしているヘリコプター全てのミキシングに対しての特別なケースとなります。ミキサー出力の設定方法については、製造元の説明書を参照してください。
注: 180度回転させた場合を除き、ヘリコプターの中には120度または140度のものがあります。このような場合でも、指定されたスワッシュプレートタイプを使用しますが、特定のチャンネルをリバース設定にする必要があるかもしれません。
11.5. サウンド設定¶
送信機をUSBドライブとしてマウントし「media」フォルダ内の「sound.ini」ファイルを編集することで、Devoにて作成された音源を編集できます。
項目とそれらの機能については次のとおりです:
- startup: 電源ONします。
- shutdown: 電源OFFします。
- volume: 送信機の音量を設定します。
- timer_warning: タイマーがもうすぐ切れます。
- alarm#: Timer # (1~4) が時間切れです。
- batt_alarm: バッテリー低下を警告します。
- done_binding: バインドが完了しました。
- key_pressing: キーを押します。
- Saving: モデルファイルを保存しています。
- max_len: キーボード入力での文字列の長さを超えています。
- telem_alarm#: テレメトリアラーム# (1〜6)が作動しました。
各項目において、あなたは0 (オフ) から100 (最大) まで「音量」を調整することができます。 残りのエントリーは音名で、値はその音を鳴らすミリ秒となります。 各サウンドには100段階制限があります。
名称「xx」は休符です (音は鳴りません)。そして音符 (「a」―「g」) を選択できます。「a」「c」「d」「f」または「g」の場合は「x」を追加することでシャープとすることができます。最後に「0」から「4」までの範囲でオクターブを選択することができます。それらは「c0」(中央のC) から「b4」までを範囲とします。さらに「a」「ax」「b」は中央のCの下の3音を奏でます。