10. Protocols¶
プロトコルによっては、追加カスタマイズや制限があります。各プロトコルについて以下に説明します。ヘッダのプロトコル名の前のアスタリスク (*) は、プロトコルをサポートするためにハードウェアモジュールを送信機に追加する必要があることを意味しています。送信機ディスプレイ上のアスタリスクは、Deviationが必要なモジュールを検出しないことを意味します。(インストールされていない、hardware.iniが正しくない、またはモジュールとの通信に関するその他の問題) 詳細は、モジュールのインストールガイドを参照してください。
http://www.deviationtx.com/wiki/#hardware_modifications
10.1. Protocol: DEVO¶
DEVOプロトコルは、Walkera DEVO受信機 / 機体との互換性を維持するため使用されます。このプロトコルは最大12チャンネルをサポートします。DEVOプロトコルは自動バインドと手動バインドの両方をサポートしています。Fixed IDが「None」に設定されている場合、送信機は電源を入れるたびに受信機との自動バインドを試みます。Fixed IDに値が設定されている場合、受信者は「Bind」ボタンを使用して1回手動でバインドする必要があります。その後、バインドされたままになります。Fixed IDはバインド手順の一部にすぎません。同じIDを持つ2つの送信機は同じ機体を制御できません。
DEVOプロトコルはテレメトリー機能の有効 / 無効もサポートします。このオプションは、DEVOが表示されているときにProtocolスピンボックスを押すことでアクセスできます。オプションはStd (標準フォーマット)、X350 (Walkera QR-X350フォーマット)、およびOffとなります。
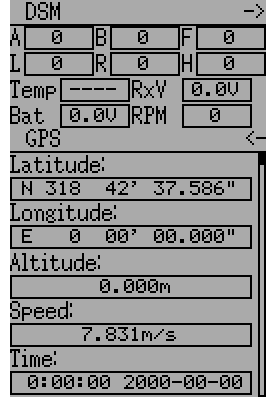
Devoテレメトリーでは以下の項目が利用可能です。すべての機体 / 受信機がすべての項目を報告するわけではないこと、そしていくつかの項目は有効にするために追加のモジュールを必要とすることに注意してください。
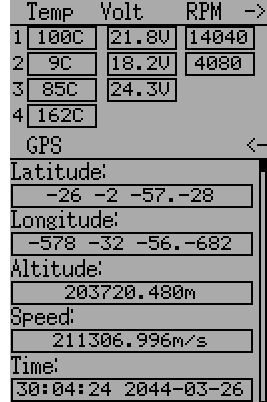
- Temp1/2/3/4: 温度の読み取り値。これらはバッテリー、モーター、またはその周囲の値。
- Volt1/2/3: 受信機バッテリーと外部バッテリーの電圧測定値。
- RPM1/2: モーター / エンジン回転数。
- GPS Data: GPSモジュールからの現在位置、速度、高度のデータ取得。
10.2. Protocol: WK2801¶
WK2801プロトコルは、古いWalkera機体の制御に使用されていました。以前のWalkera機体は、3つの類似しているものの同一ではないプロトコルに分割されていました: WK2801、WK2601、WK2401。これは、サポートされているチャンネル数にほぼ相当しますが、最近の6チャンネル受信機の多くは、実際にはWK2801プロトコルをサポートしています。WK2801は優れたプロトコルであるため、WK2601またはWK2401を試みる前に、古いWalkeraモデルで作業するときは、まずWK2801プロトコルを最初に試すことをお勧めします。WK2801プロトコルは最大8つのチャンネル、および自動バインドと手動バインドの両方をサポートします。Fixed IDが「None」に設定されている場合、送信機は電源を入れるたびに受信機との自動バインドを試みます。Fixed IDに値が設定されている場合、受信機は「Bind」ボタンを使用して1回手動でバインドする必要があります。その後、バインドされたままとなります。
10.3. Protocol: WK2601¶
WK2601プロトコルは、古いWalkera機体を制御するために使用されていました。以前のWalkera機体は、3つの類似しているものの同一ではないプロトコルに分割されていました: WK2801、WK2601、WK2401。これは、サポートされているチャンネル数にほぼ相当しますが、最近の6チャンネル受信機の多くは、実際にはWK2801プロトコルをサポートしています。WK2801は優れたプロトコルであるため、WK2601またはWK2401を試みる前に、古いWalkera機体で作業するときは、WK2801プロトコルを最初に試すことをお勧めします。WK2601プロトコルは最大7チャンネルをサポートし、自動バインドのみをサポートします。Fixed IDを使用できますが、電源投入時の自動バインドを妨げることはありません。
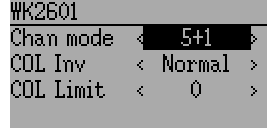
WK2601プロトコルは追加オプションもサポートしており、WK2601が表示されているときにProtocolスピンボックスを押すことでアクセスできます。
Chan mode: チャンネル構成を設定:
- 5+1: AIL、ELE、THR、RUD、GYRO (ch 7) は比例信号、ギア (ch 5) は二択信号、Ch 6は無効です。
- Hel: AIL、ELE、THR、RUD、GYROは比例信号となります。Gear (ch 5) は二択信号です。COL (ch 6) はThrにリンクされています。Ch6 >= 0の場合、受信機はThrに対し3Dカーブが適用されます。Ch6 < 0の場合、受信機はThrに対し通常曲線が適用されます。Ch6の値は、COL to THRの比率を定義します。
- 6+1: AIL、ELE、THR、RUD、COL (ch 6)、GYRO (ch 7) は比例信号、ギア (ch 5) は二択信号です。このモードは非常に実験的なものです。
- COL Inv: COLサーボを反転
- COL Limit: COLサーボの最大範囲を設定
10.4. Protocol: WK2401¶
WK2401プロトコルは、古いWalkera機体を制御するために使用されていました。以前のWalkera機体は、3つの類似しているものの同一ではないプロトコルに分割されていました: WK2801、WK2601、WK2401。これは、サポートされているチャンネル数にほぼ相当しますが、最近の6チャンネル受信機の主であるWK2801は4チャンネルまでサポートしており、自動バインドしかサポートしていないため、WK2601またはWK2401を試みる前に、古いWalkera機体で作業するときは、WK2801プロトコルを最初に試すことをお勧めします。Fixed IDを使用できますが、電源投入時の自動バインドを妨げることはありません。
10.5. Protocol: DSM2¶
DSM2プロトコルは多くのSpektrum社、JR社、およびこのプロトコルを使用している他機体を制御するために使用されます。DSM2プロトコルは最大12チャンネルをサポートします。8チャンネル以下の多くの受信機は送信機が7もしくはそれ以下のチャンネルに対応する必要があることに注意してください。チャンネル # が受信機に設定されていることを確認してください。DSM2は自動バインドをサポートしていません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
注: AILまたはELE操作から離れるまでバインドは終了しません。これはフェイルセーフ値を設定するため一部のDSM受信機のフェイルセーフボタンを押すことができるようにするためです。

DSM2プロトコルはテレメトリー機能の有効 / 無効もサポートします。このオプションは、DSM2が表示されているときにProtocolスピンボックスを押すことでアクセスできます。
DSM2テレメトリーでは以下のフィールドが利用可能です。このデータを取得するには、専用テレメトリーモジュールと追加センサーが必要です。
- FadesA/B/L/R: 各アンテナが微弱な信号を受信した回数。理想的にはこれらの数はすべて同じであるべきであり、各アンテナへの均等な受信を示します。
- Loss: 完全な信号損失 (通信フレーム破棄) が発生した回数
- Hold: 信号が失われたために受信機がフェイルセーフモードになった回数
- Volt1/2: 受信機と外部電源のバッテリー電圧
- RPM: エンジン / モーター回転数
- Temp: 外部温度センサーからの温度
- GPS Data: GPSモジュールからの現在位置、速度、高度のデータ取得。
10.6. Protocol: DSMX¶
DSMXプロトコルは多くのSpektrum社、JR社、およびこのプロトコルを使用している他機体を制御するために使用されます。DSMXプロトコルは最大12チャンネルをサポートします。8チャンネル以下の多くの受信機は送信機が7もしくはそれ以下のチャンネルに対応する必要があることに注意してください。チャンネル # が受信機に設定されていることを確認してください。DSMXは自動バインドをサポートしていません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
注: AILまたはELE操作から離れるまでバインドは終了しません。これはフェイルセーフ値を設定するため一部のDSM受信機のフェイルセーフボタンを押すことができるようにするためです。
Spektrum社またはJR社製の送信機とは異なり、DeviationはDSM2とDSMXとで自動的には選択されません。ユーザは使用するプロトコルを明示的に選択する必要があります。

DSMXプロトコルはテレメトリー機能の有効 / 無効もサポートします。このオプションは、DSMXが表示されているときにProtocolスピンボックスを押すことでアクセスできます。
DSMXテレメトリー項目のリストはDSM2プロトコルと同じであり、項目 :ref:`protocol-dsm2`に明記されています。
10.7. Protocol: J6Pro¶
J6Proプロトコルは、Nine Eagles社の機体をサポートするために使用されます。J6Pro送信機と互換性のある機体のみ使用できます。多くの古い4チャンネルのNine Eagles社製機体は、サポートされていない異なるプロトコルを使用されていました。J6Proプロトコルは最大12チャンネルをサポートしますが、6チャンネルのモデルのみがテストされています。J6Proは自動バインドをサポートしていません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
10.8. Protocol: WFLY¶
WFLYプロトコルは、WFR04S、WFR07S、WFR09SなどのWFLY受信機をサポートしています。
このプロトコルは最大9チャンネルをサポートします。デフォルトのチャネルマップはAETRです。
10.9. Protocol: *Flysky¶
Flyskyプロトコルは、Turnigy / Flysky受信機、および同じAFHDSプロトコル (WL V911、Xieda 9958等) を使用する他のいくつかの機体を制御するために使用されます。 NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Flyskyプロトコルは最大12チャンネル、そして自動バインドと手動バインドの両方をサポートします。「Fixed ID」が「None」に設定されている場合、送信機は電源を入れるたびに受信機との自動バインドを試みます。Fixed IDに値が設定されている場合、受信機は「Bind」ボタンを使用して1回手動でバインドする必要があります。その後、バインドされたままになります。
Flyskyプロトコルは、WLToysプロトコル拡張もサポートしています。Flyskyが表示されているときにProtocolスピンボックスを押すことでアクセスできます。
V9x9: WLToys V939、V949、V959、V969などのクワッドコプターの拡張機能を有効にします。
- ライトはチャンネル5にて制御します
- ビデオはチャンネル6にて制御します
- カメラはチャンネル7にて制御します
- フリップはチャンネル8にて制御します
V6x6: WLToys V636およびV686クワッドコプターの拡張機能を有効にします。
- ライトはチャンネル5にて制御します
- フリップはチャンネル6にて制御します
- カメラはチャンネル7にて制御します
- ビデオはチャンネル8にて制御します
- ヘッドレスモードはチャンネル9にて制御します
- RTHモードはチャンネル10にて制御します
- XおよびYのキャリブレーションは、それぞれチャンネル11と12によって制御します。
V912: V912、V913、V915ヘリコプターの拡張機能を有効にします。
これらのチャンネルをスイッチに割り当てる場合、スイッチをONにすることで状態が切り替わり、スイッチをOFFにすると効果はありません。したがってライトを点灯するには、チャンネル5に割り当てられているスイッチをOFFからONへ切り替えます。スイッチをOFFにしても効果はありません。スイッチをONにするとライトが消えます。
10.10. Protocol: *AFHDS-2A¶
AFHDS-2AプロトコルはTurnigy / Flysky AFHDS 2A受信機を制御するために使用されます。 NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
AFHDS-2Aプロトコルは最大14チャネルをサポートし、手動バインドが必要です。受信機は「Bind」ボタンを使用して1回手動でバインドする必要があります。
「AFHDS-2A」ページで設定可能なオプション:
- Outputs: 受信機に希望の出力タイプを設定します。PWM+IBUS、PPM+IBUS、PWM+SBUSまたはPPM+SUBS
- Servo Hz: 受信機のPWMリフレッシュレートを50Hz〜400Hzに設定します
- LQI output: オプションチャンネルにLQIを出力
- Freq-fine: 周波数オフセット調整。範囲-300〜300。A7105モジュール間の差異を調整します。デフォルトは0です。LQIテレメトリー値は、良好な周波数プロトコルオプションを調整するためのガイドとして使用します。
テレメトリーをサポートします。
10.11. Protocol: *Hubsan4¶
このプロトコルは、H107シリーズのHubsan-X4クワッドコプター、H111、H101、H102、H201、H202ヘリコプター、およびEstes Proto X (ただしProto X SLTではなく) で使用されます。(通常フォーマット)
このプロトコルはHubsan H301F、H302F、H303F、およびH304F (H301フォーマット) で使用されます。
このプロトコルはHubsan H501S、H122DおよびH123D (H501フォーマット) で使用されます。
NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Hubsan4プロトコルは最大13チャンネルをサポートし、通常フォーマットは自動バインドのみをサポートします。固定IDも使用できますが、電源投入時の自動バインドを妨げることはありません。最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。追加のチャンネルはクワッドコプターの特殊機能を制御します。
H301およびH501フォーマットでは、一番最初の使用前に各機体を手動でバインドする必要があります。
- チャンネル5はLEDを制御します
- チャンネル6フォーマットに応じて「フリップ」モード、高度維持モード、またはスタビライズドモードを有効にします。
- チャンネル7はビデオのON / OFF (H102) またはスナップショット撮影をします。
- チャンネル8はスナップショット撮影をします
- チャンネル9はヘッドレスモードを有効にします
- チャンネル10はRetern To Homeを有効にします
- チャンネル11はGPSホールドを有効にします
- チャンネル12はスポーツ1、スポーツ2またはアクロモードに設定します (H123D)
- チャンネル13は「フリップ」モードを有効にします (H122D)
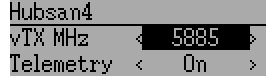
「Hubsan」ページで設定可能なオプション:
- vTX MHz: Hubsan H107D VTXで使用される周波数を定義します。(ビデオを受信および表示できる5.8GHz受信機が必要です。)
- Telemetry: 機体のバッテリー電圧情報の受信を有効にします。
- Freq-fine: 周波数オフセット調整。範囲-300〜300。A7105モジュール間の差異を調整します。デフォルトは0です。
10.12. Protocol: *Joysway¶
Joyswayプロトコルは、Joysway Caribbeanヨット、およびJoysway Orion、Explorer、Dragon Force 65ヨット、およびForce2 60 catamaranで使用されているJ4C12R受信機をサポートします。J4C12Rの飛行機バージョンを含む、他の機体や受信機はこのプロトコルでテストされていません。 NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Joyswayプロトコルは最大4つのチャンネルをサポートし、自動バインドをサポートしませんが、受信機側が要求するたびにバインドします。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体をバインドする必要があります。
最初のチャンネルはノーマルシートをコントロールし、2番目のチャンネルはラダーをコントロールしますが、これは機体モデルによって異なります。
10.13. Protocol: *Bugs3¶
Bugs3プロトコルは、MJX Bugs3およびBugs8の機体を制御するために使用されます。 NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
バインドするには、まずBugs3プロトコルを選択して「Bind」をクリックします。その後、機体の電源を入れます。バインドが成功すると、バインドダイアログが消えます。機体の無線IDは機体のFixed IDフィールドに格納されています。この値は変更しないでください。
機能を制御するために使用されるチャンネル。有効にするにはチャンネル値をゼロより大きな有効値へ設定してください。
- アーミングはチャンネル5にて制御します
- ライトはチャンネル6にて制御します
- フリップはチャンネル7にて制御します
- カメラはチャンネル8にて制御します
- ビデオはチャンネル9にて制御します
- アングル / アクロモードはチャンネル10にて制御します (アングルは0以上の値)
テレメトリー機能はRSSIと電圧アラームをサポートします。RSSI項目に報告される信号強度とVOLT1のバッテリー電圧の表示はFrskyテレメトリー画面を使用します。Bugs3受信機は良好 / 不良電圧を報告するのみとなります。これは良好の場合は8.4V、低電圧の場合は6.0VのVOLT1値に変換されます。
10.14. Protocol: *Frsky-V8¶
Frsky-V8プロトコルは片方向送信のみを使用する古いFrsky製の受信機を制御するために使用されます。 NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Frsky-V8プロトコルは8チャンネルをサポートし、自動バインドをサポートしません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
10.15. Protocol: *Frsky¶
Frskyプロトコルは、双方向プロトコル(D8)を使用して新しい (テレメトリー対応) Frsky製受信機を制御するために使用されます。 NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Frskyプロトコルは最大8チャンネルをサポートし、自動バインドをサポートしません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
Frskyプロトコルはテレメトリーの有効 / 無効もサポートします。このオプションは、Frskyが表示されているときにProtocolスピンボックスを押すことでアクセスできます。
テレメトリー機能が有効になっていると、受信機から送信された値 (RSSI、VOLT1、VOLT2) がサポートされます。
7eとf7以外の送信機では、追加のハブテレメトリー値がFrsky Xプロトコルと共通でサポートされています。下記項目「Frsky Telemetry」を参照してください。
10.16. Protocol: *FrskyX¶
Frysky Xプロトコルは、S.Portおよびハブテレメトリーを含むFrsky D16無線プロトコルを実装しています。
NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
このプロトコルは最大16チャネルをサポートします。Fixed IDバインドは、特定の受信側と送信側をリンクするためにサポートされています。すべての送信機で受信機テレメトリー (RSSI、VOLT1) をサポートします。次の項目で説明するように、S.Portとハブテレメトリーセンサー、およびGPSテレメトリー (メモリ制限のある7eとfシリーズを除く) をサポートします。
以下のプロトコルオプションが利用可能です。
Freq-fine: 周波数オフセット調整。範囲-127~127。CC2500モジュール間の差異を調整します。通常は0または-41のオフセットが必要ですが、バインドまたは通信レンジに問題がある場合は全範囲にてテストする必要があります。デフォルトは0です。LQIテレメトリー値は、良好な周波数プロトコルオプションを調整するためのガイドとして使用します。
AD2GAIN: VOLT2テレメトリー値 (X4RのAIN入力) にこの値を100で割った値を掛けます。外部抵抗分割ネットワークの調整が可能です。デフォルトは100 (ゲインは1) です。範囲は1〜2000です。(ゲインは0.01〜20.00)
Failsafe: Frskyのフェイルセーフオプションはフルサポートされています。チャンネルのフェイルセーフ (ミキサーチャンネル設定内) が設定されている場合、この値は9秒ごとに受信機に送信されます。プロトコルオプションがRXに設定されていない限り、受信機はフェイルセーフモードでこれらの値を使用します。
Format: 受信機のファームウェアに合わせてフォーマットを設定します。FCCおよびEUの両方とも行います。EUバージョンはFrsky LBTファームウェアと互換性がありますが、実際にはLBTテストを実行しません。
RSSIChan: LastChanに設定すると、受信したRSSIは最後の無線チャンネルで送信します。最後のチャンネルは、モデルのチャンネル数設定に基づいています。チャンネル値は、受信したRSSI値に21を掛けたものです。
S.Port Out: 有効にすると、受信したS.Portパケットがトレーナーポートに伝わり、拡張音声が無効になります。
Bind Mode: The bind mode will control which channels will be connected to the receiver PWM outputs and allow to enable or disable the receivers telemetry during bind.
Version: This will switch between FrSkyX V1.x.x and V2.1.x protocol version.
フェイルセーフがOFFに設定されているチャンネルの場合、デフォルトのフェイルセーフプロトコルオプション「Hold」は、受信機がフェイルセーフモードに入ったときに、最後に受信したチャンネル値を保持するように受信機に命令します。「NoPulse」設定は受信機のPPM出力に信号を送信させません。(X8RでのテストはSBUS値が最小になったことを示しましたが、SBUS動作はプロトコルによって規定されていません。) 「RX」設定はDeviationがフェイルセーフ設定を送信するのを防ぎますので、受信機に保存されているどんなフェイルセーフ値も使用します。
S.Port Outが有効かつPPMInが使用されていない場合、受信したS.Portパケットはトレーナーポートから送信されます。S.Portデコーダとの互換性を保つためビットレートは57600となりますが、標準デコーダに接続するには信号を反転する必要があります。3.3V FTDIアダプタの入力に直接接続することができます。
10.17. FrskyとFrsky X拡張テレメトリー¶
拡張テレメトリー機能は、ハブおよびS.Port Frskyテレメトリーセンサーを示します。これらのセンサーは7eを除くすべての送信機をサポートします。それらはTelemetry testページとメインページボックスで利用可能です。
Frsky X S.Portテレメトリー機能は、同じタイプの最大16個のセンサー (例:バッテリー電圧) の接続を可能にします。Deviationは同じタイプの複数のセンサーをサポートしますが、保存されるテレメトリー値は1つのみとなります。同じタイプのすべてのセンサーから最後に受信した値が報告されます。
Telemetry monitorページを表示しているときに、Upボタンを長押しすると、テレメトリー値がリセットされます。Frskyテレメトリーの場合、これは変動地上高度「ground level」を次の受信テレメトリー値にリセットします。これは変動地上高度テレメトリー値をゼロにします。また、バッテリー放電アキュムレータ:蓄電池と最小セル電圧もリセットされます。地面レベルの値は機体モデルファイルに保存され、電源を入れ直しても設定が保存されます。この値は、安定した上空を1日飛行する間はほぼ一定です。
Telemetry test page
次の表は、テレメトリーテストページ画面のレイアウトを示しています。
| Devo10 | ||
|---|---|---|
| Misc | Bat | Cells |
| RSSI | VOLT1 | CELL1 |
| TEMP1 | VOLT2 | CELL2 |
| TEMP2 | VOLT3 | CELL3 |
| RPM | MINCELL | CELL4 |
| FUEL | ALLCELL | CELL5 |
| ALTITUDE | VOLTA | CELL6 |
| VARIO | CURRENT | DISCHARGE |
| LQI | LRSSI | |
| Devo7e | ||
|---|---|---|
| Misc | Bat | Signl |
| RSSI | VOLT1 | LQI |
| VOLT2 | LRSSI | |
ALTITUDE値は地上高度「ground level」として報告されます。ground levelは、受信した最初の高度テレメトリー値として設定されます。
LQI (Link Quality Indicator) とLRSSI (Local RSSI) は、受信機からのテレメトリー信号の品質と信号強度を示します。LQIは、良好な周波数プロトコルオプションを調整するためのガイドとして使用します。LQIが低いほど良く、50未満の値が一般的です。LRSSIの単位は (おおよその) dBmです。
派生値: MINCELLは報告されたセルの最小値です。ALLCELLは、報告されたすべてのセル値の合計です。放電は、ミリアンペア時での総バッテリー放電量です。
10.18. Protocol: *Skyartec¶
Skyartecプロトコルは、Skyartec製受信機と機体を制御するために使用されます。 NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Skyartecプロトコルは最大7チャンネルをサポートします。自動バインドはサポートしません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
10.19. Protocol: *Futaba S-FHSS¶
Futaba S-FHSSプロトコルは、Futaba製受信機と機体を制御するために使用されます。XK社の一部のモデルでも使用されており、サードパーティ互換の受信機が利用可能です。 NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
S-FHSSプロトコルは最大8チャネルをサポートし、自動バインドのみをサポートします。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
従来のFutabaのチャンネルレイアウトは、エルロン、エレベーター、スロットル、ラダー、ギア、ピッチ、AUX1、AUX2です。そのためコレクティブピッチ (CP) ヘリコプターの制御に適しています。
Protocol resolutionは1024ステップ (10ビット)、そのうち実際には少し小さい範囲が使用されます。(サードパーティ製の機器を使用したリバースエンジニアリングによるデータによる) Temporal resolutionは6.8msです。テレメトリーはサポートされていません。
10.20. Protocol: *Corona¶
Coronaプロトコルは、Corona V1およびV2受信機、Flydream V3受信機をサポートしています。 NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
すべてのプロトコルは最大8チャンネルをサポートします。デフォルトのチャネルマップはAETRです。プロトコルにテレメトリーはありません。
以下のプロトコルオプションが利用可能です。
Format: プロトコル選択。Corona受信機ではV1とV2を使用してください。Flydream V3にはFDV3を使用してください。
Freq-fine: 周波数オフセット調整。範囲は-127~127。CC2500モジュール間の差異を調整します。通常は0または-41のオフセットが必要ですが、バインドまたは通信レンジに問題がある場合は全範囲にてテストする必要があります。デフォルトは0です。
10.21. Protocol: *Hitec¶
HitecプロトコルはOptimaまたはMinima受信機をサポートします。 NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
このプロトコルは最大9チャンネルをサポートします。デフォルトのチャネルマップはAETRです。テレメトリーは、Frskyテレメトリーレイアウトを用いることでサポートされます。サポートされている値は、VOLT1、VOLT2、CURRENT、TEMP1、TEMP2、FUEL、RPM、LRSSI、LQI、GPS (緯度、経度、高度、速度、方位) です。受信側RSSIはこのプロトコルでは利用できません。
以下のプロトコルオプションが利用可能です。
Format: OptimaまたはMinima受信機を選択
Freq-fine: 周波数オフセット調整。範囲は-127~127。CC2500モジュール間の差異を調整します。通常は0または-41のオフセットが必要ですが、バインドまたは通信レンジに問題がある場合は全範囲にてテストする必要があります。デフォルトは0です。
10.22. Protocol: *V202¶
V202プロトコルはWLToys V202クワッドコプターをサポートします。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
V202プロトコルは最大12チャンネルをサポートし、自動バインドをサポートしません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
1番最初となる4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。追加のチャンネルはクワッドコプターの特殊機能を制御します:
- チャンネル5は点滅の速度を制御します
- チャンネル6は「フリップ」モードを有効にします
- チャンネル7は画像撮影をします
- チャンネル8はビデオのON / OFFを制御します
- チャンネル9はヘッドレスモードのON / OFFを制御します
- チャンネル10はX軸をキャリブレーションします
- チャンネル11はY軸をキャリブレーションします
JXD-506フォーマットが選択されている場合、チャンネル10-12は以下の目的で使用されます:
- チャンネル10 スタート / ストップ
- チャンネル11 非常停止
- チャンネル12 ジンバルコントロール
またこのフォーマットと互換性のある機体では、アーミング前にスロットルスティックを中央にする必要があります。
10.23. Protocol: *SLT¶
SLTプロトコルはTacticSLT / Anylink受信機を制御するために使用されます。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
SLTプロトコルは最大6チャネルをサポートし、自動バインドのみをサポートします。Fixed IDを使用できますが、電源投入時の自動バインドを妨げることはありません。
10.24. Protocol: *HiSky¶
HiSkyプロトコルは、WLToys v922 v955モデルとともにHiSky製機体を制御するために使用されます。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
HiSkyプロトコルは最大7チャンネルをサポートし、自動バインドをサポートしません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
10.25. Protocol: *YD717¶
YD717プロトコルは、YD717およびSkybotz UFO Miniクワッドコプター、さらにSky Walker、XinXun、Ni Hui) のいくつかのモデル、およびプロトコルオプションによりSyma製をサポートしています。対応リストについては、サポートモジュール表を参照してください。NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
YD717プロトコルは9チャンネルをサポートし、自動バインドのみをサポートします。プロトコルはバインド成功するまでバインドモードのままとなります。
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。
チャンネル5は、ゼロより大きい場合オートフリップ機能が有効となります。さらに左右のオートフリップを有効にするには、エルロンのチャンネルスケールを87以上にする必要があります。エレベーターチャンネルと前後のフリップについても同様です。オートフリップが有効になっているとき、サイクリックを任意の方向にずっと動かすと、その方向にフリップが開始されます。YD717は各オートフリップまでに少なくとも4秒を必要とします。
ゼロより大きい場合、チャンネル6が点灯します。
チャンネル7は、有効とすることで写真撮影を行います。
チャンネル8は、有効とすることでビデオ録画を開始 / 停止します。
チャンネル9は、プロトコルで使用可能な最後の機能に割り当てられています。これはヘッドレスモード機能を持っている機体を制御することができるでしょう。
10.26. Protocol: *SymaX¶
このプロトコルはSymaモデルで使用されます: X5C-1、X11、X11C、X12、new X4、new X6。オリジナル X5C、X2をサポートする場合はプロトコルオプションに含まれ、これを用います。(Syma X3、旧X4、および旧X6は、YD717プロトコルのSymaX4オプションでサポートされます。) 詳細なリストは、サポートされているモジュール表を参照してください。 NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the "plus" version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
SymaXプロトコルは9チャンネルをサポートし、自動バインドのみをサポートします。
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。
チャンネル5は未使用です。
チャンネル5は使用されていません。チャンネル6はゼロより大きい場合にオートフリップ機能を有効にします。
チャンネル7は、有効とすることで写真撮影を行います。
チャンネル8は、有効とすることでビデオ録画を開始 / 停止します。
チャンネル9は、スイッチ有効時にヘッドレスモードを有効にします。
10.27. Protocol: *Hontai¶
このプロトコルはHontaiモデルF801およびF803で使用されます。
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the "plus" version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。追加のチャンネルは特殊機能を制御します:
- チャンネル5は未使用です
- チャンネル6はフリップ機能を有効にします
- チャンネル7は、ゼロより値を大きくし写真撮影を行います
- チャンネル8は、有効とすることでビデオのON / OFFを制御します
- チャンネル9はヘッドレスモードのON / OFFを制御します
- チャンネル10はReturn To Homeを有効にします
- チャンネル11はキャリブレーションを行います
10.28. Protocol: *Bayang¶
このプロトコルは、BayangToys X6、X7、X8、X9、X16、Boldclash B03、JJRC / Eachine E011、H8、H9D v2、H10、Floureon H101、JJRC JJ850、JFH H601、H606 (標準フォーマット) で使用されます。
このプロトコルは、高度維持機能 (X16-AHフォーマット) が含まれるBayangToys X16で使用されます。
このプロトコルはIRDRONE Ghost X5 (IRDRONEフォーマット) で使用されます。
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the "plus" version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。追加のチャンネルは特殊機能を制御します:
- チャンネル5はLEDまたは3D飛行を有効にします (Floureon H101)
- チャンネル6はフリップ機能を有効にします
- チャンネル7は、有効とすることでで写真撮影を行います
- チャンネル8は、有効とすることでビデオ録画を開始 / 停止します
- チャンネル9はヘッドレスモードのON / OFFを制御します
- チャンネル10はReturn To Homeを有効にします
- チャンネル11で、離陸 / 着陸を作動させます
- チャンネル12は、非常停止を作動させます
- チャンネル13はアナログAUXのチャンネル#1です
- チャンネル14はアナログAUXチャンネル#2です
注: チャンネル13と14は NFE Silverwareファームウェア<https://github.com/NotFastEnuf/NFE_Silverware/>_ (およびその他のSilverwareフォーク) を使用している場合にのみ有効となります。 プロトコルの標準以外の2つの信号は「アナログ」(非バイナリ) 補助チャンネルを追加するためのものです。送信機側でBayangプロトコルオプション「Analog Aux」を有効にし、SilverwareファームウェアでAnalog Aux機能を有効にする必要があります。送信機側と受信機側の設定が一致していないと、バインドが妨げられてしまいます。**
10.29. Protocol: *FY326¶
このプロトコルは、FY326 Red boardで使用されます。
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the "plus" version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。追加のチャンネルは特殊機能を制御します:
- チャンネル5は未使用です
- チャンネル6はフリップ機能を有効にします
- チャンネル7は未使用です
- チャンネル8は未使用です
- チャンネル9はヘッドレスモードのON / OFFを制御します
- チャンネル10はReturn To Homeを有効にします
- チャンネル11はキャリブレーションを行います
10.30. Protocol: *CFlie¶
CFlieプロトコルはCrazyFlie Nanoクワッドコプターで使用されます。他モデルではテストされていません。 NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the "plus" version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
CFlieプロトコルは最大4チャンネルをサポートし、自動バインドをサポートしません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
10.31. Protocol: *H377¶
H377プロトコルは、NiHui H377 6チャンネルヘリコプターをサポートします。他モデルではテストされていません。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
H377プロトコルは最大7チャンネルをサポートし、自動バインドはサポートしません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
10.32. Protocol: *HM830¶
HM830プロトコルは、HM830折畳み型A4サイズ紙飛行機をサポートします。他モデルではテストされていません。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
HM830プロトコルは5チャンネルをサポートし、自動バインドのみをサポートします。プロトコルはバインド成功するまでバインドモードのままとなります。
10.33. Protocol: *KN¶
KNプロトコルは、WLToys V930、V931、V966、V977、V988 (WLToys形式)、ならびにFeilun FX067C、FX070CおよびFX071C (Feilun形式) ヘリコプターで使用されています。他モデルではテストされていません。 NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the "plus" version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
KNプロトコルは最大11チャネルをサポートし、自動バインドをサポートしません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
チャンネル1-4は、スロットル、エルロン、エレベーター、ラダーです。チャンネル5は機体側デュアルレート設定を有効にします。チャンネル6はスロットルホールドを有効にします。チャネル7はアイドルアップを有効にします (WLToys V931、V966、およびV977のみ)。チャンネル8は、6G (初期値) と3Gスタビライザーを切り替えます。チャンネル9-11は、スロットル、ピッチ、エレベーター、ラダーのトリムチャンネルです。
10.34. Protocol: *ESky150¶
ESky 150プロトコルは、2014年以降の小型ESkyモデル (150、300、150X) をサポートします。他モデルではテストされていません。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Esky150プロトコルは最大7チャンネルをサポートし、自動バインドをサポートしません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
チャンネル1-4は、スロットル、エルロン、エレベーター、ラダーです。チャンネル5はフライトモード切替スイッチです。(2つの状態のみを切り替える1bitスイッチ) チャンネル6はテスト機体でもまだ使用されていません。チャンネル7は2bitスイッチ (4つの状態の切り替え) です。
4チャンネルモデルを使用している場合、機体モデルに4チャンネルしか割り当てないように設定することが重要となります。そうしないと、スロットル値がおかしくなる場合があります。
10.35. Protocol: *Esky¶
完了する必要があります。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Eskyプロトコルは最大6チャンネルをサポートします。自動バインドはサポートしません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
10.36. Protocol: *BlueFly¶
BlueFlyプロトコルはBlue-Fly HP100で使用されます。他モデルではテストされていません。 NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the "plus" version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
BlueFlyプロトコルは最大6チャンネルをサポートし、自動バインドをサポートしません。Fixed IDがNoneに設定されている場合は、代わりに送信機固有のIDが使用されます。最初の使用の前に各機体を手動でバインドする必要があります。
10.37. Protocol: *CX10¶
CX10フォーマットはCheerson CX10クワッドコプターをサポートします。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
CX10プロトコルは9チャンネルをサポートし、自動バインドのみをサポートします。プロトコルはバインド成功するまでバインドモードのままとなります。最初の4チャンネルはエルロン、エレベーター、スロットル、ラダーを表します。
チャンネル5はヘッドレスモードのCX-10Aを除きレートモードです。
チャンネル6はフリップモードです。
DM007フォーマットはカメラ撮影にチャンネル7、ビデオ録画にチャンネル8、ヘッドレスモードにチャンネル9を使用します。
このプロトコルにはBlue-A、Green、DM007、Q282、JC3015-1、JC3015-2、MK33041、Q242クワッドコプター用のフォーマットオプションがあります。
10.38. Protocol: *CG023¶
CG023プロトコルは、Eachine CG023および3D X4クワッドコプターをサポートします。他モデルではテストされていません。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
CG023プロトコルは9チャンネルをサポートし、自動バインドのみをサポートします。
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。
チャンネル5はLEDを制御します。
チャンネル6はフリップモードを制御します。
チャンネル7はカメラを制御します。
チャンネル8はビデオカメラを制御します。
チャンネル9はヘッドレスモードを制御します。
このプロトコルには、YD829クワッドコプター用のフォーマットオプションがあります。
10.39. Protocol: *H8_3D¶
H8_3Dプロトコルは、Eachine H8 3D、JJRC H20、およびH11Dクワッドコプターをサポートします。他モデルではテストされていません。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
H8_3Dプロトコルは11チャンネルをサポートし、自動バインドのみをサポートします。
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。
チャンネル5はLEDを制御します。
チャンネル6はフリップモードを制御します。
チャンネル7はカメラを制御します。
チャンネル8はビデオカメラを制御します。
チャンネル9はヘッドレスモードを制御します。
チャンネル10はRTHモードを制御します。
チャンネル11はH11Dのカメラジンバルを制御し、3つのポジションが選択できます。
両方のスティックを左下へ入れることで、H8 3Dでは水平キャリブレーションを開始、H20ではヘッドレスキャリブレーションを開始します。
H20とH11Dでは、両方のスティックを右下に入れることで水平キャリブレーションを開始します。
10.40. Protocol: *MJXq¶
MJXqプロトコルはMJXクワッドコプターをサポートします。Weilihua WLH08、Eachine E010<OEMモデル:JJRC H36>、JJRC H26D / H26WHはフォーマットオプションがあります。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
MJXqプロトコルは12チャンネルをサポートし、自動バインドのみをサポートします。
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。
チャンネル5はLEDを制御し、H26WHフォーマットが選択されている場合はアームします。
チャンネル6はフリップモードを制御します。
チャンネル7はカメラを制御します。
チャンネル8はビデオカメラを制御します。
チャンネル9はヘッドレスモードを制御します。
チャンネル10はRTHを制御します
チャンネル11はオートフリップ (X600およびX800フォーマット) またはカメラパーンを制御します
チャンネル12はカメラチルト:傾きを制御します
10.41. Protocol: *Bugs3Mini¶
Bugs3Miniプロトコルは、MJX Bugs3 MiniおよびBugs 3H飛行機を制御するために使用されます。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
バインドするには、まずBugs3Miniプロトコルを選択して「Bind」をクリックします。その後、機体の電源を入れます。バインドが成功すると、バインドダイアログが消えます。
機能を制御するために使用されるチャンネル。有効にするにはチャンネル値をゼロより大きな有効値へ設定してください。
- アーミングはチャンネル5にて制御します
- ライトはチャンネル6にて制御します
- フリップはチャンネル7にて制御します
- カメラはチャンネル8にて制御します
- ビデオはチャンネル9にて制御します
- アングル / アクロモードはチャンネル10にて制御します (アングルは0以上の値)
テレメトリー機能はRSSIと電圧アラームをサポートします。RSSIフィールドに報告される信号強度とVOLT1のバッテリー電圧の表示はFrskyテレメトリー画面を使用します。Bugs3 Mini受信機は良好 / 警告 / 低電圧を報告するのみとなります。これは良好の場合は8.40V、警告の場合は7.10V、低電圧の場合は6.40VのVOLT1値に変換されます。
10.42. Protocol: *E012¶
E012プロトコルは、Eachine E012クワッドコプターを制御するために使用されます。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
E012プロトコルは10チャンネルをサポートし、自動バインドのみをサポートします。
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。
- フリップはチャンネル6にて制御します
- ヘッドレスモードはチャンネル9にて制御します
- RTHモードはチャンネル10にて制御します
10.43. Protocol: *E015¶
E015プロトコルはEachine E015クワッドコプター/ 自動車 / ボートを制御するために使用されます。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
E015プロトコルは10チャンネルをサポートし、自動バインドのみをサポートします。
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。
- アーミングはチャンネル5にて制御します
- LEDライトはチャンネル6にて制御します
- フリップはチャンネル7にて制御します
- ヘッドレスモードはチャンネル9にて制御します
- RTHモードはチャンネル10にて制御します
10.44. Protocol: *NCC1701¶
NCC1701プロトコルは、Air Hogs Star Trek NCC-1701クワッドコプターを制御するために使用されます。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
NCC1701プロトコルは5チャネルをサポートし、自動バインドのみをサポートします。
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。
- ワープはチャンネル5にて制御します
10.45. Protocol: *V911S¶
V911Sプロトコルは、WLToys V911-Sヘリコプターを制御するために使用されます。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
V911Sプロトコルは5チャンネルをサポートします。受信機は「Bind」ボタンを使用して1回手動でバインドする必要があります。
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。
- キャリブレーションはチャンネル5にて制御します
10.46. Protocol: *GD00X¶
GD00Xプロトコルは、C17 C-17送信機およびGD006 Diamond DA62固定翼機の制御に使用されます。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
GD00Xプロトコルは5チャンネルをサポートし、自動バインドのみをサポートします。
最初の4チャンネルはエルロン、エレベーター、スロットル、ラダーを表します。この機体はスロットルチャネルとエルロンチャネルのみが使用されます。
- ライトはチャンネル5にて制御します
10.47. Protocol: *LOLI¶
LOLプロトコルは一般的なDIY nRF24L01受信機を制御するために使用されます。 NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
LOLIプロトコルは8チャンネルをサポートします。受信機は「Bind」ボタンを使用して1回手動でバインドする必要があります。
受信機の出力モードはプロトコルオプションで設定可能です。
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。
フェイルセーフ設定がサポートされています。
テレメトリーをサポートします。
10.48. Protocol: *E016H¶
E016HプロトコルはEachine E016Hクワッドコプターを制御するために使用されます。NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
E016Hプロトコルは8チャンネルをサポートし、自動バインドのみをサポートします。
最初の4チャンネルは、エルロン、エレベーター、スロットル、ラダーを表します。
- フリップはチャンネル5にて制御します
- ヘッドレスモードはチャンネル6にて制御します
- RTHモード (ワンキーリターン) はチャンネル7にて制御します
- 緊急停止はチャンネル8にて制御します
10.49. Protocol: PPM¶
PPMプロトコルは、トレーナーポートでPPM出力するために使用されます。この時すべての無線通信が無効となります。PPMはシミュレータまたはトレーナーポートに接続する他の無線モジュール接続に使用されます。Fixed IDは効果がなく、このプロトコルに関連付けられているバインドも行われません。
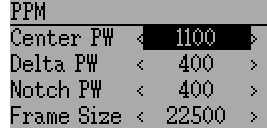
「PPM」ページで設定可能なオプション:
- Center PW: 送信機がセンターへサーボ位置を調整するために送信するパルス時間(μSec)を定義します。この数値がマスター送信機と一致しない場合、サーボは中央に配置されません。
- Delta PW: 最大サーボ可動域を定義するために送信機から送信されるパルス幅 (中心からの値) を定義します。この値が間違っていると、サーボが最大可動域の設定 (または最適なトラベル値) になりません。
- Notch PW: チャンネル間の遅延を定義します。
- Frame Size: 転送される全チャンネルの合計時間を定義します。
- Polarity: 信号の極性を定義します。標準は low が有効です。
トレーナーコードが送信機に接続されているときはDeviationは自動検出されません。(Phoenix等の)シミュレータでDeviationを使用するには、新しい機体モデルを作成し、それに適切な名称を作成し、プロトコルとしてPPMを選択します。PPMを有効にするには、Re-Initボタンまたは電源を入れ直します。
10.50. Protocol: USBHID¶
USBHIDプロトコルは送信機をUSBジョイスティックに変換します。USBケーブルで送信機をPCに接続すると、送信機がコンピュータによってジョイスティックとして検出されることを可能にします。これは、送信機がジョイスティック入力をサポートし、任意のシミュレータでの利用を可能にするために、このプロトコルは使用されます。初期調整が必要になる場合があります。これはOS側のコントロールパネルアプリを使用して行います。
10.51. Protocol: SBUS¶
SBUSプロトコルは、送信機のトレーナーポート (チップコネクタ) にシリアルデータを送信します。トレーナーポートリングはそれにより接続されます。T8SG PLUS送信機では、シリアルデータはJRモジュールベイの一番上のピンにも表示されます。シリアルデータは反転されないため、SBUS機器によってはアダプタが必要になる場合があります。最大16チャンネルがサポートされます。データレートは100kbpsです。フォーマットは8データビット、偶数パリティ、2ストップビットです。
10.52. Protocol: CRSF (Crossfire)¶
CRSFプロトコルは、Crossfireプロトコルのシリアルデータを送信機側ののトレーナーポート (チップコネクタ) に送信します。 トレーナーポートリングはそれにより接続されます。T8SG PLUS送信機では、シリアルデータはJRモジュールベイの一番上のピンにも表示されます。テレメトリーを有効にするには、シリアル入力をシリアル出力に接続する必要があります。トレーナーポートの場合はring1ポート先端へ、T8SGモジュールベイでは、上部ピンと下部ピンを互いに接続します。最大16チャンネルがサポートされます。
CRSFバインドおよび設定操作等はまだサポートされていません。Deviationを使用する前に、PCを使用してCrossfireモジュールと受信機をバインドしてください。
テレメトリー機能は、特定の送信機 (7e、F4、F12) では利用できません。
Telemetry test page
次の表は、テレメトリーテストページ画面のレイアウトを示しています。
| Devo10 | ||
|---|---|---|
| RX | TX | Bat |
| RxRSSI | TxRSSI | VBATT |
| RSSI2 | TxPOWER | CURRENT |
| RxSNR | TxSNR | CAPACITY |
| RxQUAL | TxQUAL | FMODE |
| PITCH | ROLL | YAW |
| RFMODE | ||
10.53. Protocol: PXX¶
PXXプロトコルは、それら送信機モジュールのFrskyシリアルインタフェースです。T8SG PlusのJRベイのR9MおよびXJTモジュールに主に利用されますが、プロトコルは他の送信機のシリアルポートで利用可能です。
最大16チャンネルがサポートされます。テレメトリー (S.Port) は、ほとんどの送信機でFrskyフォーマットとしてサポートされます。メモリ制約により、テレメトリー機能はモジュールビルド版では利用できません。通信レンジチェック機能がサポートされています。モジュールの電力設定はFCC / EU (例: 100 / 25mW) として表示されます。
送信機を特定の受信機にリンクするために固定IDがサポートされています。共有を容易にするために、固定IDはOpenTXの受信者番号に対応しています。0から63までの値が有効です。63を超える固定IDは有効範囲より切り捨てられます。
以下のプロトコルオプションが利用可能です。
failsafe: チャンネルのフェイルセーフ (ミキサーチャンネル設定画面内) が設定されている場合、この値は9秒ごとに受信機に送信されます。プロトコルオプションがRXに設定されていない限り、受信機はフェイルセーフモードでこの値を使用します。フェイルセーフがオフに設定されているチャンネルの場合、デフォルトのフェイルセーフプロトコルオプション「Hold」は、受信機がフェイルセーフモードに入ったときに、最後に受信したチャンネル値を保持するように受信機に命令します。「NoPulse」設定は受信機のPPM出力に信号を送信させません。(X8RでのテストはSBUS値が最小になったことを示しましたが、SBUS動作はプロトコルによって規定されていません。)「RX」設定はDeviationがフェイルセーフ設定を送信するのを防ぎますので、受信機に保存されているどんなフェイルセーフ値も使用します。
Country: 受信機のファームウェアに合うようにエリアを設定してください。オプションはUS、JP、EUです。
Rx PWM out: 受信機のPWM出力がチャンネル1-8、または9-16を選択します。
Rx Telem: 受信機のテレメトリーをON、またはOFFにします。
JRモジュールなしの送信機の場合、PXX信号はシリアルポート出力で利用します。通常はDevo12以外に関してはトレーナー用ジャックとなります。ステレオプラグを使用してください。TipがPXX出力になり、RingがS.Port入力になります。スリーブ部分はグラウンド:アースです。
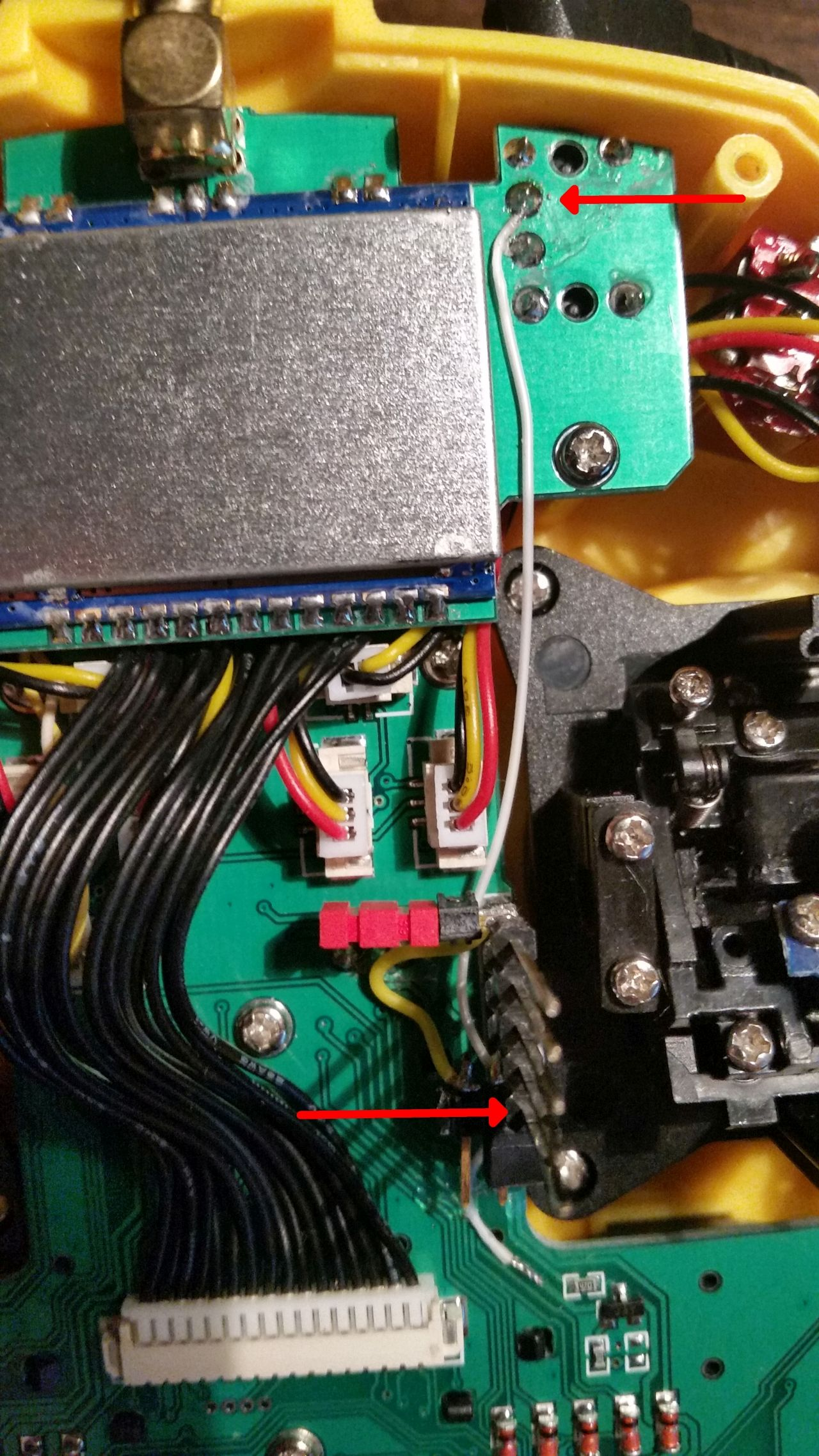
T8SG V2 Plusでは、JRベイのモジュールからテレメトリーを受信するためにハードウェアの変更が必要です。トレーナーポートリングは下部のJRピンに接続する必要があります。(写真参照)