11. Tópicos avançados¶
11.1. Configurando o Buddy-Box¶
Deviation pode ser usado para atuar como transmissor instrutor (Master ou mestre) ou aluno (Slave ou escravo) em uma configuração de Buddy-Box. Neste modo, o instrutor e o aluno conectam seus respectivos transmissores por um cabo, chamado Cabo de Instrutor, pela porta DSC. O transmissor do instrutor é o que se comunicará com o modelo, mas o instrutor pode usar um comutador e permitir que o aluno controle. Quando o interruptor do comutador está ativado, o transmissor do aluno envia informações de entrada (stick) através do cabo para o transmissor do instrutor e esses comandos sobrepõem as do instrutor.
Deviation pode ser configurado para funcionar com praticamente qualquer transmissor que suporte o modo mestre e/ou escravo. O Matching Deviation para um fabricante diferente requer reconhecer os parâmetros do PPM para o transmissor emparelhado, e configurar adequadamente o ‘Centro PW’ e ‘Delta PW’, assim como saber quantos canais são transmitidos e a sua ordem do canal. O melhor forma de encontrar estas informações é perguntar nos fóruns do www.deviationtx.com.
11.1.1. Modo Master¶
O modo Master é configurado selecionando “Canal” ou “Stick” no menu de seleção “PPM In” na seção: ref: model-setup. Pressionar “ENT” em “Stick” ou “Channel” mostrará as páginas “Trainer Cfg”. Os dois modos se comportam de maneira ligeiramente diferente:
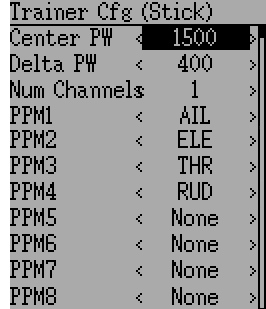
** Stick **: No modo stick, cada canal de entrada é mapeado para um stick no transmissor master. Nesse modo, o aluno que estiver movendo o stick se comportará exatamente como se o instrutor o tivesse movido. Geralmente, ao usar esse modo, o transmissor do aluno passará diretamente a posição do stick (sem mixar) e o transmissor do instrutor fará toda a mixagem necessária.
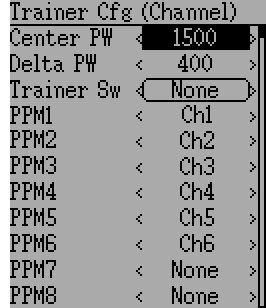
** Canal **: neste modo, cada canal de entrada é mapeado para um canal de saída no transmissor do instrutor. Desta forma, o transmissor do aluno fara toda a mixagem necessária para controlar o modelo. Deve-se ter cuidado para garantir que o instrutor e os transmissores dos alunos sejam configurados de forma idêntica, caso contrário, o modelo pode não reagir bem ao alternar entre o controle do instrutor e do aluno.
Opções configuráveis nas duas páginas Trainer CFG:
- ** Center PW **: Define o tempo (em µsec) do pulso que o transmissor do aluno envia para demonstrar a posição central do servo. Se esse número não corresponder ao transmissor do aluno, os servos não serão centralizados
- ** Delta PW **: Define a largura do pulso (medido a partir do centro) enviada pelo transmissor do aluno para definir o diro máximo do servo. Se este valor estiver incorreto, os servos não atingirão o final de curso
- ** Treino Sw **: define o switch que permite ao aluno assumir o controle do modelo
- ** PPM1 … PPM8 **: define o mapeamento (canal ou entrada) do transmissor do aluno para o instrutor.
11.1.2. Modo Slave¶
O modo Slave é configurado escolhendo “PPM” como o protocolo na seção: ref: model-setup. Pressionar ‘ENT’ no menu de rolagem do protocolo permitirá a configuração das opções de saída. Veja a seção: ref: protocol-ppm para configuração. Observe que o Deviation enviará os dados de saída do canal por meio do PPM. Para usar um transmissor slave Deviation com um master de desvio configurado para o modo “Stick” (ver acima), não deve haver mistura no transmissor slave.
11.2. Configurando o FPV ou outras entradas externas¶
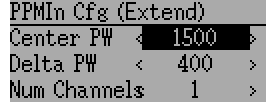
Deviation tem a capacidade de usar sinais de entrada PPM de uma fonte externa (como uma configuração de FPV por exemplo). Para configurar este modo, defina o modo PPM In para “Extend” na seção: ref: model-setup
Uma vez ativado, pressione ‘ENT’ no menu de rolagem PPM In para configurar as entradas adicionais.
Opções de Confirguração
- ** Center PW **: Define a largura de pulso para uma entrada centralizada (em µsec).
- ** Delta PW **: define a diferença na largura do pulso (do valor centralizado) para atingir o ponto mínimo / máximo do servo
- ** Num Canais **: Define o número de canais para entrada (geralmente não mais do que 8 são ser suportados)
11.3. Usando o Trim como Virtual Switch¶
Deviation tem a capacidade de criar switches virtuais para complementar os comutadores mecânicos do transmissor. Esse recurso só está disponível ao usar a GUI avançada. Existem 3 tipos de switches disponíveis:
- ** Momentâneo **: o interruptor ficará ativo somente enquanto o botão de compensação estiver pressionado
- ** Alternar **: o comutador será alternado de ativado para desativado ou desativado para cada vez que o botão de compensação for pressionado
- ** On / Off **: O botão Trim + irá ligar o interruptor, e o botão ‘Trim-‘ irá desligá-lo.
- ** 3 Pos **: O interruptor ficará ativo em uma posição enquanto o botão Trim + estiver pressionado, e na outra, desde que o botão Trim esteja travado, retornando ao centro quando liberado.
Para configurar um switch virtual, comece selecionando o trim na página ‘Trim’ e entrando na página trim-setup. Veja: ref: trims-and-virtual-inputs
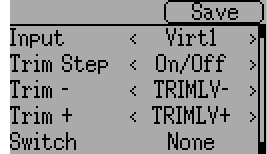
Em seguida, defina o campo ‘Trim Step’ para ‘Momentary’, ‘Toggle’, ‘On / Off’ ou ‘3 Pos’. Isso é feito pressionando-se a seta para a esquerda no menu de rolamento ‘Trim Step’ até que o valor seja menor que 0,1 Segundo, selecione o ‘Input’ para ser o canal virtual a ser convertido em um switch (usaremos o ‘Virt1’ )
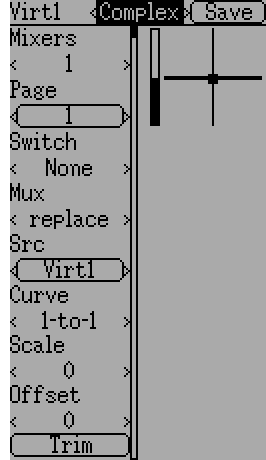
Agora vá para a página ‘Mixer’ e digite a configuração para o Virtual Channel especificado (Virt1 em nosso exemplo)
Definir o tipo de mixer para ‘Complex’, defina o ‘src’ para o canal virtual atual (‘Virt1’), defina a curva para ‘1-para-1’ (não use ‘fixo’), defina a escala para ‘0’ e finalmente habilitar o botão ‘Trim’.
Agora você pode usar o canal virtual (‘Virt1’) como qualquer outra entrada de comutador. Quando o comutador virtual está ativo, o canal virtual terá um valor de 100, caso contrário, terá um valor de -100. No caso de ‘3 Pos’, o canal virtual terá um valor de -100 quando o ajuste for pressionado em uma direção, +100 quando pressionado na outra direção, caso contrário, terá um valor de 0.
Note: If you use the virtual channel as a ‘Src’ (as opposed to a ‘Switch’) make sure that ‘trim’ is disabled for that mixer, otherwise the trim will be applied twice.
11.4. Swash Mixing¶
Um swash-plate é usado para controlar o vôo em um helicóptero RC. O plate oscilante controla o plano de rotação do rotor principal, bem como o passo da lâmina. Um plate oscilante é normalmente conectado a 3 servos conhecidos como Elevador, Aileron e Coletivo, mas devido ao seu design, não há uma correspondência de 1 para 1 entre o movimento do braço e o movimento do servo. Em vez disso, é necessária alguma mistura entre o acelerador, o elevador, os braços de aileron e os servos de plate oscilante. Esta mistura é conhecida como Mistura de Passo Coletivo Cíclico (CCMP).
Tradicionalmente, helicópteros RC usam um flybar por cima ou por baixo do rotor principal ligado a uma série de pontos para manter a estabilidade. Nestas configurações, o transmissor normalmente fará toda a mistura e acionará diretamente cada um dos 3 servos do plate oscilante. Essa configuração é conhecida como CCPM manual (mCCPM). Alternativamente, um mixer eletrônico pode ser incluído no helicóptero como parte do receptor, ou entre o receptor e os servos, que resulta na mixagem adequada. Essa configuração é conhecida como CCPM eletrônico (eCCPM) e, nesse caso, o transmissor fornece diretamente aileron, o elevador e as entradas coletivas, e o mixer eletrônico converterá os sinais em movimento apropriado do servo de plate oscilante.
Recentemente, helicópteros flybarless (FBL) se tornaram mais comuns, especialmente na faixa micro modelos. Esses helicópteros usam um sistema eCCPM juntamente com um giroscópio eletrônico para ajustar continuamente o plate oscilante para manter a estabilidade sem a necessidade de um flybar físico. Essa configuração tende a ser menos cara de fabricar, além de proporcionar melhor estabilidade e controle mais preciso.
Deviation fornece controle para vários layouts de plates oscilantes, que incluem: 120 °, 120 ° alternado, 140 °, 90 ° e nenhum. Cada uma dessas opções é ilustrada abaixo:
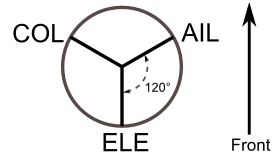
** 120 (3 Servo) **: Os servos são colocados ao redor do plate oscilante em intervalos de 120 °. Com a entrada do aileron, os servos de aileron e pitch inclinam o swash-plate para a esquerda e para a direita; com a entrada do elevador, os três servos inclinam o plate para a frente e para trás. Com a entrada Pitch, todos os três servos elevam o plate oscilante para cima e para baixo. Servos trabalhando em uníssono aumentam drasticamente o torque disponível, bem como a precisão e centralização.
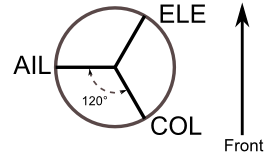
** 120X (3 Servo) **: Seguindo o layout acima, exceto que os servos são deslocados em 150 °. Com a entrada do Aileron, os três servos inclinam o plate oscilante para a esquerda e para a direita; com a entrada do elevador, os servos do elevador e do passo inclinam o plate para a frente e para trás; Com a entrada Pitch, todos os três servos elevam o plate oscilante para cima e para baixo.
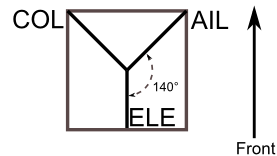
** 140 (3 Servo) **: Basicamente, as operações servo dos plates swash de 140 ° são quase o mesmo que plates swash de 120 °. No entanto, a disposição do servo para operação do elevador é diferente. Plate swash de 140 ° A CCPM oferece uma operação mais suave dos servos combinados e uma taxa cíclica igual ao redor. Em uma configuração de 120 °, o cíclico esquerdo / direito é ligeiramente mais rápido que o cíclico anterior / posterior.
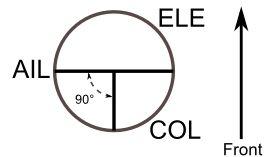
** 90 (3 Servo) **: Entrando o Aileron, os servos de aileron e pitch inclinam o swash-plate para a esquerda e para a direita; com a entrada do elevador, os servos inclinam o plate para a frente e para trás; Com a entrada Pitch, todos os três servos elevam o plate oscilante para cima e para baixo. Mais comumente usado para helicópteros eletrônicos.
** Nenhum **: Esta é uma situação especial onde toda a mixagem é feita a bordo do helicóptero usando um sistema de controle de vôo por giroscópico. Por favor, consulte as instruções específicas do fabricante para ver como configurar as saídas do mixer.
Nota: Alguns helicópteros são de 120 graus ou 140, exceto quando girados 180 graus. Nesses casos, você ainda usará o tipo de plate swash designada, mas pode precisar reverter aos canais específicos.
11.5. Modificando os sons¶
Você pode editar os sons que o seu Devo faz, mas você tem que fazê-lo conectando o transmissor em uma porta USB e editando o arquivo ‘sound.ini’ na pasta ‘media’.
As seções e o que faz com que elas sejam reproduzidas são:
- ** ligando **: ligado:
- ** desligar **: desligando.
- volume: Configurando o volume
- tempo de aviso: Tempo restante para o témino
- ** alarme # **: o temporizador # (1 a 4) expirou.
- batt_alarm: Aviso de final de bateria
- ** final_binding **: Bind finalizado.
- ** key_pression **: Tecla pressionada
- ** salvar **: ao salvar um arquivo de modelo.
- ** max_len **: quando você excedeu o tamanho de uma string no teclado.
- ** telem_alarm # **: alarme de telemetria # (1 a 6) disparou.
Em cada seção, você pode ajustar o ajuste ‘volume’ de 0 (desligado) a 100 (máx.). O restante das entradas são nomes de notas e o valor é o número de milissegundos para reproduzir essa nota. Há um limite de 100 notas para cada som.
Os nomes das notas são ‘xx’, que é um resto (nenhum som é reproduzido). Você pode então escolher uma nota (‘a’ - ‘g’), possivelmente dividida adicionando um ‘x’ se for ‘a’, ‘c’, ‘d’, ‘f’ ou ‘g’. Finalmente, você pode escolher uma oitava com um único dígito, variando de ‘0’ a ‘4’. Aqueles levam você de ‘c0’ (meio C) até ‘b4’. Além disso, ‘a’, ‘ax’ e ‘b’ tocarão as três notas abaixo do centro C.