10. Protocolos¶
Alguns protocolos possuem personalização ou limites adicionais. Cada um dos protocolos é descrito abaixo. Um asterisco (‘*’) antes do nome do protocolo no cabeçalho da seção significa que um módulo de hardware deve ser adicionado ao transmissor para suportar o protocolo. Na tela do transmissor, o asterisco significa que o Deviation não detecta o módulo necessário (não instalado, o hardware.ini não está correto ou outro problema de comunicação com o módulo). Mais informações podem ser encontradas no guia de instalação do módulo:
http://www.deviationtx.com/wiki/#hardware_modifications
10.1. Protocolo: DEVO¶
O protocolo DEVO é usado para manter a compatibilidade com os receptores / modelos Walkera DEVO. Este protocolo suporta até 12 canais. O protocolo DEVO suporta ligação automática e ligação manual. Se a ID Fixa for definida como “Nenhum”, o transmissor tentará se Bindar automaticamente ao receptor toda vez que for ligado. Se um valor for definido para ID fixa, o receptor deve receber o Bind manualmente uma única vez usando o botão “Bind”, após o qual ele deve permanecer vinculado. Observe que o ID fixo é apenas parte do procedimento de Bind. Dois transmissores com o mesmo ID não podem controlar o mesmo modelo.
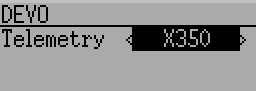
O protocolo DEVO também suporta a ativação/desativação do recurso de telemetria. Esta opção é acessada pressionando a caixa de rotação do protocolo quando DEVO é mostrado. As opções são Std (formato padrão), X350 (formato Walkera QR-X350) e Desligado.
Os campos a seguir estão disponíveis na Telemetria Devo. Observe que nem todos os modelos / receptores relatam todos os campos e que alguns campos exigem módulos extras para serem ativados.
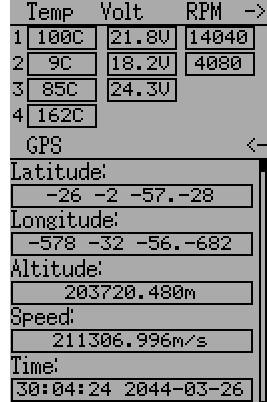
- ** Temp1 / 2/3/4 **: leituras de temperatura. Estes podem ser valores de bateria, motor ou ambiente
- ** Volt1 / 2/3 **: Leituras de tensão para bateria do receptor e baterias externas
- ** RPM1 / 2 **: valores de RPM do motor / motor
- ** Dados GPS **: Posição atual, velocidade e altitude com o módulo GPS
10.2. Protocolo: WK2801¶
O protocolo WK2801 é usado para controlar modelos Walkera antigos. Os modelos Walkera anteriores foram segmentados em 3 protocolos similares, mas não idênticos: WK2801, WK2601, WK2401. Isso corresponde aproximadamente ao número de canais suportados, mas muitos dos novos receptores de 6 canais na verdade suportam o protocolo WK2801. Recomenda-se experimentar o protocolo WK2801 em primeiro lugar ao trabalhar com modelos Walkera antigos antes de tentar o modo WK2601 ou WK2401, já que o WK2801 é um protocolo superior. O protocolo WK2801 suporta até 8 canais e Bind automático e Bind manual. Se a ID Fixa for definida como “Nenhum”, o transmissor tentará se vincular automaticamente ao receptor toda vez que for ligado. Se um valor for definido para ID fixa, o receptor deve ser vinculado manualmente uma única vez usando o botão “Bind”, após o qual ele deve permanecer vinculado.
10.3. Protocolo: WK2601¶
O protocolo WK2601 é usado para controlar modelos Walkera antigos. Os modelos Walkera anteriores foram segmentados em 3 protocolos similares, mas não idênticos: WK2801, WK2601, WK2401. Isso corresponde aproximadamente ao número de canais suportados, mas muitos dos novos receptores de 6 canais na verdade suportam o protocolo WK2801. Recomenda-se experimentar o protocolo WK2801 em primeiro lugar ao trabalhar com modelos Walkera antigos antes de tentar o modo WK2601 ou WK2401, já que o WK2801 é um protocolo superior. O protocolo WK2601 suporta até 7 canais e suporta apenas a Bind automático. O ID fixo pode ser usado, mas não impede a Bind automático durante a inicialização.
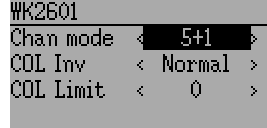
O protocolo WK2601 também suporta opções adicionais. Estes são acessados pressionando a caixa de rotação do protocolo quando Wk2601 é mostrado:
** Modo Chan **: define como os canais são processados:
- ** 5 + 1 **: AIL, ELE, THR, RUD e GYRO (ch 7) são proporcionais. Gear (ch 5) é binário. Ch 6 está desativado
- ** Heli **: AIL, ELE, THR, RUD, GYRO são proporcionais. Gear (ch 5) é binário. COL (ch 6) está ligado a Thr. Se Ch6> = 0, o receptor aplicará uma curva 3D ao Thr. Se Ch6 <0, o receptor aplicará curvas normais ao Thr. O valor de Ch6 define a proporção de COL para THR.
- ** 6 + 1 **: AIL, ELE, THR, RUD, COL (ch 6), GYRO (ch 7) são proporcionais. Gear (ch 5) é binário. Este modo é altamente experimental.
- ** COL Inv **: Inverte o servo COL
- ** COL Limit **: Define o intervalo máximo de servo COL
10.4. Protocolo: WK2401¶
O protocolo WK2401 é usado para controlar modelos Walkera antigos. Os modelos Walkera anteriores foram segmentados em 3 protocolos similares, mas não idênticos: WK2801, WK2601, WK2401. Isso corresponde aproximadamente ao número de canais suportados, mas muitos dos novos receptores de 6 canais na verdade suportam o protocolo WK2801. Recomenda-se experimentar o protocolo WK2801 em primeiro lugar ao trabalhar com modelos Walkera antigos antes de tentar o modo WK2601 ou WK2401, já que o WK2801 é um protocolo superior. O protocolo WK2401 suporta até 4 canais e suporta apenas ligação automática. O ID fixo pode ser usado, mas não impede a Bind automático durante a inicialização.
10.5. Protocolo: DSM2¶
O protocolo DSM2 é usado para controlar vários Spektrum ™ e JR ™, bem como outros modelos usando este protocolo. O protocolo DSM2 pode suportar até 12 canais. Note que muitos receptores com menos de 8 canais requerem que o Transmissor envie 7 ou menos canais. Certifique-se de que o número de canais esteja configurado adequadamente para o receptor. O DSM2 não suporta Bind automático. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
Observe que a Bind não ocorre até você mover os controles AIL ou ELE. Isso é para que você possa pressionar o botão Failsafe em alguns receptores DSM para definir o valor à prova de falhas.
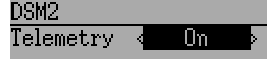
O protocolo DSM2 também suporta ativar / desativar o recurso de telemetria. Essa opção é acessada pressionando-se a caixa de rotação do protocolo quando o DSM2 é exibido.
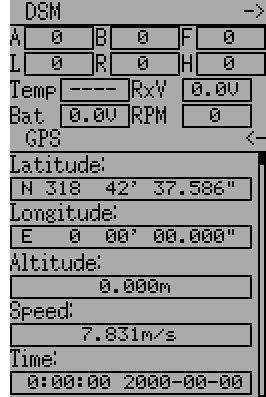
Os campos a seguir estão disponíveis na Telemetria do DSM2. Observe que um módulo de telemetria dedicado e sensores adicionais são necessários para capturar esses dados
- ** FadesA / B / L / R **: O número de vezes que cada antena recebeu um sinal fraco. O ideal é que esses números sejam todos semelhantes, indicando até recepção para cada antena
- ** Perda **: O número de vezes que a perda completa do sinal (queda de quadro) ocorreu
- ** Retém **: O número de vezes que o receptor entrou no modo de “à prova de falhas” devido à perda de sinal
- ** Volt1 / 2 **: Voltagem da bateria do receptor usando uma fonte externa
- ** RPM **: velocidade do motor
- ** Temp **: Temperatura do sensor externo
- ** Dados GPS **: Posição atual, velocidade e altitude com o módulo GPS
10.6. Protocolo: DSMX¶
O protocolo DSMX é usado para controlar vários Spektrum ™ e JR ™, bem como outros modelos que usam esse protocolo. O protocolo DSMX pode suportar até 12 canais. Note que muitos receptores com menos de 8 canais requerem que o Transmissor envie 7 ou menos canais. Certifique-se de que o número de canais esteja configurado adequadamente para o receptor. O DSMX não suporta Bind automático. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
Observe que a Bind não ocorre até você mover os controles AIL ou ELE. Isso é para que você possa pressionar o botão Failsafe em alguns receptores DSM para definir o valor à prova de falhas.
Observe que, diferentemente dos transmissores Spektrum ™ ou JR ™, o Deviation não selecionará automaticamente entre o DSM2 e o DSMX. O usuário deve selecionar qual protocolo usar.

O protocolo DSMX também suporta ativar / desativar o recurso de telemetria. Essa opção é acessada pressionando-se a caixa de rotação do protocolo quando o DSMX é exibido.
A lista de campos de telemetria do DSMX é idêntica àqueles no Protocolo DSM2 e está documentada na seção: ref: protocol-dsm2.
10.7. Protocolo: J6Pro¶
O protocolo J6Pro é usado para suportar os modelos Nine Eagles ™. Somente modelos compatíveis com o transmissor J6Pro podem ser usados. Muitos modelos Nine Eagles de 4 canais mais antigos usavam um protocolo diferente que não é suportado. O protocolo J6Pro suporta até 12 canais, embora apenas os modelos com 6 canais tenham sido testados. O J6Pro não suporta Bind automático. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
10.8. Protocolo: WFLY¶
O protocolo WFLY suporta receptores WFLY, como WFR04S, WFR07S e WFR09S.
O protocolo suporta até 9 canais. A ordem dos canais padrão é AETR.
10.9. Protocolo: *Flysky¶
O protocolo Flysky é usado para controlar os receptores Turnigy / Flysky, bem como alguns outros modelos usando o mesmo protocolo AFHDS (WL V911, Xieda 9958, etc). | a7105-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo Flysky suporta até 12 canais e Bind automático e/ou manual. Se a ID Fixa for definida como “Nenhum”, o transmissor tentará Bindar automaticamente ao receptor toda vez que for ligado. Se um valor for definido para ID fixa, o receptor deve ser Bindado manualmente uma única vez usando o botão “Bind”, após o qual ele deve permanecer vinculado.
O protocolo Flysky também suporta extensões do protocolo WLToys. Estes são acessados pressionando a caixa de rotação do Protocolo quando Flysky é mostrado:
** V9x9 **: Habilita as extensões para os quadcopters WLToys V939, V949, V959, v969, etc.
- As luzes são controladas pelo canal 5
- O vídeo é controlado pelo canal 6
- A câmera é controlada pelo canal 7
- Flip é controlado pelo Channel 8
** V6x6 **: Habilita as extensões para os quadcopters WLToys V636 e V686.
- As luzes são controladas pelo canal 5
- Flip é controlado pelo Channel 6
- A câmera é controlada pelo canal 7
- O vídeo é controlado pelo canal 8
- O modo sem cabeça é controlado pelo canal 9
- O modo RTH é controlado pelo canal 10
- A calibração X e Y é controlada pelos canais 11 e 12, respectivamente.
** V912 **: permite as extensões para os helicópteros V912, V913 e V915
Observe que, se esses canais forem atribuídos a um comutador, a ativação do comutador alterna o estado e a desativação do comutador não terá efeito. Assim, para acender as luzes, inverta o interruptor atribuído ao Canal 5 de desligado para ligado. Inverter o botão para desligado não tem efeito. Chavear o interruptor de volta agora apaga as luzes.
10.10. Protocolo: *AFHDS-2A¶
O protocolo AFHDS-2A é usado para controlar os receptores Turnigy / Flysky AFHDS 2A. | a7105-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo AFHDS-2A suporta até 14 canais e requer bIND manual. O receptor deve ser Bindado manualmente uma única vez usando o botão “Bind”, após o qual ele deve permanecer vinculado.
Opções configuráveis na página AFHDS-2A:
- ** Saídas **: Define o tipo de saídas desejadas no receptor, PWM + IBUS, PPM + IBUS, PWM + SBUS ou PPM + SUBS
- ** Servo Hz **: Define a taxa de atualização do receptor PWM entre 50 Hz e 400 Hz
- ** Saída LQI **: Saída LQI para canal opcional
- ** Freq-fine **: Ajuste de desvio de frequência. Intervalo de -300 a 300. Ajusta para variações entre os módulos A7105. Padrão 0. O valor de telemetria do LQI pode ser usado como um guia para ajustar a opção de protocolo de frequência fina.
Aceita Telemetria
10.11. Protocolo: *Hubsan4¶
Este protocolo é usado nos quadracópteros Hubsan-X4 dos helicópteros da série H107, H111, H101, H102, H201, H202 e no Estes Proto X (mas não no Proto X SLT). (formato padrão).
Este protocolo é usado no Hubsan H301F, H302F, H303F e H304F (formato H301)
Este protocolo é usado no Hubsan H501S, H122D e H123D (formato H501)
NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
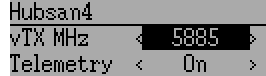
O protocolo Hubsan4 suporta até 13 canais, o formato padrão suporta apenas a Bind automático. O ID fixo pode ser usado, mas não impede o Bind automático durante a inicialização. Os canais da 1 a 4 representam o Aileron, o Elevator, o Throttle e o Rudder. Canais adicionais controlam as funções especiais do quadricoptero:
Com o formato H301 e H501, é necessário vincular manualmente cada modelo antes do primeiro uso
- O canal 5 controla dos LEDs
- Canal 6 Permite o modo “flip” ou modo de espera ou estabilizado, dependendo do formato.
- Canal 7 Liga ou desliga o vídeo (H102) ou tira fotografias
- Canal 8 tira uma fotografia
- Canal 9 Ativa o modo sem cabeça
- Canal 10 ativa o RTH
- Canal 11 Permite o nivelamento por GPS
- Canal 12 Define Sport 1, Sport 2 ou modo Acro (H123D)
- Canal 13 Permite o modo “flip” (H122D)
Opções configuráveis na página Hubsan:
- ** VTX MHz **: Define a freqüência usada pelo transmissor de vídeo Hubsan H107D (Requer um receptor de 5.8GHz capaz de receber e reproduzir o vídeo).
- ** Telemetria **: permite a recepção da tensão da bateria do modelo.
- ** Freq-fine **: Ajuste de desvio de frequência. Intervalo de -300 a 300. Ajusta para variações entre os módulos A7105. Padrão 0
10.12. Protocolo:*Joysway¶
O protocolo Joysway suporta o iate modelo Joysway Caribbean, e o receptor J4C12R usado nos iates modelo Joysway Orion, Explorer, Dragon Force 65 e catamarã Force2 60. Nenhum outro modelo ou receptor foi testado com este protocolo, incluindo versões aéreas do J4C12R. | a7105-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo Joysway suporta até quatro canais, não suporta Bind automático, mas será Bindado sempre que um receptor solicitar uma ligação. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar cada modelo antes do primeiro uso.
O primeiro canal normalmente controla as folhas e o segundo canaliza o leme, mas isso pode variar de modelo para modelo.
10.13. Protocolo: *Bugs3¶
O protocolo Bugs3 é usado para controlar aeronaves MJX Bugs3 e Bugs8. | a7105-note | | mod-install-link |
Para ligar primeiro, escolha o protocolo bugs3 e clique em Bind. Em seguida, energize à aeronave. A caixa de diálogo de Bind desaparecerá se a ligação for bem-sucedida. O id do rádio da aeronave é armazenado no campo ID fixo do modelo. Não mude esse valor.
Canais usados para controlar funções. Defina o valor do canal maior que zero para ativar.
- Arming é controlado pelo Canal 5
- Luzes é controlado pelo Canal 6
- Flip é controlado pelo Canal 7
- Camera é controlada pelo Canal 8
- Vídeo é controlado pelo Canal 9
- Angle/Acro são controlados pelo Canal 10 (>0 é considerado Angulo)
A telemetria e alarme de voltagem é suportados por RSSI. Ele usa a tela de telemetria Frsky com a intensidade do sinal informada no campo RSSI e a voltagem da bateria em VOLT1. O receptor bugs3 reporta apenas boa / baixa voltagem. Isso é traduzido para valores de VOLT1 de 8,4V para boa e 6,0V para baixa tensão.
10.14. Protocolo: *Frsky-V8¶
O protocolo Frsky-V8 é usado para controlar os antigos receptores Frsky ™ usando o protocolo unidirecional. | nota do cc2500 |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo Frsky-V8 suporta 8 canais, não suporta auto-Bind. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
10.15. Protocolo: *Frsky¶
O protocolo Frsky é usado para controlar receptores Frsky ™ mais novos (telemetria habilitados) usando o protocolo de duas vias (D8). | nota do cc2500 |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo Frsky suporta até 8 canais, não suporta auto-Bind. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
O protocolo Frsky também suporta ativação / desativação de telemetria. Esta opção é acessada pressionando a caixa de rotação do protocolo quando Frsky é mostrado.
Quando a telemetria é ativada, os valores enviados pelo receptor (RSSI, VOLT1, VOLT2) são suportados e trabalhados
Os valores adicionais de telemetria do Hub são suportados em comum com o protocolo FrskyX nos transmissores, exceto o 7e e f7. Veja a seção de Telemetria Frsky abaixo.
10.16. Protocolo: *FrskyX¶
O protocolo FryskyX implementa o protocolo de rádio Frsky D16, incluindo a telemetria S.Port e hub.
NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Este protocolo suporta até 16 canais. A ligação de ID fixa é suportada para ligar o transmissor a receptores específicos. Suporta telemetria do receptor (RSSI, VOLT1) em todos os transmissores. Suporta os sensores de telemetria S.Port e hub, bem como a telemetria GPS (exceto nos modelos 7e e f de memória limitada), conforme descrito na próxima seção.
As seguintes opções de protocolo estão disponíveis.
** Freq-fine **: Ajuste de desvio de frequência. Intervalo -127 a 127. Ajusta as variações entre os módulos CC2500. Normalmente, o deslocamento de 0 ou -41 é necessário, mas o intervalo completo deve ser testado se houver problemas com a vinculação ou intervalo. Padrão 0. O valor de telemetria do LQI pode ser usado como um guia para ajustar a opção de protocolo de frequência fina.
** AD2GAIN **: O valor de telemetria VOLT2 (entrada AIN no X4R) é multiplicado por este valor dividido por 100. Permite o ajuste para a rede divisora externa do resistor. Padrão 100 (ganho de 1). O intervalo é de 1 a 2000 (ganho de 0,01 a 20,00).
** Failsafe **: As opções do Frsky failsafe são totalmente suportadas. Se o canal FailSafe (na configuração do canal do mixer) estiver configurado, este valor será enviado ao receptor a cada 9 segundos. O receptor usará esses valores no modo à FailSafe, a menos que a opção de protocolo esteja configurada como RX.
** Format **: defina o formato para corresponder ao firmware no receptor. Tanto a FCC como a UE. A versão européia é compatível com o firmware Frsky LBT, mas não realiza o teste LBT.
** RSSIChan **: Quando definido como LastChan, o RSSI recebido será transmitido no último canal de rádio. O último canal é baseado na configuração de # de canais no modelo. O valor do canal é o valor RSSI recebido multiplicado por 21.
** S.Port out **: quando habilitado, os pacotes s.port recebidos são ecoados para a porta do instrutor e a voz estendida é desabilitada.
Bind Mode: The bind mode will control which channels will be connected to the receiver PWM outputs and allow to enable or disable the receivers telemetry during bind.
Version: This will switch between FrSkyX V1.x.x and V2.1.x protocol version.
Para os canais com FailSafe setados como desativados, a opção de protocolo padrão “Safe”, Failsafe, comanda o receptor a manter os últimos valores de canal recebidos quando o receptor entra no modo à prova de falhas. A configuração “NoPulse” faz com que o receptor não envie nenhum sinal nas saídas do PPM (o teste no X8R mostrou que os valores da SBUS foram para o mínimo, mas o comportamento da SBUS não é especificado pelo protocolo). A configuração “RX” evita que o desvio envie configurações de proteção contra falhas para que o receptor use os valores à prova de falhas armazenados no receptor.
Quando S.Port Out está habilitado o PPMIn não é usado, pacotes S.Port recebidos são enviados pela porta do instrutor. A taxa de bits é 57600 para compatibilidade com os decodificadores S.Port, mas o sinal deve ser invertido para se conectar a um decodificador padrão. Ele pode ser conectado diretamente à entrada de um adaptador de 3.3V.
10.17. Frsky and FrskyX Extended Telemetry¶
A telemetria estendida refere-se aos sensores de telemetria hub e S.Port Frsky. Esses sensores são suportados em todos os transmissores, exceto o 7e. Eles estão disponíveis nas páginas de teste de telemetria e nas caixas de página principal.
A telemetria FrskyX S.Port permite conectar até 16 sensores do mesmo tipo (por exemplo, voltagem da bateria). O Deviation suporta vários sensores do mesmo tipo, mas apenas um valor de telemetria é salvo. O valor mais recentemente recebido de todos os sensores do mesmo tipo é relatado.
Os valores de telemetria são redefinidos com o pressionamento longo do botão Para cima durante a exibição da página do monitor de telemetria. Para a telemetria de Frsky, isso redefine o “nível do solo” de altitude de variância para o próximo valor de telemetria recebido, o que zera o valor da telemetria de variação de altitude. Também repõe o acumulador de descarga da bateria e a tensão mínima da célula. O valor do nível do solo é salvo no arquivo de modelo para salvar a configuração através de ciclos de energia - o valor é razoavelmente constante durante um único dia de vôo em ar estável.
Telemetry test page
As tabelas a seguir mostram o layout da exibição da página de teste de telemetria.
| Devo10 | ||
|---|---|---|
| Misc | t | Cells |
| RSSI | VOLT1 | CELL1 |
| TEMP1 | VOLT2 | L2 |
| TEMP2 | LT3 | CELL3 |
| RPM | MINCELL | LL4 |
| UEL | ALLCELL | CELL5 |
| ALTITUDE | VOLTA | CELL6 |
| RIO | CURRENT | DISCHARGE |
| LQI | LRSSI | |
| Devo7e | ||
|---|---|---|
| Misc | t | Signl |
| RSSI | VOLT1 | LQI |
| VOLT2 | LRSSI | |
O valor de ALTITUDE é relatado como acima do nível do solo. O nível do solo é definido para o valor de telemetria da primeira leitura de altitude recebida no ser ligada a controladora
O LQI (Link Quality Indicator) e o LRSSI (Local RSSI) indicam a qualidade e a quantidade do sinal de telemetria do receptor. O LQI pode ser usado como um guia para ajustar a opção de protocolo de frequência fina. O LQI inferior é melhor e valores abaixo de 50 são típicos. As unidades LRSSI são (aproximadamente) dBm.
Valores derivados: MINCELL é o valor CELL mais baixo relatado. ALLCELL é o total de todos os valores de CÉLULA relatados. A descarga é a quantidade total de descarga da bateria em miliAmp-horas.
10.18. Protocolo: *Skyartec¶
O protocolo Skyartec é usado para controlar os receptores e modelos Skyartec ™. | nota do cc2500 |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo Skyartec suporta até 7 canais, não suporta Bind automático. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
10.19. Protocolo: *Futaba S-FHSS¶
O protocolo Futaba S-FHSS é usado para controlar receptores e modelos Futaba ™. Ele também é usado por alguns modelos da XK Innovations e possui receptores compatíveis de terceiros disponíveis. | nota do cc2500 |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo S-FHSS suporta até 8 canais e suporta apenas Bind automático. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
O layout do canal Futaba tradicional é o seguinte: Aileron, Elevador, Acelerador, Leme, Engrenagem, Afinação, Aux1 e Aux2. Por isso, é adequado para o controle de helicópteros de Pitchet (CP).
A resolução do protocolo é de 1024 passos (10 bits), dos quais um intervalo um pouco menor é realmente usado (dados por engenharia reversa usando equipamentos de terceiros). Resolução temporal é 6,8ms. Não há telemetria suportada.
10.20. Protocolo: *Corona¶
O protocolo Corona suporta os receptores Corona V1 e V2 e os receptores Flydream V3. | nota do cc2500 | | mod-install-link |
Todos os protocolos suportam até 8 canais. A ordem de canal padrão é AETR. Nenhuma telemetria nos protocolos.
As seguintes opções de protocolo estão disponíveis.
** Formato **: Seleção de protocolo. Use V1 e V2 com receptores Corona. Use o FDV3 para o Flydream V3.
** Freq-fine **: Ajuste de desvio de frequência. Intervalo -127 a 127. Ajusta as variações entre os módulos CC2500. Normalmente, o deslocamento de 0 ou -41 é necessário, mas o intervalo completo deve ser testado se houver problemas com a vinculação ou intervalo. Padrão 0
10.21. Protocolo: *Hitec¶
O protocolo Hitec suporta receptores Optima e Minima. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo suporta até 9 canais. A ordem dos canais padrão é AETR. Suportada telemetria usando o layout da Frsky. Os seguintes valores são suportados: VOLT1, VOLT2, CURRENT, TEMP1, TEMP2, COMBUSTÍVEL, RPM, LRSSI, LQI e GPS (latitude, longitude, altitude, velocidade, direção). Receiver RSSI não está disponível neste protocolo.
As seguintes opções de protocolo estão disponíveis.
Format: Seleção do receptor para Optima ou Minima.
** Freq-fine **: Ajuste de desvio de frequência. Intervalo -127 a 127. Ajusta as variações entre os módulos CC2500. Normalmente, o deslocamento de 0 ou -41 é necessário, mas o intervalo completo deve ser testado se houver problemas com a vinculação ou intervalo. Padrão 0
10.22. Protocolo: *V202¶
O protocolo V202 suporta o quadracóptero WLToys V202. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo V202 suporta até 12 canais, não suporta Bind automático. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
Os canais da 1 a 4 representam o Aileron, o Elevator, o Throttle e o Rudder. Canais adicionais controlam as funções especiais do quadricopter:
- Canal 5 controla a velocidade do Blink
- Canal 6 permite o modo “flip”
- O canal 7 faz fotografias estáticas
- Canal 8 liga / desliga o vídeo
- O canal 9 ativa / desativa o modo sem cabeça
- Canal 10 faz com que o eixo x seja calibrado
- O canal 11 faz com que o eixo y seja calibrado
Se o formato JXD-506 for selecionado, os canais 10-12 serão usados para:
- Canal 10 armar/desarmar
- Canal 11 parada de emergência
- Canal 12 controle do gimbal
Além disso, modelos compatíveis com este formato exigem que o acelerador seja centrado antes de armar.
10.23. Protocolo: *SLT¶
O protocolo SLT é usado para controlar os receptores TacticSLT / Anylink. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo SLT suporta até 6 canais e suporta apenas Bind automático. O ID fixo pode ser usado, mas não impede o Bind automático durante a inicialização.
10.24. Protocolo: *HiSky¶
O protocolo HiSky é usado para controlar os modelos da marca HiSky junto com os modelos WLToys v922 v955. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo HiSky suporta até 7 canais, não suporta Bind automático. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
10.25. Protocolo: *YD717¶
O protocolo YD717 suporta os quadricópteros YD717 e Skybotz UFO Mini, além de vários modelos da Sky Walker, XinXun, Ni Hui “) e Syma através de opções de protocolo. Consulte a planilha de módulos suportados para obter uma lista completa. Nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo YD717 suporta 9 canais e suporta apenas Bind automático. O protocolo permanece no modo de Bind até ser bem sucedido.
Os primeiros quatro canais representam o Aileron, o Elevator, o Throttle e o Rudder.
O quinto canal ativa a função de inversão automática quando maior que zero. Além disso, para ativar as inversões automáticas para a esquerda e para a direita, a escala do canal do Aileron deve ser 87 ou superior. Da mesma forma para o canal do Elevator e frente / trás dos flips. Quando o flip automático está ativado, mover o ciclico em qualquer direção inicia um movimento nessa direção. O YD717 requer pelo menos quatro segundos entre cada inversão automática.
O sexto canal aciona as luzes quando maior que zero
O sétimo canal tira uma foto na transição de negativa para positiva.
O oitavo canal inicia / pára a gravação de vídeo em cada transição positiva.
O nono canal é atribuído ao último sinalizador de recursos disponível no protocolo. Isso pode controlar o modo sem cabeça em modelos que possuem o recurso.
10.26. Protocolo: *SymaX¶
Este protocolo é usado nos modelos da Syma: X5C-1, X11, X11C, X12, X4 novo e X6 novo. Uma variante que suporta o X5C original e o X2 está incluída como uma opção de protocolo. (O Syma X3, o antigo X4 e o antigo X6 são suportados com a opção SymaX4 no protocolo YD717.) Consulte a planilha de Módulos Suportados para obter uma lista completa. | nrf24l01p-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo SymaX suporta 9 canais e suporta apenas ligação automática.
Os primeiros quatro canais representam o Aileron, o Elevator, o Throttle e o Rudder.
O quinto canal não é usado.
O sexto canal ativa a função de inversão automática quando maior que zero.
O sétimo canal tira uma foto quando o canal se move de negativo para positivo.
O oitavo canal inicia / pára a gravação de vídeo em cada transição positiva.
O nono canal ativa o modo sem cabeça quando positivo.
10.27. Protocol:o *Hontai¶
Este protocolo é usado nos modelos Hontai F801 e F803.
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the “plus” version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Os primeiros quatro canais representam o Aileron, o Elevator, o Throttle e o Rudder. Canais adicionais controlam funções especiais:
- O canal 5 não é utilizado
- Canal 6 permite a função flip
- Canal 7 tira uma foto em transição positiva através de zero
- Canal 8 liga e desliga vídeo em transição positiva
- O canal 9 ativa / desativa o modo sem cabeça
- Canal 10 envolve o recurso de retorno para casa
- Canal 11 inicia calibração
10.28. Protocolo: *Bayang¶
Este protocolo é utilizado nos BayangToys X6, X7, X8, X9, X16, Boldclash B03, JJRC / Eachine E011, H8, H9D v2, H10, Floureon H101, JJRC JJ850, JFH H601 e H606 (formato normal).
Este protocolo é usado no BayangToys X16 com retenção de altitude (formato X16-AH).
Este protocolo é usado no IRDRONE Ghost X5 (formato IRDRONE).
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the “plus” version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Os primeiros quatro canais representam o Aileron, o Elevator, o Throttle e o Rudder. Canais adicionais controlam funções especiais:
- Canal 5 ativa LEDs ou vôo invertido (Floureon H101)
- Canal 6 permite a função flip
- Canal 7 captura foto única em transição positiva
- Canal 8 inicia / pára a gravação de vídeo em transição positiva
- O canal 9 ativa / desativa o modo sem cabeça
- Canal 10 envolve o recurso de retorno para casa
- Canal 11 permite decolar / pousar
- Canal 12 ativa parada de emergência
- Canal 13 auxiliar analógico canal #1
- Canal 14 auxiliar analógico canal #2
** NOTA: Os canais 13 e 14 só estão ativos quando se usa o firmware ** Silverware da NFE <https://github.com/NotFastEnuf/NFE_Silverware/> `_ ** (e alguns outras versões de Silverware). Dois bytes de outra forma estáticos no protocolo anulados para adicionar dois canais auxiliares ‘analógicos’ (não binários). A opção do protocolo “Analog Aux” Bayang deve estar ativada no TX e o firmware do Silverware deve ter o recurso Analog Aux ativado. Incompatibilidades entre as configurações TX e RX impedem a vinculação. **
10.29. Protocolo: *FY326¶
Este protocolo é usado no FY326 red board.
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the “plus” version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Os primeiros quatro canais representam o Aileron, o Elevator, o Throttle e o Rudder. Canais adicionais controlam funções especiais:
- O canal 5 não é utilizado
- Canal 6 permite a função flip
- O canal 7 não é usado
- O canal 8 não é usado
- O canal 9 ativa / desativa o modo sem cabeça
- Canal 10 envolve o recurso de retorno para casa
- Canal 11 inicia calibração
10.30. Protocolo: *CFlie¶
O protocolo CFlie é usado no quad nano CrazyFlie. Não foi testado com nenhum outro modelo. | nrf24l01p-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo CFlie suporta até 4 canais, não suporta Bind automático. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso
10.31. Protocolo: *H377¶
O protocolo H377 suporta o helicóptero de 6 canais NiHui H377. Não foi testado com nenhum outro modelo. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo H377 suporta até 7 canais, não suporta Bind automático. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
10.32. Protocolo: *HM830¶
O protocolo HM830 suporta o avião dobrável de papel A4 HM830. Não foi testado com nenhum outro modelo. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo HM830 suporta 5 canais e suporta apenas ligação automática. O protocolo permanece no modo de Bind até ser bem sucedido.
10.33. Protocolo: *KN¶
O protocolo KN é usado nos helicópteros WLToys V930, V931, V966, V977 e V988 (formato WLToys), bem como nos helicópteros Feilun FX067C, FX070C e FX071C (formato Feilun). Não foi testado com outros modelos. | nrf24l01p-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo KN suporta até 11 canais e não suporta Bind automático. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
Os canais 1-4 são acelerador, aileron, elevador e leme. O canal 5 ativa a taxa dupla integrada do modelo. O canal 6 ativa o acelerador. Canal 7 ativa ocioso (WL Toys V931, V966 e V977 apenas). O canal 8 alterna entre 6G (padrão) e estabilização 3G. Canal 9-11 são canais de ajuste para acelerador / passo, elevador e leme.
10.34. Protocolo: *ESky150¶
O protocolo ESky150 suporta os modelos ESky menores a partir de 2014 (150, 300, 150X). Não foi testado com nenhum outro modelo. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo Esky150 suporta até 7 canais e não suporta Bind automático. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
Os canais 1-4 são acelerador, aileron, elevador e leme. O canal 5 é o modo de voo (comutador de 1 bit com apenas dois estados). O canal 6 ainda não é usado em nenhum dos modelos testados. O canal 7 é um comutador de 2 bits (4 estados).
É importante que você tenha um modelo de 4 canais e que seja configurado para somente 4 canais e nada mais, caso contrário os valores de aceleração podem ficar simplesmente loucos.
10.35. Protocolo: *Esky¶
Precisa ser concluído. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo Esky suporta até 6 canais, não suporta auto-Bind. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
10.36. Protocolo: *BlueFly¶
O protocolo BlueFly é usado com o Blue-Fly HP100. Não foi testado com nenhum outro modelo. | nrf24l01p-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo BlueFly suporta até 6 canais, não suporta Bind automático. Se o ID fixo estiver definido como Nenhum, será usado um ID específico do transmissor. É necessário Bindar manualmente cada modelo antes do primeiro uso.
10.37. Protocolo: *CX10¶
O formato CX10 suporta o quadcopter Cheerson CX10. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo CX10 suporta 9 canais e suporta apenas Bind automático. O protocolo permanece no modo de Bind até ser bem sucedido. Os primeiros quatro canais são o Aileron, o Elevator, o Throttle e o Rudder.
O canal 5 é a taxa, exceto no CX-10A, onde é o modo sem cabeça.
Canal 6 é o flip
O formato DM007 também usa o canal 7 para a câmera fotográfica, o canal 8 para a câmera de vídeo e o canal 9 para o modo sem cabeça.
O protocolo tem uma opção de formato para os quadcopters Blue-A, Green, DM007, Q282, JC3015-1, JC3015-2, MK33041 e Q242.
10.38. Protocolo: *CG023¶
O protocolo CG023 suporta os quadcopters Eachine CG023 e 3D X4. Não foi testado em outros modelos. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo CG023 suporta 9 canais e aceita apenas Bing automático.
Os primeiros quatro canais são o Aileron, o Elevator, o Throttle e o Rudder.
Canal 5 controla os LEDs.
Canal 6 controla o modoFflip.
Canal 7 controla a câmera fotográfica
Canal 8 controla a câmera de vídeo
Canal 9 controla o modo sem cabeça
O protocolo tem o formato para o quadcopter YD829.
10.39. Protocolo: *H8_3D¶
O protocolo H8_3D suporta os quadcopters Eachine H8 3D, JJRC H20 e H11D. Não foi testado em outros modelos. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo H8_3D suporta 11 canais e suporta apenas Bind automático.
Os primeiros quatro canais são o Aileron, o Elevator, o Throttle e o Rudder.
Canal 5 controla os LEDs.
Canal 6 controla o modoFflip.
Canal 7 controla a câmera fotográfica
Canal 8 controla a câmera de vídeo
Canal 9 controla o modo sem cabeça
Canal 10 aciona o RTH
O canal 11 controla o gimbal da câmera no H11D com 3 posições.
Ambos os sticks posicionados no canto inferior esquerdo iniciam a calibração do acelerômetro no H8 3D ou a calibração sem cabeça no H20.
Ambos os sticks no canto inferior direito iniciam a calibração do acelerômetro no H20 e H11D.
10.40. Protocolo: *MJXq¶
O protocolo MJXq suporta os quadricopters MJX. Também tem opções de formato para Weilihua WLH08, EAchine E010 e JJRC H26D / H26WH. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo MJXq suporta 12 canais e suporta apenas Bind automático.
Os primeiros quatro canais são o Aileron, o Elevator, o Throttle e o Rudder.
O canal 5 controla os LEDs ou armar se o formato H26WH estiver selecionado.
Canal 6 controla o modoFflip.
Canal 7 controla a câmera fotográfica
Canal 8 controla a câmera de vídeo
Canal 9 controla o modo sem cabeça
O canal 10 aciona o modo RTH
O canal 11 controla o autoflip (formatos X600 e X800) ou o pan da câmera
O canal 12 controla o Tilt da camera
10.41. Protocolo: *Bugs3Mini¶
O protocolo Bugs3Mini é usado para controlar drones MJX Bugs3 Mini e Bugs 3H. | nrf24l01-note |
Para Bind primeiro selecone o protocolo Bugs3Mini e clique em Bind. Em seguida, energize o drone. A caixa de diálogo do Bind desaparecerá se a ligação for bem-sucedida.
Canais usados para controlar funções. Defina o valor do canal maior que zero para ativar.
- Arming é controlado pelo Canal 5
- Luzes é controlado pelo Canal 6
- Flip é controlado pelo Canal 7
- Camera é controlada pelo Canal 8
- Vídeo é controlado pelo Canal 9
- Angle/Acro são controlados pelo Canal 10 (>0 é considerado Angulo)
A telemetria é suportada por RSSI e alarme de voltagem. Ele usa a tela de telemetria Frsky com a intensidade do sinal informada no campo RSSI e a voltagem da bateria em VOLT1. O receptor Bugs3 Mini reporta apenas Boa / Aviso / Baixa Tensão. Isso se traduz em valores de VOLT1 de 8,40V para bom, 7,10V para aviso e 6,40V para baixa tensão.
10.42. Protocolo: *E012¶
O protocolo E012 é usado para controlar o drone Eachine E012. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo E012 suporta 10 canais e aceita apenas ligação automática.
Os primeiros quatro canais são o Aileron, o Elevator, o Throttle e o Rudder.
- Flip é controlado pelo Channel 6
- O modo sem cabeça é controlado pelo canal 9
- O modo RTH é controlado pelo canal 10
10.43. Protocolo: *E015¶
O protocolo E015 é usado para controlar o Eachine E015 quad / car / boat. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo E015 suporta 10 canais e aceita apenas ligação automática.
Os primeiros quatro canais são o Aileron, o Elevator, o Throttle e o Rudder.
- Arming é controlado pelo Canal 5
- Os LEDs são controlados pelo canal 6
- Flip é controlado pelo Canal 7
- O modo sem cabeça é controlado pelo canal 9
- O modo RTH é controlado pelo canal 10
10.44. Protocolo: *NCC1701¶
O protocolo NCC 1701 é usado para controlar o drone Air Hogs Star Trek NCC-1701. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo NCC1701 suporta 5 canais e apenas o bind automático.
Os primeiros quatro canais são o Aileron, o Elevator, o Throttle e o Rudder.
- O Warp é controlado pelo canal 5
10.45. Protocolo: *V911S¶
O protocolo V911S é usado para controlar o helicóptero WL Toys V911-S. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo V911S suporta 5 canais. O receptor deve fazer o bind manualmente uma única vez, usando o botão “Bind”, após o qual ele deve permanecer vinculado.
Os primeiros quatro canais são o Aileron, o Elevator, o Throttle e o Rudder.
- A calibração é controlada pelo canal 5
10.46. Protocolo: GD00X¶
O protocolo GD00X é usado para controlar as asas fixas C17 C-17 Transport e GD006 Diamond DA62. | nrf24l01-note |
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo GD00X suporta 5 canais e suporta apenas Bind automático.
Os primeiros quatro canais são o Aileron, Elevator, Throttle e o Rudder. Somente os canais de Throttle e Aileron são usados pelo modelo.
- As luzes são controladas pelo canal 5
10.47. Protocolo: *LOLI¶
O protocolo LOLI é usado para controlar os populares receptores DIY nRF24L01. | nrf24l01-note|
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo LOLI suporta 8 canais. O destinatário deve ser vinculado manualmente uma única vez usando o botão “Bind”, após o qual ele deve permanecer vinculado.
Modos de saída do receptor são configuráveis através de opções de protocolo.
Os primeiros quatro canais são o Aileron, o Elevator, o Throttle e o Rudder.
As configurações failsafe são suportadas.
Aceita Telemetria
10.48. Protocolo: *E016H¶
O protocolo E016H é usado para controlar o drone Eachine E016H. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
O protocolo E016H suporta 8 canais e suporta apenas bind automático.
Os primeiros quatro canais são o Aileron, o Elevator, o Throttle e o Rudder.
- Flips são controlados pelo Canal 5
- O modo headless é controlado pelo canal 6
- O modo RTH (One Key Return - Return to Home) é controlado pelo Canal 7
- Parada de emergência é controlada pelo Canal 8
10.49. Protocolo: PPM¶
O protocolo PPM é usado para gerar o PPM na porta do instrutor. Ele desativa todas as transmissões de rádio. O PPM é útil para conectar a simuladores ou outros módulos de rádio que se conectam à porta do instrutor. O ID fixo não tem efeito e não há bindagem associada a esse protocolo.
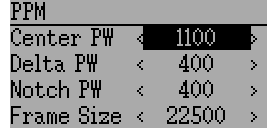
Opções configuráveis na página PPM:
- ** Centro PW **: Define o tempo (em µsec) do pulso que o transmissor envia para representar a posição centralizada do servo. Se esse número não corresponder ao transmissor mestre, os servos não serão centralizados.
- ** Delta PW **: Define a largura do pulso (medido a partir do centro) enviado pelo transmissor para definir o limite máximo do servo. Se este valor estiver incorreto, os servos não atingirão o alcance total (ou irão girar muito e sem controle)
- ** Notch PW **: Define o delay entre os canais.
- ** Tamanho do Quadro **: Define o tempo total para que todos os canais sejam acionados
- Polaridade: Define a polaridade do sinal, O padrão é o baixo.
O Deviation não detecta automaticamente quando um cabo de instrutor é conectado ao transmissor. Para usar o Deviation com um simulador (como o Phoenix por exemplo), crie um novo modelo, nomeie-o adequadamente e selecione PPM como o protocolo. Use o botão Re-Init ou desligue e religue o transmissor para ativar o PPM.
10.50. Protocolo: USBHID¶
O protocolo USBHID converterá o transmissor em um joystick USB. Conectar o transmissor a um PC via cabo USB permitirá que o transmissor seja detectado como um joystick pelo computador. Isso permite que o transmissor controle qualquer simulador que suporte a entrada por joystick. Alguma calibração inicial pode ser necessária e é realizada através do applet do painel de controle do seu sistema operacional e/ou simulador.
10.51. Protocolo: SBUS¶
O protocolo SBUS envia dados seriais na porta de treinamento do transmissor (conector de ponta). O link entre os dois permanece desligado. No transmissor T8SG PLUS, os dados seriais também aparecem no pino superior no conector do módulo JR. Os dados seriais não estão invertidos, portanto, um adaptador pode ser necessário para alguns equipamentos SBUS. Até dezesseis canais são suportados. A taxa de dados é de 100kbps. Formato é 8 bits de dados, paridade par, dois bits de parada.
10.52. Protocool: CRSF (Crossfire)¶
O protocolo CRSF envia dados seriais no padrão Crossfire na porta de treinamento do transmissor. O link estará desligado. No transmissor T8SG PLUS, os dados seriais também aparecem no pino superior do conector do módulo JR. Para ativar a telemetria, a entrada serial deve estar vinculada à saída serial. No compartimento do módulo T8SG, junte os pinos superior e inferior. Até dezesseis canais são suportados.
As operações de Bind e configuração de CRSF ainda não são suportadas. Use um PC para ligar o módulo Crossfire e o receptor antes de usar com o Deviation.
A telemetria não está disponível em transmissores de pouca memória (7e, F4, F12).
Telemetry test page
As tabelas a seguir mostram o layout da exibição da página de teste de telemetria.
| Devo10 | ||
|---|---|---|
| RX | TX | t |
| RxRSSI | TxRSSI | VBATT |
| RASSI1 | TxPOWER | CURRENT |
| RxSNR | TxSNR | CAPACITY |
| RxQUAL | TxQUAL | FMODE |
| PITCH | ROLL | AW |
| RFMODE | ||
10.53. Protocolo: PXX¶
O protocolo PXX é uma interface serial para seus módulos transmissores da Frsky. Principalmente usado nos módulos R9M e XJT na baia JR do T8SG Plus, mas o protocolo está disponível na porta serial de outros transmissores também.
Até 16 canais são suportados. Telemetria (S.Port) é suportada no formato Frsky para a maioria dos transmissores. Devido a restrições de memória, a telemetria não está disponível em compilações modulares. A operação de verificação de faixa é suportada. A configuração de potência do módulo é exibida como FCC/EU (por exemplo, 100/25mW).
O ID fixo é suportado para ligar o transmissor a receptores específicos. O ID fixo corresponde ao número do receptor no OpenTX para facilitar o compartilhamento. Os valores de 0 a 63 são válidos. IDs fixos acima de 63 serão truncados para o intervalo válido.
As seguintes opções de protocolo estão disponíveis.
Failsafe: Se o canal à prova de falhas (na configuração do canal do mixer) estiver configurado, este valor é enviado ao receptor a cada 9 segundos. O receptor usará esses valores no modo failsafe, a menos que a opção de protocolo esteja configurada como RX. Para canais com failsafe desativados, a opção de protocolo de segurança sera “Hold” que comanda o receptor a manter os últimos valores de canal recebidos antes do receptor entrar em modo failsafe. A configuração “NoPulse” faz com que o receptor não envie nenhum sinal nas saídas do PPM (o teste no X8R mostrou que os valores da SBUS ficaram no mínimo, mas o comportamento da SBUS não foi especificado pelo protocolo). A configuração “RX” impede que o Deviation envie os comandos de failsafe para o receptor e este user qualquer valor de failsafe armazenado previamente no receptor.
País: Defina o país que corresponde ao firmware no receptor. As opções são EUA, JP, UE.
Rx PWM out: Escolha se as saídas PWM do receptor que são canais 1-8 ou 9-16.
Rx Telem: liga ou desliga a telemetria do receptor.
Para transmissores sem módulo JR, o sinal PXX estará disponível na saída da porta serial. Este é normalmente o jack de treino, exceto no Devo12. Use um plugue estéreo. Dica: será a saída PXX e ring é a entrada s.port. A capa é o polo negativo.
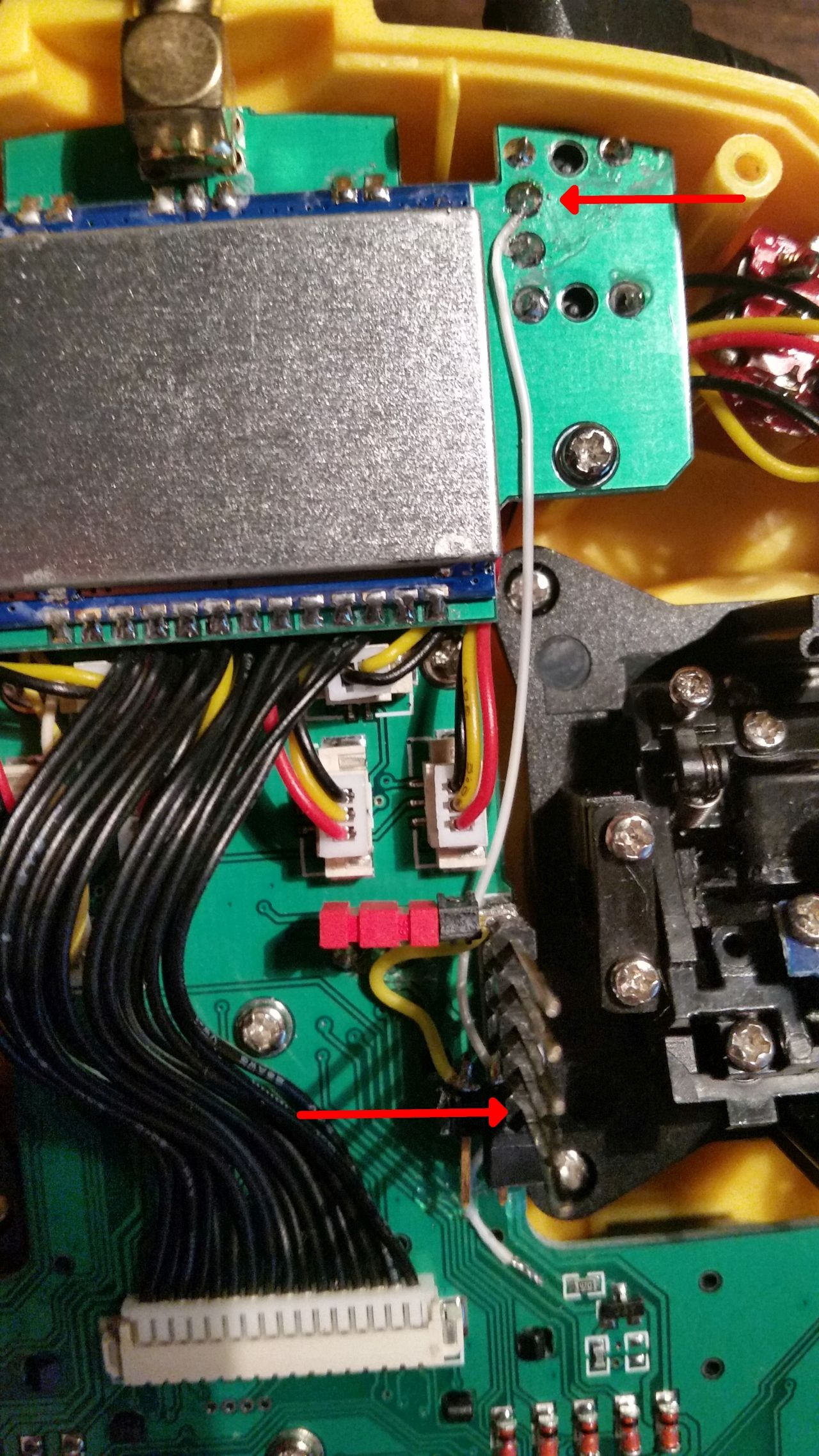
O T8SG V2 Plus requer uma modificação de hardware para receber telemetria de um módulo padrão JR. O anel da porta do treinador deve estar conectado ao pino JR inferior (veja a imagem).