9. 协议¶
有些协议有额外的配置和限制。每个协议的描述见下文。遥控器上的显示中,星号是指 Deviation 固件没有检测到所需的硬件模块(未安装,或者 hardware.ini 文件不正确,或模块通信有其他 的问题)更多信息可在模块安装指南中找到:
http://www.deviationtx.com/wiki/#hardware_modifications
9.1. 协议:DEVO¶
DEVO 协议用于支持华科尔 DEVO 接收机/模型。该协议支持多达 12 个通道。DEVO 协议支持自动对频和手动对频。如果固定 ID 设置为“无”时,遥控器每次 开机时将尝试与接收机自动对频。如果固定 ID 被设置为一个值,当需要配对接 收机时必须通过使用“对频”按钮,手动对频一次。需要注意的是固定 ID 是对 频过程必须的操作。两个遥控器使用相同的 ID 无法控制相同的模型。
The DEVO protocol also supports enabling/disabling the telemetry capability. This option is accessed by pressing the Protocol spin-box when DEVO is shown. The options are Std (standard format), X350 (Walkera QR-X350 format), and Off.
以下功能 Devo遥控器是可用的。请注意,并非所有型号/接收机会传回所有 信息,而且有些信息需要添加额外的模块来实现。
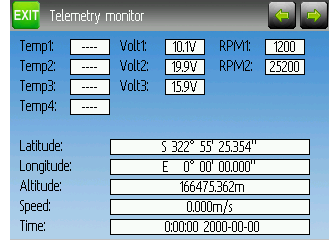
- 温度 1/2/3/4:温度读数,这些可以是电池、电机、或环境值
- 电压 1/2/3:接收机电池和外部电池电压读数
- 转数 1/2:电机/螺旋桨转数值
- GPS数据:GPS模块当前位置,速度和高度
9.2. 协议:WK2801¶
WK2801协议用于控制较老款华科尔。以前华科尔模型分成 3种相似但不完 全相同的协议:WK2801,WK2601,WK2401。这大致对应于所支持的通道数,但 许多新的 6 通道接收机实际上支持 WK2801 协议。建议与老款华科尔接收机WK2601 或 WK2401 对频之前,先尝试 WK2801 协议,因为 WK2801 是一个更好 的协议。WK2801 协议支持最多 8 个通道,并且可以自动对频和手动对频。如果 固定 ID 设置为“无”时,遥控器每次开机时将尝试与接收机自动对频。如果固 定 ID 被设置为一个值,需要配对的接收机必须通过使用“对频”按钮,手动对 频一次。
9.3. 协议:WK2601¶
WK2601协议用于控制较老款华科尔。以前华科尔模型分成 3种相似但不完 全相同的协议:WK2801,WK2601,WK2401。这大致对应于所支持的通道数,但 许多新的 6 通道接收机实际上支持 WK2801 协议。建议与老款华科尔接收机WK2601 或 WK2401 对频之前,先尝试 WK2801 协议,因为 WK2801 是一个更好 的协议。WK2601 协议支持多达 7 个通道,并且只支持自动对频。固定 ID 可以 使用,但通电期间不能使用自动对频。
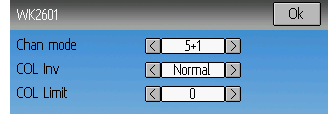
WK2601协议还支持其他选项。选择框为 WK2601时按下ENT键,访问 此选项:
通道模式:设置通道如何运行:
- 5+1:AIL,ELE,THR,RUD,GYRO(CH 7)是成比例的。Gear(CH 5)是二 进制的。CH6 被禁用。
- 直升机:AIL,ELE,THR,RUD,GYRO 是成比例的。Gear(CH 5)是二进制 的。螺距(CH 6)与 THR 连接。如果 CH6大于等于 0,则接收机将提供一个适合的3D 曲线给 THR。如果 CH6 小于0,则接收机将提供一个正常曲线给 THR。CH6的值定义 THR 通道的螺距比率。
- 6+1:AIL,ELE,THR,RUD,COL(CH 6),GYRO(CH 7)是成比例的。Gear(CH 5)是二进制的。这种模式是高度实验性的。
- 螺距方向:反转螺距舵机
- 螺距:设定螺距舵机的最大范围
9.4. 协议:WK2401¶
WK2401协议用于控制较老款华科尔接收机。以前华科尔模型分成 3种相似 但不完全相同的协议:WK2801,WK2601,WK2401。这大致对应于所支持的通道 数,但许多新的 6 通道接收机实际上支持 WK2801 协议。建议与老款华科尔接 收机 WK2601 或 WK2401 对频之前,先尝试 WK2801 协议,因为 WK2801 是一 个更好的协议。WK2401 协议支持多达 4 个通道,并且只支持自动对频。固定 ID可以使用,但通电期间不能使用自动对频。
9.5. 协议:DSM2¶
DSM2 协议被用于控制 Spektrum™ 和 JR™的接收机,以及使用这种协议的其他模型。DSM2 协议可以支持多达 12 个通道。请注意,许多接收机少于 8 个通 道,需要遥控器发送 7个或更少的通道。确保接收机的通道数设置适当。DSM2不支持自动绑定。如果固定 ID被设置为无,遥控器会用特定的 ID来代替。需要 在第一次使用模型之前手动对频。
请注意,在移动 AIL 或 ELE 摇杆之前,对频不会退出。因此,您可以按下 DSM接收器上的失控保护按钮来设置失控保护值。
DSM2协议还支持启用/禁用双向回传功能。选择框为 DSM2时按下ENT键, 访问此选项。
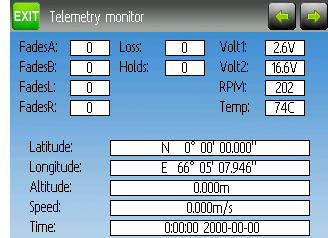
以下功能 DSM2 遥控器是可用的。需要注意的是获得这些数据需要专用的回 传模块和额外的传感器。
- FadesA/B/L/R:每个天线接收到的弱信号数量。理想的情况是,这些数字都 应该是相似的,这表明每个天线都接收到信号。
- 丢失:出现完整的信号丢失(丢失帧)的次数。
- Holds: The number of times the receiver entered fail-safe mode due to loss of signal
- Volt1/2: Battery voltage for receiver and an external source
- RPM: Engine/Motor speed
- Temp: Temperature from external temperature sensor
- GPS数据:GPS模块当前位置,速度和高度
9.6. 协议:DSMX¶
DSMX 协议被用于控制 Spektrum™ 和 JR™的接收机,以及使用这种协议的其他模型。DSM2 协议可以支持多达 12 个通道。请注意,许多接收机少于 8 个通 道,需要遥控器发送 7个或更少的通道。确保接收机的通道数设置适当。DSMX不支持自动绑定。如果固定 ID被设置为无,遥控器会用特定的 ID来代替。需要在第一次使用模型之前手动对频。
请注意,在移动 AIL 或 ELE 摇杆之前,对频不会退出。因此,您可以按下 DSM接收器上的失控保护按钮来设置失控保护值。
注意,不像 Spektrum™ 或 JR™或遥控器,Deviation 不会自动在 DSM2 和DSMX 协议之间进行选择。用户必须要手动选择使用的协议。
DSMX协议支持启用/禁用双向回传功能。选择框为 DSMX时按下ENT键,访 问此选项。
DSMX 回传功能列表与 DSM2 协议相同,详情请见协议:ref:protocol-dsm2。
9.7. 协议:J6Pro¶
J6Pro 协议用于九鹰(Nine Eagles™ )模型。只有能与 J6Pro 遥控器对频的模 型可以使用。许多老的 4 通道九鹰模型中使用的是不同的协议,这是不支持的。J6Pro协议支持多达 12个通道,当前只测试过6个通道。J6Pro不支持自动对 频。如果固定 ID 被设置为无,遥控器会用特定的 ID 来代替。需要在第一次使用 模型之前手动对频。
9.9. 协议: *Flysky¶
Flysky 协议被用于控制 Turnigy / Flysky 接收机以及其它几个使用 AFHDS 协议的模型(WL V911,Xieda 9958 等)。NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Flysky 协议支持多达 12 个通道,并且支持自动对频和手动对频。如果固定ID 设置为“无”时,遥控器每次开机时将尝试与接收机自动对频。如果固定 ID被设置为一个值,需要配对的接收机必须通过使用“对频”按钮,手动对频一次。
Flysky协议还支持 WLToys扩展的协议。选择框为 Flysky时按下ENT键,访问此选项。
V9x9:WLToys V939,V949,V959,V969 等四轴飞行器的扩展通道。
- 灯由通道 5控制
- 摄像由通道 6控制
- 相机由通道 7控制
- 翻转由通道 8控制
V6x6:WLToys V636 和 V686 四轴飞行器的扩展通道。
- 灯由通道 5控制
- 翻转由通道 6控制
- 相机由通道 7控制
- 摄像由通道 8控制
- 无头模式由通道 9 控制
- 回家模式由通道 10 控制
- X和 Y校准通过通道 11和 12分别控制
V912:V912,V913 和 V915 直升机的扩展通道
请注意,如果这些通道被分配到一个开关,将开关拨到一边触发,将开关拨回不 会有任何影响。因此如果要打开灯,将分配给通道 5的开关从 OFF拨到 ON。 开关拨回到 OFF 时没有任何效果。现在再将开关拨到 ON,灯光关闭。
9.10. 协议: *AFHDS-2A¶
AFHDS-2A 的协议用来控制 Turnigy / Flysky 的 AFHDS 2A 接收机。NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
AFHDS-2A 协议支持多达 14 个通道,并且需要手动对频。需要配对的接收机 必须通过使用“对频”按钮,手动对频一次。
AFHDS-2A 页面上的设置:
- 输出:设置接收机的输出类型,PWM + IBUS,PPM + IBUS,PWM + SBUS 或PPM + SUBS
- 舵机速率:设置接收器 PWM 刷新速率,范围在 50 赫兹和 400 赫兹之间
- LQI输出:输出LQI到一个可选的通道
- 频率微调:频率的微调,区间是-300到300。在不同的A7105模块间调整。LQI回传的数据可以作为调整的参考依据。
支持回传。
9.11. 协议: *Hubsan4¶
Hubsan4 协议支持 Hubsan-X4 四轴的H107系列,直升飞机的H111,H101,H102,H201和H202,和Estes Proto X(但不是 Proto X SLT)。(普通格式)
协议也用在Hubsan的H301F, H302F, H303F和H304F上 (H301格式)。
协议也用在Hubsan的H501S, H122和H123D上(H501格式)
NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Hubsan4 协议支持多达 13 个通道,普通模式只支持自动对频。固定 ID 可以使 用,但是不能防止在开机时自动对频。前4 个通道分别表示副翼,升降,油门,和方向。附加通道可以控制四轴的特殊功能:
H301和H501格式只支持手工对频。
- 通道5控制LED灯。
- 通道6在不同的格式下支持不同功能,如翻转,定高,自稳模式。
- 通道 7 控制视频打开/关闭(H102),或者拍一张照片。
- 通道8控制拍照。
- 通道9打开无头模式。
- 通道10打开返回起点
- 通道11打开GPS保持
- Channel 12 Sets Sport 1, Sport 2 or Acro mode (H123D)
- Channel 13 Enables ‘flip’ mode (H122D)
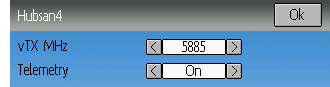
Options configurable on the Hubsan page:
- vTX MHz: Defines the frequency used by the Hubsan H107D video transmitter (Requires a 5.8GHz receiver capable of receiving and displaying video).
- Telemetry: Enable receiving of model battery voltage.
- Freq-fine: Frequency offset adjustment. Range -300 to 300. Adjusts for variances betweeen A7105 modules. Default 0.
9.12. 协议: *Joysway¶
Joysway 协议支持 Joysway Caribbean 帆船模型,和使用的 J4C12R 接收机的Joysway Orion, Explorer, Dragon Force 65 帆船模型和 Force2 60 双体船模型。没有 其他模型或接收器测试过该协议,包括 J4C12R 的空中版本。NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Joysway 协议支持最多四个通道,不支持自动对频,但每当接收机请求对频 时,它将对频。如果固定 ID 被设置为无,遥控器会用特定的 ID 来代替。需要 在第一次使用模型之前手动对频。
第一信道通常控制拉帆绳和第二通道控制船舵。
9.13. 协议:*Bugs3¶
The Bugs3 protocol is used to control MJX Bugs3 and Bugs8 aircraft. NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
To bind first choose the bugs3 protocol and click Bind. Then apply power to the aircraft. The bind dialog will disappear if bind is successful. The aircraft's radio id is stored in the model Fixed ID field. Do not change this value.
Channels used for controlling functions. Set channel value greater than zero to activate.
- Arming is controlled by Channel 5
- Lights are controlled by Channel 6
- Flip is controlled by Channel 7
- Camera is controlled by Channel 8
- Video is controlled by Channel 9
- Angle/Acro mode is controlled by Channel 10 (>0 is Angle)
Telemetry is supported for RSSI and voltage alarm. It uses the Frsky telemetry display with signal strength reported in the RSSI field and battery voltage in VOLT1. The bugs3 receiver only reports good/bad voltage. This is translated to VOLT1 values of 8.4V for good and 6.0V for low voltage.
9.14. 协议: *Frsky-V8¶
Frsky-V8 协议被用于控制旧的 FrskyTM单向协议接收机。NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Frsky-V8 协议支持 8 个通道,不支持自动对频。如果固定 ID 被设置为无,遥控器会用特定的 ID 来代替。需要在第一 次使用模型之前手动对频。
9.15. 协议: *Frsky¶
Frsky 协议被用于控制使用较新的(启用双向回传)Frsky™双向协议(D8) 接收机。NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Frsky 协议支持最多 8 个通道,不支持自动对频。如果固定 ID 被设置为无,遥控器会用特定的 ID 来代替。需要在 第一次使用模型之前手动对频。
Frsky协议支持使用/禁用双向回传。选择框为 Frsky时按下ENT键,访问此选项。
当双向回传启用时接收机支持发送的值(RSSI,VOLT1,VOLT2)。
Additional Hub telemetry values are supported in common with the FrskyX protocol on transmitters except the 7e and f7. See the Frsky Telemetry section below.
9.16. 协议: *FrskyX¶
FrskyX 协议支持 Frsky D16 无线协议,包括 S.Port 和双向回传。
NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
This protocol supports up to 16 channels. Fixed ID binding is supported to link the transmitter with specific receivers. Supports receiver telemetry (RSSI, VOLT1) on all transmitters. Supports S.Port and hub telemetry sensors as well as GPS telemetry (except on memory-limited 7e and f-series) as described in the next section.
以下协议选项可供选择。
频率微调:频率偏移调节。范围从-127到 127调整,以适应不同的 CC2500模 块。一般偏移需要 0 或-41,但如果有对频或范围的问题,则需要进行全范围测试。 默认为 0。LQI回传值可以被用作调节频率的参考。
AD2GAIN:VOLT2 回传数值(X4R 的 AIN 输入)乘以该值然后除以 100。允许对 外部电阻进行调节。默认 100(增量为 1)。范围为 1 到 2000(增量从 0.01 到20.00)。
失控保护:Frsky 失控保护选项完全支持。如果通道失控保护(在混控通道设 置)开启后设置的值每 9秒发送到接收机。除非将协议选项设置为RX,否则接 收器将在失控保护模式下使用这些值。
格式:设置格式以匹配接收机固件。可以选择 FCC 和 EU。EU 版本与 Frsky LBT固件兼容,但实际上并不执行 LBT 测试。
RSSIChan:设置 LastChan 后,接收的 RSSI 将在最后一个通道上传输。最后一个 通道是基于模型中的通道设置的。信道值是接收到的 RSSI 值乘以 21。
S.Port Out:当启用时,收到 s.port 包将回应教练端口,并且扩展的语音被禁用。
Bind Mode: The bind mode will control which channels will be connected to the receiver PWM outputs and allow to enable or disable the receivers telemetry during bind.
Version: This will switch between FrSkyX V1.x.x and V2.1.x protocol version.
通道的失控保护关闭,默认失控保护协议选项“HOLD”,即命令接收机当 接收机进入失控保护模式时保持最后接收到的通道值。“NoPulse”设置将导致 接收机不向 PPM 输出发送任何信号(X8R 测试表明 SBUS 值变为最小,而不是协议规定的 SBUS 行为)。“RX”设置防止 Deviation 发送失控保护设定,以便接收 机使用已经存储在接收机的失控保护值。
当 S.Port Out 被启用,PPM In 不用,收到的 S.Port 数据包在教练端口发出。 比特率是 57600 与 S.Port 解码器兼容,但必须将信号反相,以连接到一个标准 解码器。它可以直接连接到 3.3V FTDI 适配器的输入端。
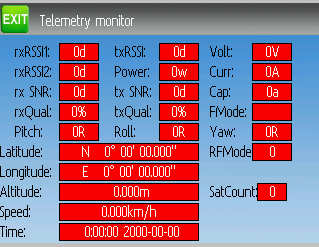
9.17. Frsky 和 FrskyX 扩展双向回传¶
扩展双向回传和 S.Port Frsky 回传传感器。除了Devo 7e外所有的遥控器都支持。他们可以在回传测试和主页面中查看。
FrskyX S.Port 双向回传支持连接多达 16 个相同类型的传感器(例如,电池 电压)。Deviation 支持相同类型的多个传感器,但只有一个回传数值被保存。相 同类型的所有传感器接收到的最新的数值将会显示。
Telemetry values are reset on long press of the Up button while displaying the telemetry monitor page. For Frsky telemetry this resets the vario altitude "ground level" to the next received telemetry value, which zeroes the vario altitude telemetry value. It also resets the battery discharge accumulator and minimum cell voltage. The ground level value is saved in the model file to save the setting through power cycles - the value is fairly constant during a single day of flying in stable air.
双向回传测试页

The CELL voltages are labeled C1-C5.
高度值为报告高于地面的数值。第一个接收到的海拔回传值被设置为地面。
LQI(连接质量)和 LRSSI(本地 RSSI)表示接收回传信号的质量和信号强度。LQI回传值可以被用作调节频率的参考。LQI越低越好,数值小于 50是正常的。LRSSI 单位是(大约)dBm。
派生值:MINCELL 电芯最低电压的值。ALLCELL 是所有电芯电压的总值。DISCHARGE 是总电池放电量,单位为毫安/小时。
9.18. 协议:Skyartec¶
Skyartec 协议被用于控制 Skyartec™接收机和模型
http://www.deviationtx.com/wiki/#hardware_modifications
Skyartec 协议支持多达 7 个通道,不支持自动对频。如果固定 ID 被设置为 无,遥控器会用特定的 ID 来代替。需要在第一次使用模型之前手动对频。
9.19. 协议:Futaba S-FHSS¶
Futaba S-FHSS 协议被用于控制 Futaba™接收机和模型。它还可以用于 XK 的 某些型号,还有有第三方兼容接收器可用。
http://www.deviationtx.com/wiki/#hardware_modifications
S-FHSS协议支持多达 8个通道,并且只支持自动对频。如果固定 ID被设置 为无,遥控器会用特定的 ID 来代替。需要在第一次使用模型之前手动对频。
传统的 Futaba 通道布局为:副翼,升降,油门,方向,Gear,Pitch,Aux1,和 Aux2。所以它适合控制同桨距(CP)直升机。
协议的分辨率是 1024(10bits),所以很小的范围就可以使用(通过第三方设备逆向得到数据)。时间分辨率为 6.8ms。没有双向回传支持。
9.20. 协议:Corona¶
Corona 协议支持 CoronaV1 和 V2 接收机,以及 Flydream V3 接收机。 NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
所有协议都支持多达 8个通道。默认通道顺序是 AETR。协议没有双向回传。
以下协议选项可供选择。
协议:选择协议。Corona 接收机为 V1 和 V2,Flydream V3 为 FDV3。
频率微调:频率偏移调节。范围从-127到 127调整,以适应不同的 CC2500模 块。一般偏移需要 0 或-41,但如果有对频或范围的问题,则需要进行全范围测试。默认为 0。
9.21. Protocol: *Hitec¶
The Hitec protocol supports Optima and Minima receivers. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
The protocol supports up to 9 channels. Default channel order is AETR. Telemetry is supported using the Frsky telemetry layout. The following values are supported: VOLT1, VOLT2, CURRENT, TEMP1, TEMP2, FUEL, RPM, LRSSI, LQI, and GPS (latitude, longitude, altitude, speed, heading). Receiver RSSI is not available in this protocol.
以下协议选项可供选择。
Format: Receiver selection for Optima or Minima.
频率微调:频率偏移调节。范围从-127到 127调整,以适应不同的 CC2500模 块。一般偏移需要 0 或-41,但如果有对频或范围的问题,则需要进行全范围测试。默认为 0。
9.22. 协议:V202¶
V202 协议支持 WLToys V202 四轴飞行器。NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
V202协议支持多达 12个通道,不支持自动对频。如果固定 ID被设置为 无,遥控器会用特定的 ID 来代替。需要在第一次使用模型之前手动对频。
4 个通道分别为副翼,升降,油门,方向。添加通道控制四轴的特殊功能:
- 通道 5 控制闪烁速度
- 通道 6 使“翻滚”模式
- 通道 7拍摄图片
- 通道 8 视频打开/关闭
- 通道 9 无头模式开/关
- 通道 10校准 X轴
- 通道 11校准 Y轴
如果选择 JXD-506 格式,通道 10 到 12 被用于:
- 通道 10 启动/停止
- 通道 11紧急停止
- 通道 12云台控制
另外,在该兼容模式下,开机时需要将油门杆回到中心。
9.23. 协议:SLT¶
SLT 协议被用于控制 TacticSLT / Anylink 接收机。NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
SLT 协议支持多达 6 个通道,并且只支持自动对频。固定 ID 可以使用,但 通电期间不能阻止自动对频。
9.24. 协议: *HiSky¶
HiSky 协议用于 HiSky 品牌模型和 WLToys v922 V955 型号模型。
http://www.deviationtx.com/wiki/#hardware_modifications
HiSky 协议支持多达 7 个通道,不支持自动对频。如果固定 ID 被设置为无, 遥控器会用特定的 ID来代替。需要在第一次使用模型之前手动对频。
9.25. 协议: *YD717¶
YD717 协议支持 YD717 和 Skybotz UFO 迷你四轴飞行器,以及 Sky Walker, XinXun, Ni Hui 的多种模型,和 Syma 协议选项。请参阅支持模型的完整列表。NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
YD717 协议支持 9 个通道,并且只支持自动对频。该协议对频时会一直停留在对频模式,直到成功为止。
前四个通道依次代表副翼,升降,油门,和方向。
通道 5 大于零时为一键翻滚功能。另外,要想左/右翻滚,副翼通道数值应 该为 87 或更大。同样地,升降通道控制前/后翻滚。如果启用一键翻滚,摇 杆移动任何方向就开始朝这个方向翻滚。YD717 要求每次一键翻滚之间至少 间隔四秒钟。
通道6大于零时接通灯
通道7接收到由低到高的变化时拍照。
通道8每次拨动开关,开始/停止视频录制。
通道9被分配给协议可用的最后一个功能。这可能是控制特定模型的无头模式。
9.26. 协议:SymaX¶
该协议用于司马(SymaX)机型:X5C-1,X11,X11C,X12,new X4,和new X6。原始的 X5C 和 X2 的协议被包括在协议选项里。(Syma X3,旧 X4,旧X6 在 YD717 协议的 SymaX4 选项里支持。)支持的模型见完整电子列表。NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the "plus" version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Symax 协议支持 9 个通道,并且只支持自动对频。
前四个通道依次代表副翼,升降,油门,和方向。
通道 5未被使用。
通道 6 大于零时为一键翻滚功能。
通道 7 从负移动到正时拍照。
通道8每次拨动开关,开始/停止视频录制。
通道 9 为正时为无头模式。
9.27. 协议:Hontai¶
该协议用于在 Hontai F801 和 F803 模型。
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the "plus" version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
前四个通道依次代表副翼,升降,油门,和方向。附加通道控制特殊功能:
- 通道 5未使用
- 通道 6 为一键翻滚功能
- 通道 7 由正到零时拍照
- 通道 8 变为正时开启/关闭视频
- 通道 9 无头模式开/关
- 通道10进入回家模式
- 通道 11启动校准
9.28. 协议: *Bayang¶
该协议用于在 BayangToys X6,X7,X8,X9,X16,Boldclash B03,JJRC / Eachine E011,H8,H9D v2,H10,Floureon H101 ,JJRC JJ850,JFH H601,和H606(常规格式)。
该协议可以用于 BayangToys X16 并且可以高度保持(X16-AH 格式)。
该协议 可以用于 IRDRONE Ghost X5(IRDRONE 格式)。
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the "plus" version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
前四个通道依次代表副翼,升降,油门,和方向。附加通道控制特殊功能:
- 通道 5 激活 LED 或倒置飞行(Floureon H101)
- 通道 6 为一键翻滚功能
- 通道 7 数值为正时拍摄单张照片
- 通道 8 数值变为正时启动/停止视频录制
- 通道 9 无头模式开/关
- 通道10进入回家模式
- 通道 11 起飞/着陆
- 通道 12 紧急停机
- Channel 13 analog aux channel #1
- Channel 14 analog aux channel #2
NOTE: Channels 13 and 14 are only active when using NFE Silverware firmware (and some other Silverware forks). Two otherwise static bytes in the protocol overridden to add two 'analog' (non-binary) auxiliary channels. The "Analog Aux" Bayang protocol option must be enabled on the TX and the Silverware firmware must have the Analog Aux feature enabled. Mismatches betwen TX and RX settings will prevent binding.
9.29. 协议: *FY326¶
该协议用于 FY326 红色板。
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the "plus" version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
前四个通道依次代表副翼,升降,油门,和方向。附加通道控制特殊功能:
- 通道 5未使用
- 通道 6 为一键翻滚功能
- 通道 7未使用
- 通道 8未使用
- 通道 9 无头模式开/关
- 通道10进入回家模式
- 通道 11启动校准
9.30. 协议: *CFlie¶
CFlie 协议被用在 CrazyFlie 迷你四轴。它尚未与其他任何模型测试。NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the "plus" version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
CFlie 协议支持多达 4 个通道,不支持自动对频。如果固定 ID 被设置为无, 遥控器会用特定的 ID来代替。需要在第一次使用模型之前手动对频。
9.31. 协议:H377¶
H377 协议支持 NiHui H377 6 通道直升机。它尚未与其他任何模型测试。
http://www.deviationtx.com/wiki/#hardware_modifications
H377协议支持多达 7个通道,不支持自动对频。如果固定 ID被设置为无, 遥控器会用特定的 ID来代替。需要在第一次使用模型之前手动对频。
9.32. 协议: *HM830¶
HM830 协议支持 HM830 A4 折叠纸飞机。它尚未与其他任何模型测试。
http://www.deviationtx.com/wiki/#hardware_modifications
HM830 协议支持 5 个通道,并且只支持自动对频。该协议对频时会一直停 留在对频模式,直到成功为止。
9.33. 协议:KN¶
KN 协议被用在 WLToys V930,V931,V966,V977 和 V988(WLToys 模式) 以及 Feilun FX067C,FX070C 和 FX071C(Feilun 模式)直升机。它尚未与其他任 何模型测试。 NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the "plus" version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
KN 协议支持多达 11 个通道,不支持自动对频。如果固定 ID 被设置为无, 遥控器会用特定的 ID来代替。需要在第一次使用模型之前手动对频。
通道 1-4 依次是油门,副翼,升降和方向。通道 5 控制模型的内置双速率。通道 6 控制油门保持。通道 7 控制熄火(只有 WLToys V931,V966 和 V977)。通道 8 间 6G(默认)和 3G 稳定模式之间切换。通道 9-11 是微调通道,用于油门/螺距,升降舵和方向舵。
9.34. 协议: *ESky150¶
ESky150协议支持 2014年起发布的微型 ESKY模型(150,300,150X)。它 尚未与其他任何模型测试。NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Esky150 协议支持多达 7 个通道,并且不支持自动对频。如果固定 ID 被设 置为无,遥控器会用特定的 ID 来代替。需要在第一次使用模型之前手动对频。
通道 1-4 是油门,副翼,升降和方向。通道 5 是飞行模式(1 位开关仅具有两个状态)。通道 6 测试的模型没有任何作用。通道 7是一个 2位开关(4种状态)。
设置你的模型为 4 通道,如果你有一个 4 通道模型,这是很重要的,否则 油门值会错误。
9.35. 协议:Esky¶
需要完成。NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
ESKY协议支持多达 6个通道,不支持自动对频。如果固定 ID被设置为无, 遥控器会用特定的 ID来代替。需要在第一次使用模型之前手动对频。
9.36. 协议: *BlueFly¶
BlueFly 协议用于 BlueFly HP100。它尚未与其他任何模型测试。
http://www.deviationtx.com/wiki/#hardware_modifications
BlueFly协议支持多达 6个通道,不支持自动对频。如果固定 ID被设置为 无,遥控器会用特定的 ID 来代替。需要在第一次使用模型之前手动对频。
9.37. 协议: *CX10¶
CX10 格式支持澄星(Cheerson) CX10 四轴飞行器。
http://www.deviationtx.com/wiki/#hardware_modifications
CX10 协议支持 9 个通道,并且只支持自动对频。该协议对频时会一直停留在对频模式,直到成功为止。
通道 5 是速度。CX-10A 为无头模式。
通道 6 是一键翻滚。
DM007 模式还使用了通道 7照相。通道 8 视频摄像机。通道 9无头模式。
该协议模式选项有 Blue-A,Green,DM007,Q282,JC3015-1,JC3015-2,MK33041 和 Q242 四轴飞行器。
9.38. 协议: *CG023¶
CG023 协议支持 Eachine CG023 和 3D X4 四轴飞行器。其他模型没有进行 测试。
http://www.deviationtx.com/wiki/#hardware_modifications
CG023 协议支持 9 个通道,并且只支持自动对频。
通道 1-4 依次是副翼,升降,油门和方向。
通道 5控制 LED。
通道 6 控制一键翻滚模式。
通道 7控制相机
通道 8 控制摄像机。
通道 9 控制无头模式。
该协议模式选项有 YD829 四轴飞行器。
9.39. 协议: *H8_3D¶
H8_3D 协议支持 Eachine H8 3D,JJRC H20 和 H11D 四轴飞行器。其他模型没 有进行测试。NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
H8_3D 协议支持 11 个通道,并且只支持自动对频。
通道 1-4 依次是副翼,升降,油门和方向。
通道 5控制 LED。
通道 6 控制一键翻滚模式。
通道 7控制相机
通道 8 控制摄像机。
通道 9 控制无头模式。
通道 10 控制一键返航模式。
通道 11 控制H11D 上相机云台,有 3 个位置。
两个摇杆打到左下角,开始 H8 3D 的加速度计校准,或 H20 的无头校准。
两个摇杆打到右下角,开始 H20 和 H11D 的加速度计校准。
9.40. 协议: *MJXq¶
MJXq 协议支持美嘉欣(MJX)四轴飞行器。模式选项还有 Weilihua WLH08,EAchine E010 和 JJRC H26D / H26WH。NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
MJXq协议支持 12个通道,并且只支持自动对频。
通道 1-4 依次是副翼,升降,油门和方向。
通道 5 控制 LED,如果 H26WH 模式时为 arm。
通道 6 控制一键翻滚模式。
通道 7控制相机
通道 8 控制摄像机。
通道 9 控制无头模式。
通道 10 控制一键返航模式。
通道 11 控制一键翻滚(X600&X800 模式)或相机转动
通道 12 控制相机倾斜。
9.41. Protocol: *Bugs3Mini¶
The Bugs3Mini protocol is used to control MJX Bugs3 Mini and Bugs 3H aircraft. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
To bind first choose the Bugs3Mini protocol and click Bind. Then apply power to the aircraft. The bind dialog will disappear if bind is successful.
Channels used for controlling functions. Set channel value greater than zero to activate.
- Arming is controlled by Channel 5
- Lights are controlled by Channel 6
- Flip is controlled by Channel 7
- Camera is controlled by Channel 8
- Video is controlled by Channel 9
- Angle/Acro mode is controlled by Channel 10 (>0 is Angle)
Telemetry is supported for RSSI and voltage alarm. It uses the Frsky telemetry display with signal strength reported in the RSSI field and battery voltage in VOLT1. The Bugs3 Mini receiver only reports good/warning/low voltage. This is translated to VOLT1 values of 8.40V for good, 7.10V for warning and 6.40V for low voltage.
9.42. Protocol: *E012¶
The E012 protocol is used to control the Eachine E012 quadcopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The E012 protocol supports 10 channels and only supports auto-binding.
通道 1-4 依次是副翼,升降,油门和方向。
- 翻转由通道 6控制
- 无头模式由通道 9 控制
- 回家模式由通道 10 控制
9.43. Protocol: *E015¶
The E015 protocol is used to control the Eachine E015 quad/car/boat. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The E015 protocol supports 10 channels and only supports auto-binding.
通道 1-4 依次是副翼,升降,油门和方向。
- Arming is controlled by Channel 5
- Led light is controlled by Channel 6
- Flip is controlled by Channel 7
- 无头模式由通道 9 控制
- 回家模式由通道 10 控制
9.44. Protocol: *NCC1701¶
The NCC1701 protocol is used to control the Air Hog Star Strek NCC-1701 quadcopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The NCC1701 protocol supports 5 channels and only supports auto binding.
通道 1-4 依次是副翼,升降,油门和方向。
- Warp is controlled by Channel 5
9.45. Protocol: *V911S¶
The V911S protocol is used to control the WL Toys V911-S helicopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The V911S protocol supports 5 channels. The receiver must be bound manually one-time using the ‘Bind’ button, after which it should stay bound.
通道 1-4 依次是副翼,升降,油门和方向。
- Calibration is controlled by Channel 5
9.46. Protocol: *GD00X¶
The GD00X protocol is used to control the C17 C-17 Transport and GD006 Diamond DA62 fixed wings. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The GD00X protocol supports 5 channels and only supports auto binding.
The first four channels are Aileron, Elevator, Throttle and Rudder. Only throttle and aileron channels are used by the model.
- 灯由通道 5控制
9.47. Protocol: *LOLI¶
The LOLI protocol is used to control popular DIY nRF24L01 receivers. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The LOLI protocol supports 8 channels. The receiver must be bound manually one-time using the ‘Bind’ button, after which it should stay bound.
Receiver output modes are configurable via protocol options.
通道 1-4 依次是副翼,升降,油门和方向。
Failsafe settings are supported.
支持回传。
9.48. Protocol: *E016H¶
The E016H protocol is used to control the Eachine E016H quadcopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The E016H protocol supports 8 channels and only supports auto binding.
通道 1-4 依次是副翼,升降,油门和方向。
- Flips are controlled by Channel 5
- Headless mode is controlled by Channel 6
- RTH mode (One Key Return) is controlled by Channel 7
- Emergency stop is controlled by Channel 8
9.49. 协议:PPM¶
PPM协议用于在教练口输出 PPM。这将禁用所有的无线传输。PPM是用于 模拟器或者其他连接到教练端口的遥控机。固定 ID 没有任何作用,并且此协议 不需要对频。
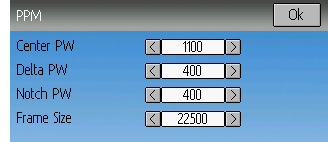
PPM 页面上配置的选项:
- 中点脉宽:定义学生遥控器发射代表舵机中心位置的脉冲时间(微秒)。如果 这个数字和学生遥控器不匹配,舵机不会回中。
- 脉宽变化:定义学生遥控器发射代表舵机最大位置的脉冲宽度(从中心测 量)。如果该值不正确,舵机不会满舵(或摆动太大)。
- 通道间隔:定义通道之间的延迟。
- 总脉宽:定义所有通道要传送的总时间。
- Polarity: Defines the polarity of the signal, Normal is active low.
当教练线插入遥控器时 Deviation 不自动检测。使用 Deviation 连接模拟器 (例如 Phoenix),创建新的模型,写上适当的名字,然后选择 PPM 作为协议。 使用初始化按钮或重新启用遥控器开启 PPM。
9.50. 协议:USBHID¶
USBHID协议将遥控器转换成 USB操纵杆。通过 USB线连接遥控器到 PC, 使被检测到的遥控器变为计算机操纵杆。这使遥控器可以控制任何支持操纵杆输 入的模拟器。需要进行一些初始校准,可以通过操作系统的控制面板小程序来完 成。
9.51. Protocol: SBUS¶
The SBUS protocol sends serial data on the transmitter's trainer port (tip connector). The trainer port ring is ground. On the T8SG PLUS transmitter the serial data also appears on the top pin in the JR module bay. The serial data is not inverted so an adapter may be needed for some SBUS equipment. Up to sixteen channels are supported. Data rate is 100kbps. Format is 8 data bits, even parity, two stop bits.
9.52. Protocol: CRSF (Crossfire)¶
The CRSF protocol sends Crossfire protocol serial data on the transmitter's trainer port (tip connector). The trainer port ring is ground. On the T8SG PLUS transmitter the serial data also appears on the top pin in the JR module bay. To enable telemetry the serial input must be tied to serial output. For the trainer port tie tip to ring1. In the T8SG module bay tie the top and bottom pins together. Up to sixteen channels are supported.
The CRSF bind and configuration operations are not yet supported. Use a PC to bind the Crossfire module and receiver before using with Deviation.
Telemetry is not available on limited memory transmitters (7e, F4, F12).
双向回传测试页
The CELL voltages are labeled C1-C5.
9.53. Protocol: PXX¶
The PXX protocol is an Frsky serial interface to their transmitter modules. Primarily useful for R9M and XJT modules in the JR bay of the T8SG Plus, but protocol is available on the serial port of other transmitters.
Up to 16 channels are supported. Telemetry (S.Port) is supported in the Frsky format for most transmitters. Due to memory constraints telemetry is not available in modular builds. Range check operation is supported. Module power setting is displayed as FCC/EU (e.g. 100/25mW).
Fixed ID is supported to link the transmitter with specific receivers. The Fixed ID corresponds to the receiver number in OpenTX to make sharing easier. Values 0 to 63 are valid. Fixed IDs above 63 are truncated to the valid range.
以下协议选项可供选择。
Failsafe: If the channel failsafe (in mixer channel config) is set this value is sent to the receiver every 9 seconds. The receiver will use these values in failsafe mode unless the protocol option is set to RX. For channels with failsafe set to off, the default Failsafe protocol option "Hold" commands the receiver to hold the last received channel values when the receiver enters failsafe mode. The "NoPulse" setting causes the receiver to not send any signal on PPM outputs (Testing on X8R showed SBUS values went to minimum, but SBUS behavior is not specified by the protocol). The "RX" setting prevents Deviation from sending failsafe settings so the receiver will use whatever failsafe values have been stored in the receiver.
Country: Set the country to match the firmware in the receiver. Options are US, JP, EU.
Rx PWM out: Choose whether PWM outputs of receiver are channels 1-8 or 9-16.
Rx Telem: Turn receiver telemetry on or off.
For transmitters without JR module the PXX signal is available on the serial port output. This is normally the trainer jack except for the Devo12. Use a stereo plug. Tip will be the PXX output, and ring is the s.port input. Sleeve is ground.
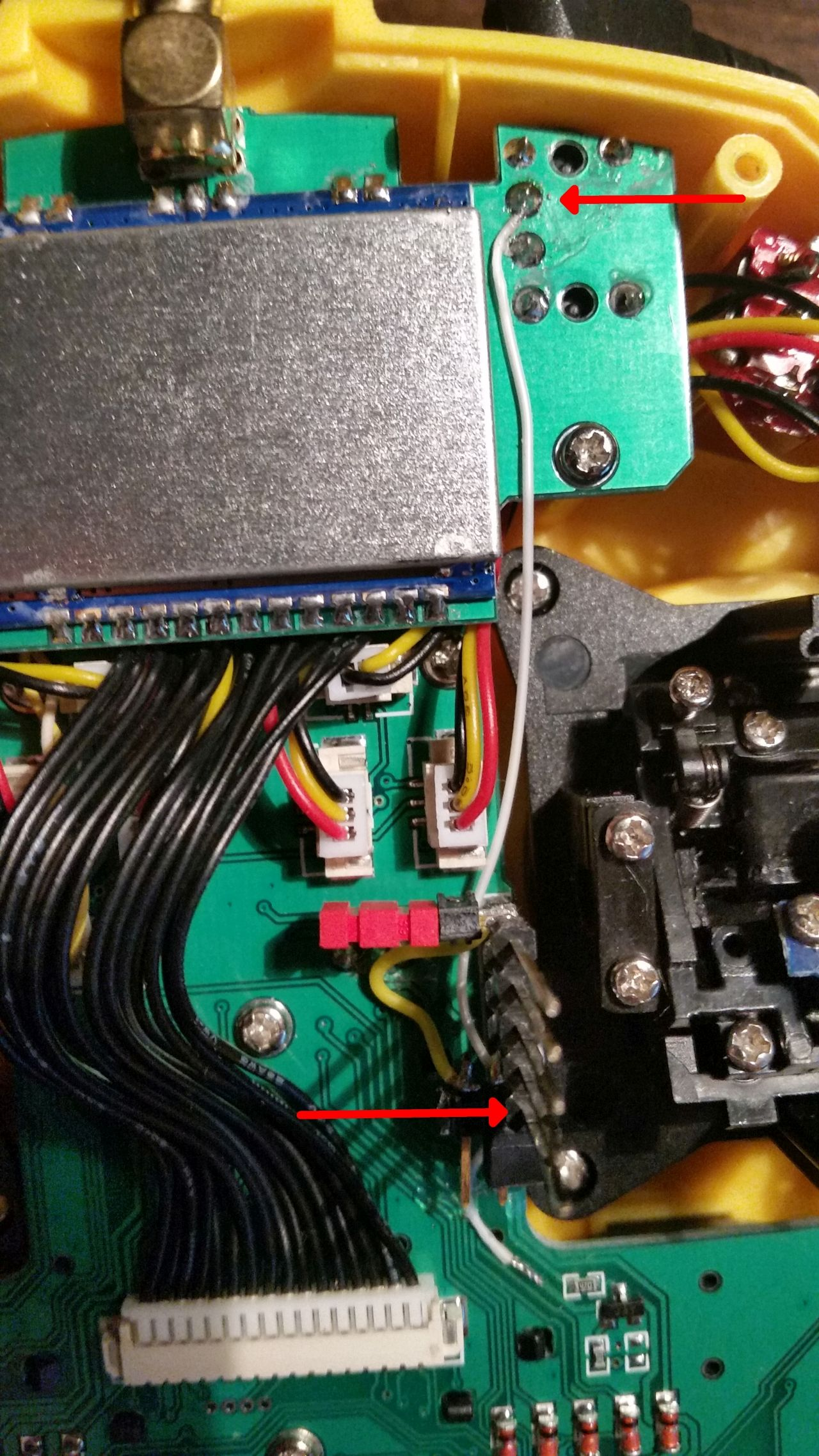
The T8SG V2 Plus requires a hardware modification to receive telemetry from a module in the JR bay. The trainer port ring must be connected to the bottom JR pin (see picture).