
- Posts: 20
Channel Scale.... and Travel Adjust
- Flo38
-
- Offline
Less
More
12 Dec 2012 15:50 #3923
by Flo38
Replied by Flo38 on topic Channel Scale.... and Travel Adjust
Ok, let's try to make it clearer...
1/Subtrim (if you mean a bit like trims but more accurate) :
Not the same problem as differential courses.
You may want to trim the servo such that it is aligned with your wing (taking the example of a wing) instead of doing mechanical settings.
Then you have a symmetrical course, with or without trim. If trimming makes the course assymetrical, I think there is a huge problem because trims are always used and after trimming we want in most of the cases a symetrical course.
2/Scale is a good idea in order to scale... Meaning then we use the full scale setting possibilities for dual rate. But, this is the role of travel adj in a normal radio. That mixes scaling AND the possibility to have an assymetrical course.
3/The problem of overdriving servos.
a/As it has been said by domcars0, pilot has here an important checking role.
b/Moreover, if you create both individual travel adj AND ccpm mixing, you ensure to have:
- A regulated course for each servo
- A regulated course for your cyclic pitch
And then Dual Rate is just needed for CCPM mixing (no interest in having an exponential curve on the "x" servos but on the xy combined CCPM movement, as it is already the case)
I hope it is more understandable...
1/Subtrim (if you mean a bit like trims but more accurate) :
Not the same problem as differential courses.
You may want to trim the servo such that it is aligned with your wing (taking the example of a wing) instead of doing mechanical settings.
Then you have a symmetrical course, with or without trim. If trimming makes the course assymetrical, I think there is a huge problem because trims are always used and after trimming we want in most of the cases a symetrical course.
2/Scale is a good idea in order to scale... Meaning then we use the full scale setting possibilities for dual rate. But, this is the role of travel adj in a normal radio. That mixes scaling AND the possibility to have an assymetrical course.
3/The problem of overdriving servos.
a/As it has been said by domcars0, pilot has here an important checking role.
b/Moreover, if you create both individual travel adj AND ccpm mixing, you ensure to have:
- A regulated course for each servo
- A regulated course for your cyclic pitch
And then Dual Rate is just needed for CCPM mixing (no interest in having an exponential curve on the "x" servos but on the xy combined CCPM movement, as it is already the case)
I hope it is more understandable...
- Muskoka
-
- Offline
Less
More
- Posts: 31
12 Dec 2012 15:52 - 12 Dec 2012 16:05 #3924
by Muskoka
I have no idea what you guys are talking about, but this I don't agree with. The first thing you do when setting up a flybarless system or any head for that matter is zeroing out the servo arms with subtrim, if required. In a perfect world every servo arm would have the capability of being placed at perfect zero, 90 degrees, that's not the case so you use subtrim. Then you set you travel adjust limits or whatever you choose to call them based on that subtrimmed position / value.
This does not move your "zero" positioning of the servo arm you set with subtrim, it just sets travel limits so you don't have any binding in the head.
What am I missing here, subtrim first, then travel adjustments. Without setting the subtrim first (zeroing your servo arms to 90 degrees) you have no starting point to then set your travel adjustments. To set travel adjust first is just backwards. Your setting limits to a non 90 degree servo arm.
They need to be 90'd first with subtrim, then set your travel limits.
If your talking about something totally different then disregard, but subtrim is always the first servo adjustments.
Replied by Muskoka on topic Channel Scale.... and Travel Adjust
FDR wrote: Subtrim have to be added last if you don't want it to be affected by other settings.
Imagine: a servo arm is a bit off center, but you cannot adjust it finer, so you set some subtrim, say 2%.
If the scaling would occur after the subtrim applied, changing the scale (or travel adjust if you please), would move the center point.
I have no idea what you guys are talking about, but this I don't agree with. The first thing you do when setting up a flybarless system or any head for that matter is zeroing out the servo arms with subtrim, if required. In a perfect world every servo arm would have the capability of being placed at perfect zero, 90 degrees, that's not the case so you use subtrim. Then you set you travel adjust limits or whatever you choose to call them based on that subtrimmed position / value.
This does not move your "zero" positioning of the servo arm you set with subtrim, it just sets travel limits so you don't have any binding in the head.
What am I missing here, subtrim first, then travel adjustments. Without setting the subtrim first (zeroing your servo arms to 90 degrees) you have no starting point to then set your travel adjustments. To set travel adjust first is just backwards. Your setting limits to a non 90 degree servo arm.
They need to be 90'd first with subtrim, then set your travel limits.
If your talking about something totally different then disregard, but subtrim is always the first servo adjustments.
Last edit: 12 Dec 2012 16:05 by Muskoka.
- domcars0
-
Topic Author
- Offline
Less
More
- Posts: 390
12 Dec 2012 15:57 - 12 Dec 2012 16:09 #3925
by domcars0
Devo 10 (+7e) owner. It's mine, please don't touch it with your big fingers
Replied by domcars0 on topic Channel Scale.... and Travel Adjust
As we say in France : "a good picture is worth a thousand words ..."..
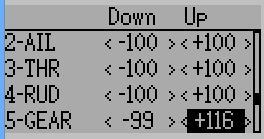
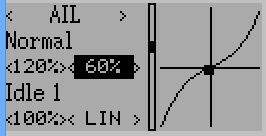
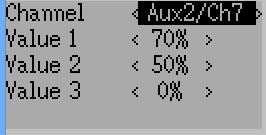
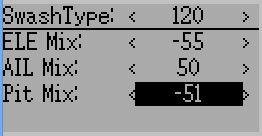
All my mixers curves are set to 1-to-1 100% offset 0 ...
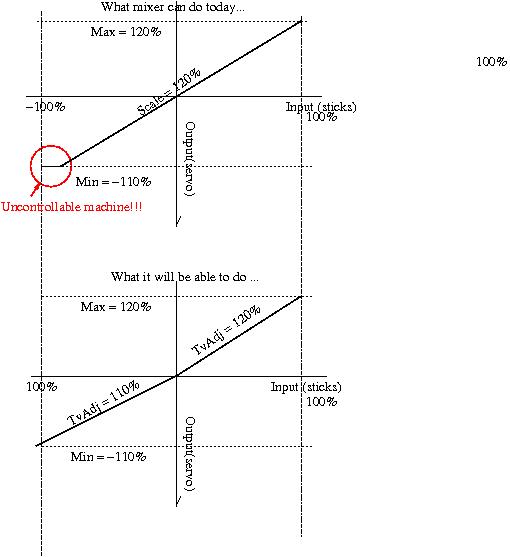
As you can see .. the values of the TrvAdj SET not only the value of what is called Min/Max limits in the actual release but ALSO the scales!
All my mixers curves are set to 1-to-1 100% offset 0 ...
As you can see .. the values of the TrvAdj SET not only the value of what is called Min/Max limits in the actual release but ALSO the scales!
Devo 10 (+7e) owner. It's mine, please don't touch it with your big fingers
Last edit: 12 Dec 2012 16:09 by domcars0.
- FDR
-
- Offline
12 Dec 2012 16:12 - 12 Dec 2012 16:15 #3926
by FDR
Yep, we actually agree on this, just you are talking about the order of configuration, while I wrote about the order of the algorythm in the fw...
Replied by FDR on topic Channel Scale.... and Travel Adjust
Muskoka wrote:
FDR wrote: Subtrim have to be added last if you don't want it to be affected by other settings.
Imagine: a servo arm is a bit off center, but you cannot adjust it finer, so you set some subtrim, say 2%.
If the scaling would occur after the subtrim applied, changing the scale (or travel adjust if you please), would move the center point.
I have no idea what you guys are talking about, but this I don't agree with. The first thing you do when setting up a flybarless system or any head for that matter is zeroing out the servo arms with subtrim, if required. In a perfect world every servo arm would have the capability of being placed at perfect zero, 90 degrees, that's not the case so you use subtrim. Then you set you travel adjust limits or whatever you choose to call them based on that subtrimmed position / value.
This does not move your "zero" positioning of the servo arm you set with subtrim, it just sets travel limits so you don't have any binding in the head.
What am I missing here, subtrim first, then travel adjustments. Without setting the subtrim first (zeroing your servo arms to 90 degrees) you have no starting point to then set your travel adjustments. To set travel adjust first is just backwards. Your setting limits to a non 90 degree servo arm.
They need to be 90'd first with subtrim, then set your travel limits.
If your talking about something totally different then disregard, but subtrim is always the first servo adjustments.
Yep, we actually agree on this, just you are talking about the order of configuration, while I wrote about the order of the algorythm in the fw...
Last edit: 12 Dec 2012 16:15 by FDR.
- domcars0
-
- Offline
Less
More
- Posts: 390
12 Dec 2012 16:13 - 12 Dec 2012 16:14 #3927
by domcars0
But the computer (your TX) make that in the reverse order ... it applies subtrim at the end, that what FDR says.
Devo 10 (+7e) owner. It's mine, please don't touch it with your big fingers
Replied by domcars0 on topic Channel Scale.... and Travel Adjust
You are right Muskoka, pilot setup FIRST subtrim , then TrvAdj etc ...Muskoka wrote: If your talking about something totally different then disregard, but subtrim is always the first servo adjustments.
But the computer (your TX) make that in the reverse order ... it applies subtrim at the end, that what FDR says.
Devo 10 (+7e) owner. It's mine, please don't touch it with your big fingers
Last edit: 12 Dec 2012 16:14 by domcars0.
- rangebound
-
- Offline
Less
More
- Posts: 4
12 Dec 2012 16:21 #3928
by rangebound
Replied by rangebound on topic Channel Scale.... and Travel Adjust
Domcars is right its all about the Asymetry of the output on the sticks
Try this on a Wk2801 or spektrum DX6 or any similar Tx
Set rudder travel adjusts to min= 130 max =90
Look in the monitor and you get :
-130 when the stick is FULL left.
+90 when the stick is FULL right.
If you try to acheive the same with deviation you cant. The closest you can get is :
Scale = 130
Min = -130
Max = 90
But the result as viewed in the monitor is :
-130 when the stick is FULL Left
90 BEFORE the stick hits full right
Min and Max still may have a use in some applications -though they are somewhat redundant due to the Min and Max Mux types in the complex mixer - but if they remain it would be good to have an INHIBIT option on them.
Try this on a Wk2801 or spektrum DX6 or any similar Tx
Set rudder travel adjusts to min= 130 max =90
Look in the monitor and you get :
-130 when the stick is FULL left.
+90 when the stick is FULL right.
If you try to acheive the same with deviation you cant. The closest you can get is :
Scale = 130
Min = -130
Max = 90
But the result as viewed in the monitor is :
-130 when the stick is FULL Left
90 BEFORE the stick hits full right
Min and Max still may have a use in some applications -though they are somewhat redundant due to the Min and Max Mux types in the complex mixer - but if they remain it would be good to have an INHIBIT option on them.
- Muskoka
-
- Offline
Less
More
- Posts: 31
12 Dec 2012 16:23 #3929
by Muskoka
Replied by Muskoka on topic Channel Scale.... and Travel Adjust
Guess I don't understand what your talking about. Still stands though that whether I'm making external adjustments, or the software is "computing" my adjustemnts, the computation of a 90 degree servo arm has to be the very first thing thats caluculated, not travel adjust limits. If the software / fw is making subtrim adjustments after travel adjust limits are set, that's wrong / backwards. Am I still not seeing this correct? I'm not a programmer, so be kind...please.
- domcars0
-
- Offline
Less
More
- Posts: 390
12 Dec 2012 16:33 - 12 Dec 2012 16:35 #3930
by domcars0
") ... subtrims act on servos, trims act on functions (trim is nothing else than a stick small movement)..
... subtrims act on servos, trims act on functions (trim is nothing else than a stick small movement)..
subtrims are NOT manipulate by any mixer/swashmix calculation, trims yes ... But this is not our problem here
Devo 10 (+7e) owner. It's mine, please don't touch it with your big fingers
Replied by domcars0 on topic Channel Scale.... and Travel Adjust
peute peute Flo38Flo38 wrote: 1/Subtrim (if you mean a bit like trims but more accurate)
subtrims are NOT manipulate by any mixer/swashmix calculation, trims yes ... But this is not our problem here
Devo 10 (+7e) owner. It's mine, please don't touch it with your big fingers
Last edit: 12 Dec 2012 16:35 by domcars0.
- FDR
-
- Offline
12 Dec 2012 16:41 #3931
by FDR
The point is that the subtrim is on offset correction: the servo might need a constant offset to be centered at zero input.
It is not calculated, it's constant. It is the only value, which doesn't depend on inputs.
The servo will need that constant offset value whatever way the output is calculated before, that offset shouldn't be changed by any calculation, so it is added last to the output value by the fw.
Replied by FDR on topic Channel Scale.... and Travel Adjust
Muskoka wrote: Guess I don't understand what your talking about. Still stands though that whether I'm making external adjustments, or the software is "computing" my adjustemnts, the computation of a 90 degree servo arm has to be the very first thing thats caluculated, not travel adjust limits. If the software / fw is making subtrim adjustments after travel adjust limits are set, that's wrong / backwards. Am I still not seeing this correct? I'm not a programmer, so be kind...please.
The point is that the subtrim is on offset correction: the servo might need a constant offset to be centered at zero input.
It is not calculated, it's constant. It is the only value, which doesn't depend on inputs.
The servo will need that constant offset value whatever way the output is calculated before, that offset shouldn't be changed by any calculation, so it is added last to the output value by the fw.
- Flo38
-
- Offline
Less
More
- Posts: 20
12 Dec 2012 16:51 - 12 Dec 2012 16:52 #3932
by Flo38
Replied by Flo38 on topic Channel Scale.... and Travel Adjust
I know how to set trims and subtrims. I just means there were not much differences I think... Subtrims could just be more accurate and not changed over the air with buttons...
I was talking about that in order to understand FDR's solution.
But the problem is also well explained in domcars0's picture.
I was talking about that in order to understand FDR's solution.
But the problem is also well explained in domcars0's picture.
Last edit: 12 Dec 2012 16:52 by Flo38.
- vlad_vy
-
- Offline
Less
More
- Posts: 3333
12 Dec 2012 17:11 - 12 Dec 2012 17:19 #3934
by vlad_vy
Replied by vlad_vy on topic Channel Scale.... and Travel Adjust
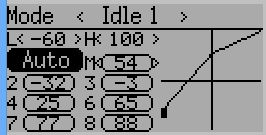
Why not use 3-point curve? Scale = 120%, 1-point = -92%, 2-point = 0%, 3-point = +100%. It's equal -110% - 0% - +120%.
Last edit: 12 Dec 2012 17:19 by vlad_vy.
- Hexperience
-
- Offline
Less
More
- Posts: 588
12 Dec 2012 17:30 - 12 Dec 2012 17:30 #3935
by Hexperience
Ah, now I see what you are getting at. The question is, in the mixer order in the code, does subtrim alter the value, then is value used in the next calculation.
value = 0 (stick at center)
subtrim = 10
value = value + subtrim
value = expo(value) So here we run our expo functions based on +10
value = rate(value)
etc.
OR
value = 0
value = expo(value) Here we run expo based on 0 so the center of the curve is zero
value = rate(value)
{at this point value may not be 0}
value = value + subtrim (Now our subtrim get applied and in effect changes the center of the expo curve.)
Obviously there is no expo(value) function, but I hope you see what I'm getting at.
All I know is it's a lot of fun trying to figure this out!") I love number puzzles...
I love number puzzles...
There are 10 types of people in this world. Those that understand binary and those that don't.
Replied by Hexperience on topic Channel Scale.... and Travel Adjust
FDR wrote: The point is that the subtrim is on offset correction: the servo might need a constant offset to be centered at zero input.
It is not calculated, it's constant. It is the only value, which doesn't depend on inputs.
The servo will need that constant offset value whatever way the output is calculated before, that offset shouldn't be changed by any calculation, so it is added last to the output value by the fw.
Ah, now I see what you are getting at. The question is, in the mixer order in the code, does subtrim alter the value, then is value used in the next calculation.
value = 0 (stick at center)
subtrim = 10
value = value + subtrim
value = expo(value) So here we run our expo functions based on +10
value = rate(value)
etc.
OR
value = 0
value = expo(value) Here we run expo based on 0 so the center of the curve is zero
value = rate(value)
{at this point value may not be 0}
value = value + subtrim (Now our subtrim get applied and in effect changes the center of the expo curve.)
Obviously there is no expo(value) function, but I hope you see what I'm getting at.
All I know is it's a lot of fun trying to figure this out!
There are 10 types of people in this world. Those that understand binary and those that don't.
Last edit: 12 Dec 2012 17:30 by Hexperience.
- Hexperience
-
- Offline
Less
More
- Posts: 588
12 Dec 2012 17:35 #3936
by Hexperience
Bingo!
LOL... you know for every problem there is a solution, and every solution there is a problem.
That's why I love custom firmware... there's always a way to make it do what you want.
There are 10 types of people in this world. Those that understand binary and those that don't.
Replied by Hexperience on topic Channel Scale.... and Travel Adjust
vlad_vy wrote: Why not use 3-point curve? Scale = 120%, 1-point = -92%, 2-point = 0%, 3-point = +100%. It's equal -110% - 0% - +120%.
Bingo!
LOL... you know for every problem there is a solution, and every solution there is a problem.
That's why I love custom firmware... there's always a way to make it do what you want.
There are 10 types of people in this world. Those that understand binary and those that don't.
- suvsuv
-
- Offline
Less
More
- Posts: 268
12 Dec 2012 17:36 - 12 Dec 2012 17:40 #3937
by suvsuv
bitbucket.org/sunvsuv/devil10
Replied by suvsuv on topic Channel Scale.... and Travel Adjust
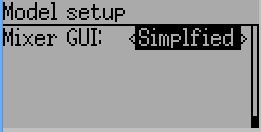
I already implement a Walkera/JR like Mixer GUI for devo10. To support asymmetry travel adjust, the current servoscale must be broken into 2 parameters: servoscale and servoscaleneg. You can check out detail implementation from the following repo for the new Mixer GUI.Flo38 wrote: I know how to set trims and subtrims. I just means there were not much differences I think... Subtrims could just be more accurate and not changed over the air with buttons...
I was talking about that in order to understand FDR's solution.
But the problem is also well explained in domcars0's picture.
bitbucket.org/sunvsuv/devil10
Last edit: 12 Dec 2012 17:40 by suvsuv.
- domcars0
-
- Offline
Less
More
- Posts: 390
12 Dec 2012 17:57 #3938
by domcars0
Imagine now that I want EXP/DR curves (not 1-to-1) or complexe.. with the same scales and Min/Max... how can I do that easily? Yes it's possible with 13Pts curves but my brain is not a Cray
Devo 10 (+7e) owner. It's mine, please don't touch it with your big fingers
Replied by domcars0 on topic Channel Scale.... and Travel Adjust
vlad_vy : I know that it's possible to implement the curve from my picture with the actual mixer, the issue is not here ....vlad_vy wrote: Why not use 3-point curve? Scale = 120%, 1-point = -92%, 2-point = 0%, 3-point = +100%. It's equal -110% - 0% - +120%.
Imagine now that I want EXP/DR curves (not 1-to-1) or complexe.. with the same scales and Min/Max... how can I do that easily? Yes it's possible with 13Pts curves but my brain is not a Cray
Devo 10 (+7e) owner. It's mine, please don't touch it with your big fingers
- domcars0
-
- Offline
Less
More
- Posts: 390
12 Dec 2012 17:59 #3939
by domcars0
Devo 10 (+7e) owner. It's mine, please don't touch it with your big fingers
Replied by domcars0 on topic Channel Scale.... and Travel Adjust
Humm... very interesting ... I will have a look.. thanks Suvsuvsuvsuv wrote: I already implement a Walkera/JR like Mixer GUI for devo10. To support asymmetry travel adjust, the current servoscale must be broken into 2 parameters: servoscale and servoscaleneg. You can check out detail implementation from the following repo for the new Mixer GUI.
bitbucket.org/sunvsuv/devil10
Devo 10 (+7e) owner. It's mine, please don't touch it with your big fingers
- Hexperience
-
- Offline
Less
More
- Posts: 588
12 Dec 2012 18:19 - 12 Dec 2012 18:26 #3940
by Hexperience
There are 10 types of people in this world. Those that understand binary and those that don't.
Replied by Hexperience on topic Channel Scale.... and Travel Adjust
Ok... so here's a couple of things from er9x...

In the er9x mixer Weight is what we call scale in deViation. Also notice the options for trim and flightmode trim.. (Wish I knew er9x better to understand exactly what they mean here).
What they also have is Rates for both positive and negative.

In what order all this is calculated is the second part of the issue at hand. And of course I have no idea...
*** Standard disclaimer: I, in no way, am saying deViation should be the same as er9x, nor am I saying deViation is in any way inferior to any other custom firmware. I would like to thank PB and everyone involved with deViation for their hard work and commitment. ***
In the er9x mixer Weight is what we call scale in deViation. Also notice the options for trim and flightmode trim.. (Wish I knew er9x better to understand exactly what they mean here).
What they also have is Rates for both positive and negative.
In what order all this is calculated is the second part of the issue at hand. And of course I have no idea...
*** Standard disclaimer: I, in no way, am saying deViation should be the same as er9x, nor am I saying deViation is in any way inferior to any other custom firmware. I would like to thank PB and everyone involved with deViation for their hard work and commitment. ***
There are 10 types of people in this world. Those that understand binary and those that don't.
Last edit: 12 Dec 2012 18:26 by Hexperience.
- vlad_vy
-
- Offline
Less
More
- Posts: 3333
12 Dec 2012 18:26 #3941
by vlad_vy
It's possible, but 3-point curve will be different (always positive). Scale=120%, Complex mix (4 pages) -> EXPO curve 1 (Mux:replace) -> EXPO curve 2 (Mux:replace) -> EXPO curve 3 (Mux:replace) -> 3-point curve (+92% - 0 - +100%)(Mux:mult).
Replied by vlad_vy on topic Channel Scale.... and Travel Adjust
domcars0 wrote:
vlad_vy : I know that it's possible to implement the curve from my picture with the actual mixer, the issue is not here ....vlad_vy wrote: Why not use 3-point curve? Scale = 120%, 1-point = -92%, 2-point = 0%, 3-point = +100%. It's equal -110% - 0% - +120%.
Imagine now that I want EXP/DR curves (not 1-to-1) or complexe.. with the same scales and Min/Max... how can I do that easily? Yes it's possible with 13Pts curves but my brain is not a Cray
It's possible, but 3-point curve will be different (always positive). Scale=120%, Complex mix (4 pages) -> EXPO curve 1 (Mux:replace) -> EXPO curve 2 (Mux:replace) -> EXPO curve 3 (Mux:replace) -> 3-point curve (+92% - 0 - +100%)(Mux:mult).
- domcars0
-
- Offline
Less
More
- Posts: 390
12 Dec 2012 18:32 #3942
by domcars0
Devo 10 (+7e) owner. It's mine, please don't touch it with your big fingers
Replied by domcars0 on topic Channel Scale.... and Travel Adjust
Hum... After compiled your code (#363073f commit) ... I'am unable to load any template, emu crash with "buffer overflow detected" error ...
It crash also when I want to change the Mixer Gui <Advanced> ... a dialog box open 'Not a traditional model, reset it' , emu crash if I click 'OK' (same error "buffer overflow detected").
I compile on linux
It crash also when I want to change the Mixer Gui <Advanced> ... a dialog box open 'Not a traditional model, reset it' , emu crash if I click 'OK' (same error "buffer overflow detected").
I compile on linux
Devo 10 (+7e) owner. It's mine, please don't touch it with your big fingers
- Hexperience
-
- Offline
Less
More
- Posts: 588
12 Dec 2012 18:35 - 12 Dec 2012 18:48 #3943
by Hexperience
If you have a LIMIT it SHOULD stop BEFORE the stick hits full right, to have it go all the way you would set it as a RATE.
Or maybe I've got it all wrong... my head hurts. I need a break. (Back to work)
There are 10 types of people in this world. Those that understand binary and those that don't.
Replied by Hexperience on topic Channel Scale.... and Travel Adjust
rangebound wrote: Domcars is right its all about the Asymetry of the output on the sticks
Try this on a Wk2801 or spektrum DX6 or any similar Tx
Set rudder travel adjusts to min= 130 max =90
Look in the monitor and you get :
-130 when the stick is FULL left.
+90 when the stick is FULL right.
If you try to acheive the same with deviation you cant. The closest you can get is :
Scale = 130
Min = -130
Max = 90
But the result as viewed in the monitor is :
-130 when the stick is FULL Left
90 BEFORE the stick hits full right
Min and Max still may have a use in some applications -though they are somewhat redundant due to the Min and Max Mux types in the complex mixer - but if they remain it would be good to have an INHIBIT option on them.
If you have a LIMIT it SHOULD stop BEFORE the stick hits full right, to have it go all the way you would set it as a RATE.
Or maybe I've got it all wrong... my head hurts. I need a break. (Back to work)
There are 10 types of people in this world. Those that understand binary and those that don't.
Last edit: 12 Dec 2012 18:48 by Hexperience.
Time to create page: 0.906 seconds
-
Home

-
Forum
-
News, Announcements and Feedback
-
Feedback & Questions
- Channel Scale.... and Travel Adjust