
PID tuning/setting on the actual transmitter
- stevecox
-
Topic Author
- Offline
- Keep swinging
Less
More
03 Jan 2014 21:22 #17891
by stevecox
Adelaide
PID tuning/setting on the actual transmitter was created by stevecox
It's just something I have been trying to get my head around if there would be any benefits. In some situations I think it could be, for both speeding up responses to stick movement and in others dulling out depending on the aircraft in use and pilot proficiency. Would it be something that is even possible to implement on a tx? To be quite honest if it were possible I think I would prefer this to expo hands down. Probably take a significant amount of time and patience to set up and beginners could end up trashing many planes if set up wrong and could get lost in settings. I am thinking more for aircraft usage not multirotor or heli, and yeah I know you could always stick a flight controller in the aircraft, but still just interested to know if it were possible.
Adelaide
- rbe2012
-
- Offline
- So much to do, so little time...
Less
More
- Posts: 1433
04 Jan 2014 08:01 #17910
by rbe2012
Replied by rbe2012 on topic PID tuning/setting on the actual transmitter
Steve,
I know the term "PID" only in some scopes which do not seem to fit here. Can you explain what it means for you?
I know the term "PID" only in some scopes which do not seem to fit here. Can you explain what it means for you?
- RandMental
-
- Offline
Less
More
- Posts: 521
04 Jan 2014 10:28 - 04 Jan 2014 10:30 #17913
by RandMental
Replied by RandMental on topic PID tuning/setting on the actual transmitter
PID is a control system abbreviation and describes a 3 element (law) control configuration or algorithm:
P - proportion control law
I - Integral Control law
D - Differential control law
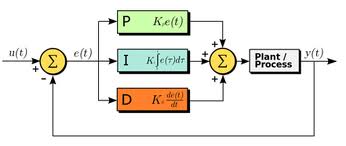
When flying an RC model there are a large number of closed-loop control loops that in fact may already be use PID control algorithms, eg. inside every servo on the model, inside the gyro and FBL controllers. On the highest (outer) level the pilot is also part of the closed control loop and the pilot is in fact is the learning control element closing the loop to keep the model in the air.
Deviation and other programmable TX's all provide a programmable P term (loop gain or scale/range). The I and D elements however require high speed, fixed period or continuous analogue feedback to work properly (the y(t) above in the diagram) otherwise it dynamically affects the D and I gain terms. The low cost telemetry we have cannot provide this level of feedback nor provide the reliability required for safety purposes.
This is where Drones and UAV comes in, their sensors, control algorithms and control/feedback loops are all local on the model and you have a remote command feed to initiate the required actions - the mission critical control functions are not distributed across the TX and Model.
P - proportion control law
I - Integral Control law
D - Differential control law
When flying an RC model there are a large number of closed-loop control loops that in fact may already be use PID control algorithms, eg. inside every servo on the model, inside the gyro and FBL controllers. On the highest (outer) level the pilot is also part of the closed control loop and the pilot is in fact is the learning control element closing the loop to keep the model in the air.
Deviation and other programmable TX's all provide a programmable P term (loop gain or scale/range). The I and D elements however require high speed, fixed period or continuous analogue feedback to work properly (the y(t) above in the diagram) otherwise it dynamically affects the D and I gain terms. The low cost telemetry we have cannot provide this level of feedback nor provide the reliability required for safety purposes.
This is where Drones and UAV comes in, their sensors, control algorithms and control/feedback loops are all local on the model and you have a remote command feed to initiate the required actions - the mission critical control functions are not distributed across the TX and Model.
Last edit: 04 Jan 2014 10:30 by RandMental.
- stevecox
-
- Offline
- Keep swinging
04 Jan 2014 11:05 #17915
by stevecox
Adelaide
Replied by stevecox on topic PID tuning/setting on the actual transmitter
PID is not the right words sorry! What I am aiming for is a 'dynamic expo' of say 30%, then that 30% would follow the position of the stick, not be fixed at 0% point. If I am holding the stick at 50% movement, at that point I still have 30% 'dynamic expo' in effect before and after that physical stick position. Currently the expo is calculated at the fixed point of 0, for an expo setting of 30%, stick movements between 50-80% have no expo effect applied. My method you would have the 'dynamic expo' available over the entire range of movement of the sticks. The tx would constantly have to recalculate the 'dynamic expo' surrounding the stick depending on the position of the stick. A fixed value that 'follows' the sticks. In the picture I think you can see what I mean.

Adelaide
- rbe2012
-
- Offline
- So much to do, so little time...
Less
More
- Posts: 1433
04 Jan 2014 15:11 #17925
by rbe2012
Replied by rbe2012 on topic PID tuning/setting on the actual transmitter
Just to be sure: you want the expo zero point moving along with your stick, e.g. if you have your stick at 80% you want a small change when the stick moves not around the stick's zero but around 80%.
Ok. But how should be determined when the new zero point has to be set new? If the stick was not moved for a constant time? Or when the direction changes?
I think it might be possible to realize such a function (we would have to extrapolate the expo function to +/-200% and apply it shifted), but I am not imaginative enough to see how to get it working in a meaningful way.
Ok. But how should be determined when the new zero point has to be set new? If the stick was not moved for a constant time? Or when the direction changes?
I think it might be possible to realize such a function (we would have to extrapolate the expo function to +/-200% and apply it shifted), but I am not imaginative enough to see how to get it working in a meaningful way.
- RandMental
-
- Offline
Less
More
- Posts: 521
04 Jan 2014 18:54 - 04 Jan 2014 18:55 #17947
by RandMental
Replied by RandMental on topic PID tuning/setting on the actual transmitter
Hi Steve,
I am trying to visualize what effect this would have on the control of the model. Adding to the issues that RBE mentioned of how to implement it, that same issues will affect the aircraft's control.
Lets explain:
If you apply the dynamic expo immediately then you will have the 30% dynamic expo applied the whole time - which means it just reduce the scale/range by 30%.
If you apply it after a period, say one second at the same 80% stick position, suddenly the movement required to stop or maintain the roll will change. I think this will confuse the pilot as the gain will change dynamically and perhaps in a non predictive way.
I am trying to visualize what effect this would have on the control of the model. Adding to the issues that RBE mentioned of how to implement it, that same issues will affect the aircraft's control.
Lets explain:
If you apply the dynamic expo immediately then you will have the 30% dynamic expo applied the whole time - which means it just reduce the scale/range by 30%.
If you apply it after a period, say one second at the same 80% stick position, suddenly the movement required to stop or maintain the roll will change. I think this will confuse the pilot as the gain will change dynamically and perhaps in a non predictive way.
Last edit: 04 Jan 2014 18:55 by RandMental.
- stevecox
-
- Offline
- Keep swinging
04 Jan 2014 21:06 #17949
by stevecox
Adelaide
Replied by stevecox on topic PID tuning/setting on the actual transmitter
Yeah thats where I was getting confused with the PID mention, including things like if the stick was at 80% the rate at which it got there vs reaction time of the output to 80% and then from that 80% point say a movement back to 20% and the resulting rate of change and stick distance movement to that position and the output change to there. With current expo you can 'numb' the sticks around zero only. Say a scenario for a manouvre, maybe in the wind a knife edge, where you are holding more rudder and elevator than your set expo in the current method, ie you are out of the expo zone, you loose the advantage of having expo at that point to control your manouvre which I am trying to get my head around, I think may be nice having expo available. Kind of a 'numbing' round the sticks at any position. Getting technical this could incorporate the rate at which the stick is moving to the distance traveled over time and have a 'numbing' based on that. Although I can see benefits in some scenario's it may prove worse in others, was mainly aiming to see if anyone else had been thinking about this. What may be nice is an extra setting that would allow how 'hard' the current expo setup could be applied to a stick movement depending on the rate/distance at which the sick moves, calculated from the 0. But anyway, at the end of the day, its good like it is and perhaps don't fix anything that aint broke!
Adelaide
- PhracturedBlue
-
- Offline
Less
More
- Posts: 4403
05 Jan 2014 01:53 #17959
by PhracturedBlue
Replied by PhracturedBlue on topic PID tuning/setting on the actual transmitter
I don't think you'd want a threshold for something like this.
Instead, what we'd need to do is to use the rate of change to compute the curve. The problem is that we are sampling at a very high rate, so detecting rate of change isn't so easy. That is to say, we've already applied the change as it occurs because we sample every 5msec. We don't ever get a chance to say something like 'If the stick moved less than 5% in the past 100msec, apply expo' because when you turn that into 5msec, you get 'If the stick moved less than 0.25% in the past 5msec, apply expo' Since that is in the noise or the sensor, we'd never get the behavior we want.
Of course the ideal implementation would be a smooth curve so there is no knife-edge to the controls. Something like this:
0-3% over 100msec = derate movement by 50%
3-5% over 100msec = derate movement by 30%
5-7% over 100msec = deeate movement by 15%
etc
(though even better would be to apply the actual expo function based on stick speed)
Anyhow, I'm not sure how to actually do it with our current implementation.
Instead, what we'd need to do is to use the rate of change to compute the curve. The problem is that we are sampling at a very high rate, so detecting rate of change isn't so easy. That is to say, we've already applied the change as it occurs because we sample every 5msec. We don't ever get a chance to say something like 'If the stick moved less than 5% in the past 100msec, apply expo' because when you turn that into 5msec, you get 'If the stick moved less than 0.25% in the past 5msec, apply expo' Since that is in the noise or the sensor, we'd never get the behavior we want.
Of course the ideal implementation would be a smooth curve so there is no knife-edge to the controls. Something like this:
0-3% over 100msec = derate movement by 50%
3-5% over 100msec = derate movement by 30%
5-7% over 100msec = deeate movement by 15%
etc
(though even better would be to apply the actual expo function based on stick speed)
Anyhow, I'm not sure how to actually do it with our current implementation.
- rbe2012
-
- Offline
- So much to do, so little time...
Less
More
- Posts: 1433
05 Jan 2014 09:09 #17974
by rbe2012
Replied by rbe2012 on topic PID tuning/setting on the actual transmitter
Would it help to have a switch-triggered setting (means: the expo zero is set new when you flip the switch, applied to the actual stick position)? So you could use it if you want to and reset it too. No issue with "long-time" measurement...
- RandMental
-
- Offline
Less
More
- Posts: 521
05 Jan 2014 09:55 - 05 Jan 2014 13:32 #17975
by RandMental
Thinking about it we already have the PI components in the RC control loop and it might just benefit to an open-loop feed-forward D term, eg. the gain increase the higher the rate of stick movement.
Replied by RandMental on topic PID tuning/setting on the actual transmitter
PhracturedBlue wrote: ... Instead, what we'd need to do is to use the rate of change to compute the curve. The problem is that we are sampling at a very high rate, so detecting rate of change isn't so easy.....
Thinking about it we already have the PI components in the RC control loop and it might just benefit to an open-loop feed-forward D term, eg. the gain increase the higher the rate of stick movement.
- The P-term provided by the TX Scale/Range and Expo settings
- The I-term provided by the Pilot - based on the movement history/trend of the model, corrections are applied and on a plane the trim buttons are used to remove the constant offset corrections
- The D-term based on the stick rate of change.
The D term would thus reduce the gain (scale) at slow stick movements, i.e. you would have the normal 100% scale and anything slower (than a threshold to set by each pilot) the gain is proportionally reduced
Last edit: 05 Jan 2014 13:32 by RandMental.
- vlad_vy
-
- Offline
Less
More
- Posts: 3333
05 Jan 2014 10:02 #17977
by vlad_vy
Replied by vlad_vy on topic PID tuning/setting on the actual transmitter
I wonder how you can get used to the transmitter, which dynamically changes the response. I think it's impossible.
- RandMental
-
- Offline
Less
More
- Posts: 521
05 Jan 2014 10:14 - 05 Jan 2014 10:16 #17978
by RandMental
Hi Vlad
That is true, also my first thought. But if it's based on the stick rate of change (and not position as Steve originally suggested) it would be a defined and predictable gain change that the Pilot would become use to.
It is not that unusual to have D-terms in HID devices control loops to assist the pilots of full scale aircraft.
Replied by RandMental on topic PID tuning/setting on the actual transmitter
vlad_vy wrote: I wonder how you can get used to the transmitter, which dynamically changes the response. I think it's impossible.
Hi Vlad
That is true, also my first thought. But if it's based on the stick rate of change (and not position as Steve originally suggested) it would be a defined and predictable gain change that the Pilot would become use to.
It is not that unusual to have D-terms in HID devices control loops to assist the pilots of full scale aircraft.
Last edit: 05 Jan 2014 10:16 by RandMental.
- stevecox
-
- Offline
- Keep swinging
05 Jan 2014 11:11 #17980
by stevecox
Adelaide
Replied by stevecox on topic PID tuning/setting on the actual transmitter
It would be a nice feature to experiment with but as a necessary feature I am not sure, it would have to be trial and error to see the real life effects.
Aside from this unrelated but related ... I think the current implementation can perhaps already do this with some careful tx setup? Can you have the 'position' of the throttle stick say between the stick movement of 40%->100% used as a reference to the amount of expo being applied to a different channel. In this scenario of 30% expo, having throttle of 0%-40% having an effect of 0% expo on the channel, then as the throttle is increased from 40% through to 100% have the expo weight increase from 0% expo through to 30% expo at 100% throttle stick movement on a different assigned channel?
Aside from this unrelated but related ... I think the current implementation can perhaps already do this with some careful tx setup? Can you have the 'position' of the throttle stick say between the stick movement of 40%->100% used as a reference to the amount of expo being applied to a different channel. In this scenario of 30% expo, having throttle of 0%-40% having an effect of 0% expo on the channel, then as the throttle is increased from 40% through to 100% have the expo weight increase from 0% expo through to 30% expo at 100% throttle stick movement on a different assigned channel?
Adelaide
- RandMental
-
- Offline
Less
More
- Posts: 521
05 Jan 2014 14:47 #17987
by RandMental
Replied by RandMental on topic PID tuning/setting on the actual transmitter
I have no tried it yet, but I am sure one can implement it with a few virtual channels to generate the conditions to be used as input to set the channel values via the complex mixer pages.
Time to create page: 0.585 seconds
-
Home

-
Forum
-
General
-
General Discussions
- PID tuning/setting on the actual transmitter