
- Posts: 9
Devo 10: strange link between Thrust and Rudder
- symfen
-
Topic Author
- Offline
Less
More
04 May 2017 16:03 #61995
by symfen
Devo 10: strange link between Thrust and Rudder was created by symfen
I have equipped a brand new devo 10 with the 4in1-Modul, both from banggood.
Then, I have put the nightly build "deviation-devo10-v5.0.0-403c3b6.zip" into the devo 10. All went perfectly, as stated in the manual.
But I notice a strange relation between the two input channels of the right stick (I use Mode 3):
Thrust works nice -100% to +100% (Stick down-up)
But Rudder is not responding on Left-Right-Moves of the Stick, but the input channel reflects the setting of Thrust, but negated!
So, when thrust is 100%, rudder is -100%, when thrust is 0, rudder is also 0 etc.
I notice, that the change in the rudder is delayed by a second or so, and it slowly goes to the new value!
So, the TX is not usable, because no independent Rudder.
Is this a basic error in this devo 10?
I just want to make a simple test with syma X5C.
Any suggestions would be very welcome
Then, I have put the nightly build "deviation-devo10-v5.0.0-403c3b6.zip" into the devo 10. All went perfectly, as stated in the manual.
But I notice a strange relation between the two input channels of the right stick (I use Mode 3):
Thrust works nice -100% to +100% (Stick down-up)
But Rudder is not responding on Left-Right-Moves of the Stick, but the input channel reflects the setting of Thrust, but negated!
So, when thrust is 100%, rudder is -100%, when thrust is 0, rudder is also 0 etc.
I notice, that the change in the rudder is delayed by a second or so, and it slowly goes to the new value!
So, the TX is not usable, because no independent Rudder.
Is this a basic error in this devo 10?
I just want to make a simple test with syma X5C.
Any suggestions would be very welcome
- vlad_vy
-
- Offline
Less
More
- Posts: 3333
04 May 2017 16:17 #61996
by vlad_vy
Replied by vlad_vy on topic Devo 10: strange link between Thrust and Rudder
It looks like rudder input disconnected, try to reconnect rudder stick pot connectors.
- symfen
-
- Offline
Less
More
- Posts: 9
04 May 2017 16:51 #61999
by symfen
Replied by symfen on topic Devo 10: strange link between Thrust and Rudder
I have tested the pot of rudder and aileron: both vary approx. from 500Ohm to 5kOhm. And both are in the connectors at both sides of the main board.
- symfen
-
- Offline
Less
More
- Posts: 9
04 May 2017 17:40 #62001
by symfen
Replied by symfen on topic Devo 10: strange link between Thrust and Rudder
Some further observations: the connection between the right controls is independent of the mode. The connection seems to come from a software because the left-right-Signal is slowly following the up-down-signal (which reacts immediately on the stick motion).
Without any connection diagrams it is difficult, to understand, where the connection is coming from.
Without any connection diagrams it is difficult, to understand, where the connection is coming from.
- mwm
-
- Offline
05 May 2017 02:40 #62013
by mwm
Do not ask me questions via PM. Ask in the forums, where I'll answer if I can.
My remotely piloted vehicle ("drone") is a yacht.
Replied by mwm on topic Devo 10: strange link between Thrust and Rudder
First step quit running the nightly build. It's got a new GUI and is changing relatively rapidly. Test it with firmware that we can have some confidence isn't buggy. Either the 5.0.0 release, 5.0 plus updated protocols, or the original Devention firmware.
If those fail, then it's probably a hardware problem. If you haven't done any hardware mods on it, I'd be tempted to put Devention back on it (which is why I'd test with it) and return it to whoever you bought it from.
If those fail, then it's probably a hardware problem. If you haven't done any hardware mods on it, I'd be tempted to put Devention back on it (which is why I'd test with it) and return it to whoever you bought it from.
Do not ask me questions via PM. Ask in the forums, where I'll answer if I can.
My remotely piloted vehicle ("drone") is a yacht.
- FDR
-
- Offline
05 May 2017 06:08 #62018
by FDR
Replied by FDR on topic Devo 10: strange link between Thrust and Rudder
It might be simply a broken wire or a cold solder joint, but sounds definitely a hardware issue.
Agree on putting back the stock devention firmware and try in than...
Agree on putting back the stock devention firmware and try in than...
- symfen
-
- Offline
Less
More
- Posts: 9
05 May 2017 07:09 #62021
by symfen
Replied by symfen on topic Devo 10: strange link between Thrust and Rudder
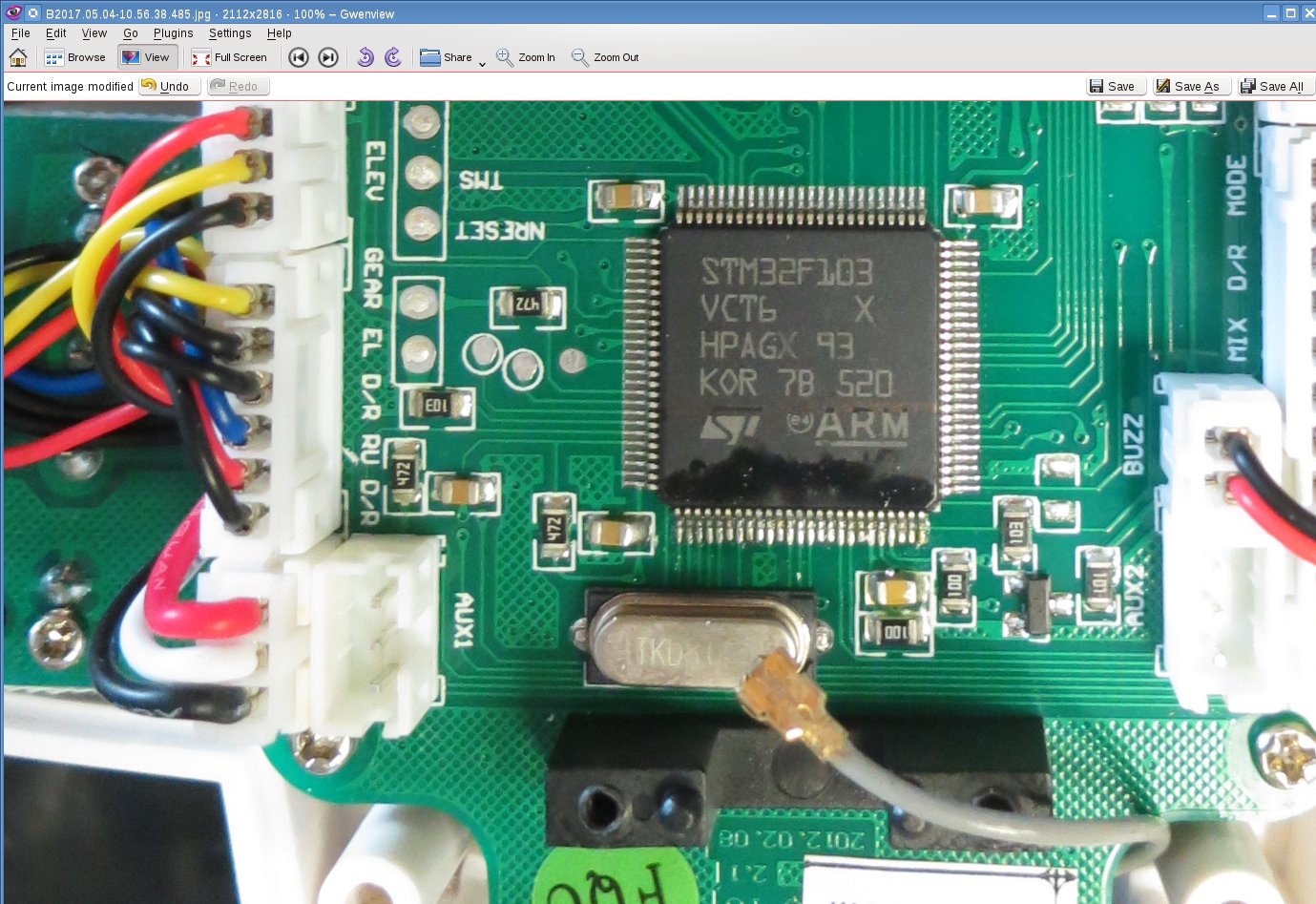
Thank you for your suggestions. I think, I have found something: before I started to build the 4in1-module into the devo 10, I made some photos: When looking into the attached photo, it seems to me, as someone would have done some corrections on the STM-processor: It seems, that the Pin 7 from the right bottom corner has a solder joint to pin 6. I will try to remove this joint and try again.
The picture shows the board with the original devo HF module removed (antenna connector is visible).
BTW: Also with the firmware 5.0, the coupling is the same. So, it seems definitely, that it is a hardware error.
The picture shows the board with the original devo HF module removed (antenna connector is visible).
BTW: Also with the firmware 5.0, the coupling is the same. So, it seems definitely, that it is a hardware error.
- vlad_vy
-
- Offline
Less
More
- Posts: 3333
05 May 2017 09:38 - 05 May 2017 09:40 #62025
by vlad_vy
Replied by vlad_vy on topic Devo 10: strange link between Thrust and Rudder
Next two pins are right stick inputs (C2=pin17=horisontal and C3=pin18=vertical).
Last edit: 05 May 2017 09:40 by vlad_vy.
- symfen
-
- Offline
Less
More
- Posts: 9
05 May 2017 10:36 #62026
by symfen
Replied by symfen on topic Devo 10: strange link between Thrust and Rudder
Do you have a schematic, so that I could check the pins? The solder joint that I see is on the horizontal side between 6 and 7 from right.
- symfen
-
- Offline
Less
More
- Posts: 9
05 May 2017 19:09 #62045
by symfen
Replied by symfen on topic Devo 10: strange link between Thrust and Rudder
I have used solder wick to clean the contacts at the low side of the ARM-chip. After reinstall of the 4in1-module I got an error (CYSFR9... missing). But after once more dismounting and remounting, the deviation 5.0 worked with all 4 channels showing the right behaviour. It seems to me, that my Devo-10 has not been very carefully soldered (see photo: solder paste on the low side).
Problem: How to bind to Syma X5C (the protocol selected is the *SymaX, when pushing ENT on Re-Init, nothing happens. Is that another hardware problem?
Problem: How to bind to Syma X5C (the protocol selected is the *SymaX, when pushing ENT on Re-Init, nothing happens. Is that another hardware problem?
- symfen
-
- Offline
Less
More
- Posts: 9
08 May 2017 13:10 #62140
by symfen
Replied by symfen on topic Devo 10: strange link between Thrust and Rudder
I would like to congratulate this open source group for their excellent work! After some time of working, one realizes, what great environment this deviation software is. This is another example of the advantages of open source development. Everybody can contribute! And the results are much more convincing than the commercially available TX-Software.
Current state of my TX after some days of experimenting, I can report the following behaviour:
1) Syma X5C, Eachine E010 and H8mini can be bound. Very good.
2) The strange hw-coupling between thrust and rudder has not really vanished, but is intermittent. Normally, when switching on the TX, the coupling is there, but when flying (with rotation of the Multi) it seems, that there is a probability, that the rudder is switched to independent control by the right hor stick (mode 3). What produces this change is not clear at all.
3) After power off, the coupling is coming again, very strange!
Current state of my TX after some days of experimenting, I can report the following behaviour:
1) Syma X5C, Eachine E010 and H8mini can be bound. Very good.
2) The strange hw-coupling between thrust and rudder has not really vanished, but is intermittent. Normally, when switching on the TX, the coupling is there, but when flying (with rotation of the Multi) it seems, that there is a probability, that the rudder is switched to independent control by the right hor stick (mode 3). What produces this change is not clear at all.
3) After power off, the coupling is coming again, very strange!
- FDR
-
- Offline
08 May 2017 14:00 #62149
by FDR
Replied by FDR on topic Devo 10: strange link between Thrust and Rudder
I think you still have some hardware problems.
For example the flux residue can conduct, and explain your still existing link.
Try to clean the microcontroller's legs with alcohol.
To be honest those pots have low enough resistance (usually 5kOhm) so such small current leaks shouldn't exist until your wires and contacts are good.
For example the flux residue can conduct, and explain your still existing link.
Try to clean the microcontroller's legs with alcohol.
To be honest those pots have low enough resistance (usually 5kOhm) so such small current leaks shouldn't exist until your wires and contacts are good.
- symfen
-
- Offline
Less
More
- Posts: 9
08 May 2017 19:45 #62170
by symfen
Replied by symfen on topic Devo 10: strange link between Thrust and Rudder
further observations:
a quick shutdown of the the TX does not destroy the normal rudder function, but a longer shutdown brings back the connection from thrust to rudder (say half an hour or so)!
I think, that there is a uF-capacitor which produces this behaviour. the question is, which capacitor might be responsible.
After flying for a while, the rudder works ok again, but I don't know how long it takes systematically.
a quick shutdown of the the TX does not destroy the normal rudder function, but a longer shutdown brings back the connection from thrust to rudder (say half an hour or so)!
I think, that there is a uF-capacitor which produces this behaviour. the question is, which capacitor might be responsible.
After flying for a while, the rudder works ok again, but I don't know how long it takes systematically.
- symfen
-
- Offline
Less
More
- Posts: 9
09 May 2017 10:44 #62191
by symfen
Replied by symfen on topic Devo 10: strange link between Thrust and Rudder
Finally, I have found the error: today, I wanted to measure the voltages across the RUD-potentiometer. I used a very thin probe and injected it into the contacts of the RUD connector. I felt, that the contacts were moving slightly and after powering up, I realized, that the RUD behaves now as it should. For test, I removed the RUD connector completely: now, the RUD behaved exactly as in the first tests. So, my conclusion is: the RUD signal was induced by the trace from the adjacent TRU trace, which runs along on about 5-10 centimeters. Since this capacitive coupling is weak, but the ADC-Input of the processor has high impedance, the RUD behaved as reported earlier.
So, now, everything is working and I am finally capable of looking into the nice functionalities of Deviation (running the nightly build version 403c3b6).
BTW: I figured out, that, if the ADC-input was damaged, I could use e.g. AUX4 or AUX5 as RUD input by lengthening the wires. But now, this is not necessary. But I have learned quite something about DEVO 10.
So, now, everything is working and I am finally capable of looking into the nice functionalities of Deviation (running the nightly build version 403c3b6).
BTW: I figured out, that, if the ADC-input was damaged, I could use e.g. AUX4 or AUX5 as RUD input by lengthening the wires. But now, this is not necessary. But I have learned quite something about DEVO 10.
Time to create page: 0.216 seconds
-
Home

-
Forum
-
General
-
General Discussions
- Devo 10: strange link between Thrust and Rudder