I have an interesting challenge for this group. I'm looking for a way to be able to fly multiple planes over DSM2 from a single TX. This is part of a project to facilitate youth groups to be able to build and fly planes together at low cost.
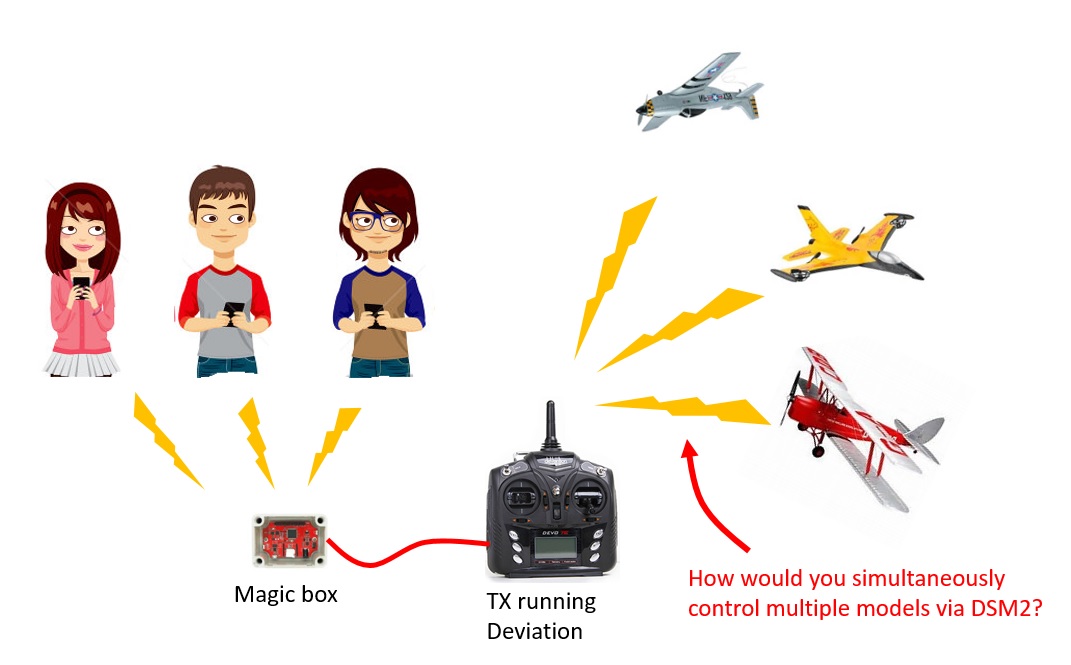
The way I imagine this working is depicted in the image below. Assume that cell phones would act as controllers that would talk to a magic box that can interface with a TX running Deviation and send it input commands. I'm pretty sure this is possible... But I don't understand the DSM2 protocol or deviation source well enough to know how to independently control multiple planes from a single TX module. Someone on the
rcgourps forms had some success
using a spectrum dsm module, but support was limited by the modules implementation.
Since Deviation runs its own DSM2 protocol,
how would you do it?
What would be the limitations / challenges of such and approach?
Your input is greatly appreciated!
-Corom