
Align T-Rex 150 DFC - Beginner Settings
- Tom Z
-
Topic Author
- Offline
- No negative pitch for normal mode so you don’t slam the heli down if you pull the stick down to fast. Don’t fly outside in wind in normal mode. You won’t be able to pull the heli down if the wind takes the heli.
- Lower Pitch Travel Adjustment to make the heli tamer
- Low dual rates and positive expo to tame the heli down
- Throttle hold on the RUDD D/R switch
- 7 Point Throttle and Pitch Curves
- TX Power=100mW
- Channels=7
- Protocol=DSMX
- No Fixed ID
- Stick Mode 2 If you need Stick Mode 1, 3, or 4 load the model into your transmitter then change the Stick Mode in the transmitter settings.
If you fly outside in wind use ST- 1 or ST- 2 which have full pitch curves which can pull the heli down in wind.
Model 20 is for deviation firmware v4 and the DEVO 6/6S/8/8S/10/12/12S.
* This model will not work for deviation firmware v2.1 or v3.
Model 20-2 has Zero Degree Pitch when throttle hold is on.
This will help minimize damage in a crash as the swash and blades will be at mid stick zero degrees pitch.
This will also help prevent a boom strike.
The swash does not move when TH is on.
If you want control of the swash in TH to help you land in a crash don’t use this model use Model 20 instead.
Set your ESC Li-po Cell Count setting to "AUTO". Default setting is 2 CELL.
ESC Settings
Functions
6. Li-Po Cell Count - Make sure to set this to "Auto".
Do not use the "2S" setting. You will have an extreme power/headspeed loss using the default "2S" setting.
NORM - 0% 30% 50% 55% 60%
ST- 1 - 70% 68% 65% 68% 70%
ST- 2 - 80% 77% 74% 77% 80%
Throttle Hold is active on RUDD D/R switch
Pitch Curve
Normal: No negative pitch. Zero degrees pitch at mid stick.
ST-1: Full +/- 3D pitch curve. Zero degrees pitch at mid stick.
ST-2: Full +/- 3D pitch curve. Zero degrees pitch at mid stick.
Gyro Gain - These are the values I used then converted them to the deviation values.
Mix Switch
Pos 0: 65%
Pos 1: 70%
Pos 2: 75%
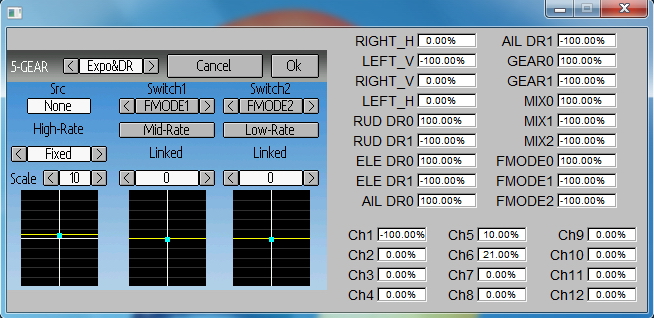
DR/EXPO
Adjust D/R and EXPO to your personal preference.
Switch Position
0- ELEV D/R = 50% EXP +30%
0- AILE D/R = 50% EXP +30%
RUDD D/R = 100% EXP +15%
Switch Position
1- ELEV D/R = 70% EXP +30%
1- AILE D/R = 70% EXP +30%
RUDD D/R = 100% EXP +15%
Download the Configuration Settings File.
Right click the "model.ini " and select "Save Target As" or "Save Link As" depending if you are using IE or Firefox.
Install the configuration settings file into your models folder (See my How to video below).
This will over-right the current file so make sure that model slot doesn’t
have a model being used in it. If it does rename the configuration settings file
to another number that you have free.
Example: The file you downloaded is named model5 so change the “5" to another slot
number that you don’t have a model setup for. If you have model slot 6 open rename the file to model6
How to Import/Export Deviation Firmware Models
-
Please Log in or Create an account to join the conversation.
- jazzjohn
-
- Offline
- Posts: 69
Tom, It seems like I had to change the gyro gain to get it to bind. How did you convert the values to Deviation values?Tom Z wrote: Gyro Gain - These are the values I used then converted them to the deviation values.
Normal Flight: 55%
3D Flight: 50%
-
Also, the bind is very slow with my Devo 6s. The esc beeps about 20 times before it completes the bind.
Please Log in or Create an account to join the conversation.
- Tom Z
-
- Offline
Converting deVention values to deviation values
deviationtx.com/forum/how-to/2620-conver...-to-deviation-values
What did you have to change the gyro values to to get it to bind?
The slow binding might have to do with the T-Rex frame rate vs the deviation firmware frame rate.
I don't know what the deviation firmware frame rate is but here are the T-Rex frame Rates.
DSM2 Frame Rate: 22 ms
DSMX Frame Rate: 11 ms
Please Log in or Create an account to join the conversation.
- Tom Z
-
- Offline
www.rcgroups.com/forums/showpost.php?s=c...940518&postcount=714
Looks like I might have to increase the Gyro Gain in the model.
Also he used DSM2 instead of DSMX. I have DSMX set in the model.
Please Log in or Create an account to join the conversation.
- jazzjohn
-
- Offline
- Posts: 69
D =2*S -100
so 2*55 -100 = 10.
I changed it to 26 as a shot in the dark, and the tail held there but would not hold at all at 10.
So 26 in Deviation translates to 63 in Spek, right?
Please Log in or Create an account to join the conversation.
- jazzjohn
-
- Offline
- Posts: 69
Tom Z wrote: Just saw this post:
www.rcgroups.com/forums/showpost.php?s=c...940518&postcount=714
Looks like I might have to increase the Gyro Gain in the model.
Also he used DSM2 instead of DSMX. I have DSMX set in the model.
Please Log in or Create an account to join the conversation.
- jazzjohn
-
- Offline
- Posts: 69
Tom Z wrote: I made a Tutorial and I am still adding to it.
Converting deVention values to deviation values
deviationtx.com/forum/how-to/2620-conver...-to-deviation-values
What did you have to change the gyro values to to get it to bind?
The slow binding might have to do with the T-Rex frame rate vs the deviation firmware frame rate.
I don't know what the deviation firmware frame rate is but here are the T-Rex frame Rates.
DSM2 Frame Rate: 22 ms
DSMX Frame Rate: 11 ms
Please Log in or Create an account to join the conversation.
- Tom Z
-
- Offline
jazzjohn wrote: I see that you used the formula
D =2*S -100
so 2*55 -100 = 10.
I changed it to 26 as a shot in the dark, and the tail held there but would not hold at all at 10.
So 26 in Deviation translates to 63 in Spek, right?
That is correct. 63% gyro gain in Spektrum = 26% gyro gain in Deviation
I followed Aligns gyro settings in the manual and YouTube videos.
People on the forums are using settings close to these also.
Normal Flight: 55%
3D Flight: 50%
Deviation Values
Normal Flight: 10%
3D Flight: 0%
Here is a screen shot of my gyro settings.
I am going to increase them to 72% Spektrum value and see how it works for the binding problem.
You can try running in DSM2 and see if it binds faster. If it doesn't or if it doesn't bind at all go back to DSMX.
Please Log in or Create an account to join the conversation.
- rbe2012
-
- Offline
- So much to do, so little time...
- Posts: 1433
Maybe too late:jazzjohn wrote: Also, the bind is very slow with my Devo 6s. The esc beeps about 20 times before it completes the bind.
I think this is a question of correct trimming of the throttle channel (sounds like the esc goes into program mode). Make sure that you have trimmed the sticks and throttle trim set to center.
Please Log in or Create an account to join the conversation.
- jazzjohn
-
- Offline
- Posts: 69
Sometimes the orange satellite led stays flashing after bind and sometimes it's solid.(same with the stock Spektrum sat.) If I turn the heli on before the transmitter, the satellite does come on solid with binding.
Couldn't get the throttle range adjusted as per page 27 of the manual. I set up a linear curve form -100 to +100. I get continuous short beeps (as per step 3) but never get the 2 beeps that indicate the highest position was detected.
Tom: I am only running DMS2 since the two satellites I have are not DSMX.
Please Log in or Create an account to join the conversation.
- jazzjohn
-
- Offline
- Posts: 69
Please Log in or Create an account to join the conversation.
- jazzjohn
-
- Offline
- Posts: 69
Same results with Deviation. So something else is causing the slow bind.
I was wrong about the gyro setting affecting the binding. Doesn't seem to help or hurt.
Please Log in or Create an account to join the conversation.
- Tom Z
-
- Offline
I looked in the manual also and it says binding should take 5 seconds.
Should I leave the gyro values at Normal Flight, 55%, 3D Flight: 50%
Deviation Values - Normal Flight: 10% 3D Flight: 0% ?
Or should I leave them at 72% (44% Deviation Values) which is what I increased them to?
You said the tail would hold at the values I had before so a higher gyro value sounded good. Plus the guy on Rcgroups said he had to increase the gyro gain to get the heli to bind.
Please Log in or Create an account to join the conversation.
- jazzjohn
-
- Offline
- Posts: 69
When I had your original value of 10, the tail wouldn't hold. I've only been doing small hovers inside and have not really tested the tail-holding ability with pitch pumps, but it wouldn't even hold well enough for hovering.
I think the bind is flaky and it might have been a coincidence that his bound when he changed the gyro gain. I think he later had binding issues again and sent the bird back for a refund.
Please Log in or Create an account to join the conversation.
- Tom Z
-
- Offline
If you do test the tail-holding ability with pitch pumps let me know what values work good for you and I will match my model to them.
I don't have a T-Rex 150 so I can't test fly the gyro gains. I have to follow what Align recommends which sounds too low.
I tried Deviation Gyro Values 10% in my V120D02V2 and the tail wouldn't hold either.
Thanks.
Please Log in or Create an account to join the conversation.
- Tom Z
-
- Offline
Gyro Gain - These are the values I used then converted them to the deviation values.
Mix Switch
Pos 0: 55%
Pos 1: 65%
Pos 2: 75%
This covers a good range of values. The first is what Align recommends, the send one is what you found good, and the third one is a value I found people getting good results with on the forums.
Please Log in or Create an account to join the conversation.
- jazzjohn
-
- Offline
- Posts: 69
On the slow bind issue...
A couple of guys on HF have very fast binds and they're using DSMX. Another guy has very slow binds on 2 separate 150s and I believe he's using DSM2.
Not a large sample but there might be something there.
Please Log in or Create an account to join the conversation.
- Tom Z
-
- Offline
I just found out the Align manual was incorrect on the gyro values.
The model first posted gyro settings were:
Gyro Gain - These are the values I used then converted them to the deviation values.
Mix Switch
Pos 0: 55%
Pos 1: 65%
Pos 2: 75%
Updated model gyro settings are now:
Gyro Gain - These are the values I used then converted them to the deviation values.
Mix Switch
Pos 0: 65%
Pos 1: 70%
Pos 2: 75%
70% to 75% is the most common values used on the internet. Fine tune the gyro gain to meet your needs.
Please Log in or Create an account to join the conversation.
- Danker16
-
- Offline
- Posts: 11
I loaded this on my devo 10 with a align 150x GRS, in regards to channel 5 which is the gyro why is the src = AIL? shouldnt it be Ch5?
as for the pitch curve in normal model my heli takes off from beginning -100 to -60, at mid stick and above the pitch becomes negative and heli descends.
the Tx has gyro settings, the heli also has an advanced setup for gyro settings via bluetooth how do these two settings affect each other?
any suggestions?
Please Log in or Create an account to join the conversation.
- Danker16
-
- Offline
- Posts: 11
finally figuring out deviation! so much fun
thanks
Please Log in or Create an account to join the conversation.
-
Home

-
Forum
-
Model Configs, Templates, Skins
-
Model Configs
- Align T-Rex 150 DFC - Beginner Settings