Hi,
This is one of the most complex .ini I have made so far.
The bird itself is awesome, just google it, so I wanted to make the most of it. I have used a gyro to stabilize it, as the Messer's were notoriously difficult to fly and land.
TX: Devo 10, Aug nightly, Mode 2, 150mW
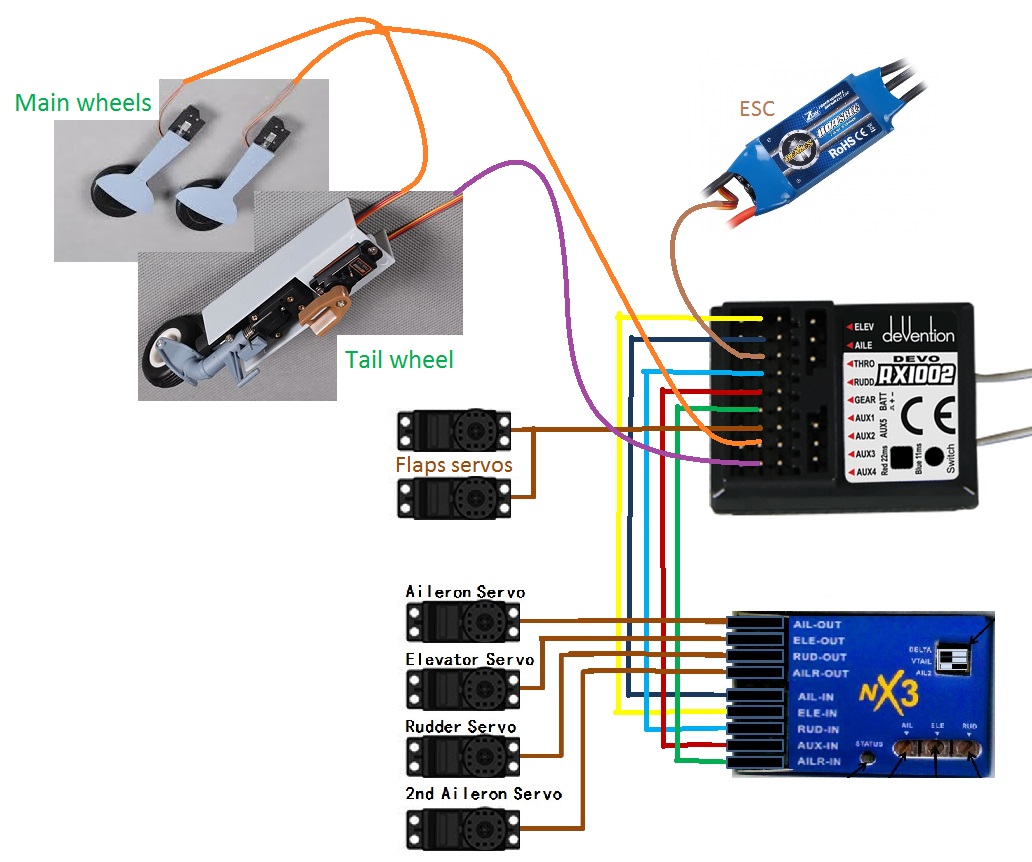
RX: Devo RX-1002
Gyro : NX3
The program contains:
RUDD D/R: throttle hold (TH), 0 hold, 1 go
GEAR: gears, 0 out, 1 in, not able to pull in while TH active
ELEV D/R: flaps, 0 up, 1 down, with endpoint trim for slow servos (L_Trim)
MIX: 3 position switch for the gyro control, 0:HH, 1:Rate, 2:off + trim adjustable master gain on same channel (R_Trim)(this method works with several gyros: Flymentor, Helicommand, "normal" 1D heli gyro...)
FMOD: 3 level range for all controls (ele-rud-ail), 0:33%, 1:66%, 2:100%
AILE D/R: Reset (1) for Throttle ON timer
-3 trims for the ele-rud-ail: respective trim buttons
-differential aileron with separate 11-point curves for dual servos
-Ail-Rud mixing (10%) for controlled turns
-separate turn servo control for tail wheel, for separate trim, fixed ratio, independent from FMOD
-states are displayed with icons for all switches and trims
The wiring is visible in the picture.
I just wanted to share, maybe someone can use it. Any comments are welcome
")
Cheers, bm