
- Posts: 799
which is MJX use protocol ?
- dc59
-
- Offline
Less
More
24 Jul 2015 13:58 #35915
by dc59
Hi Deal57,
It's good to see you here again,you help me a lot.
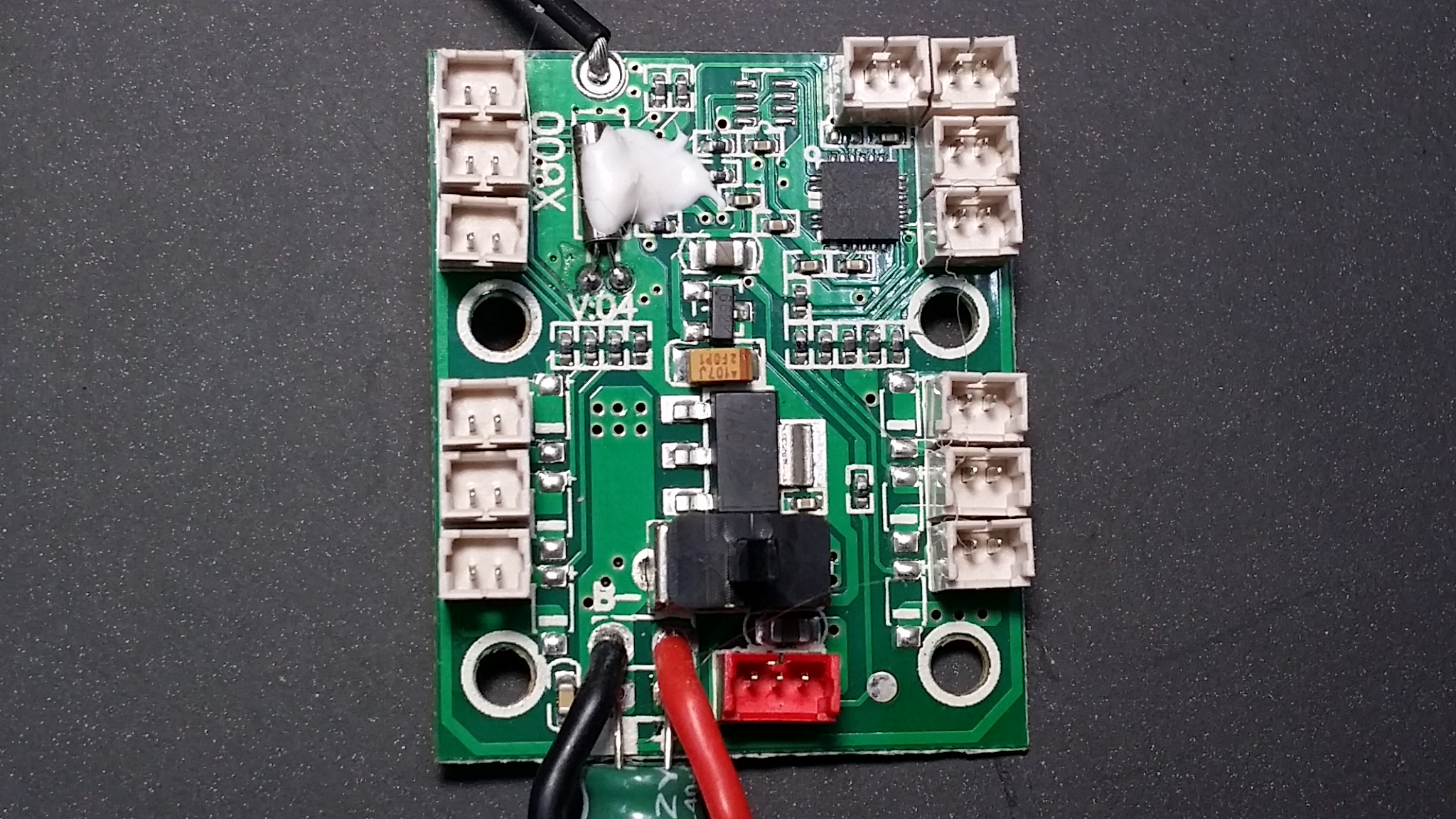
Here's X600 receiver board picture:
Front:
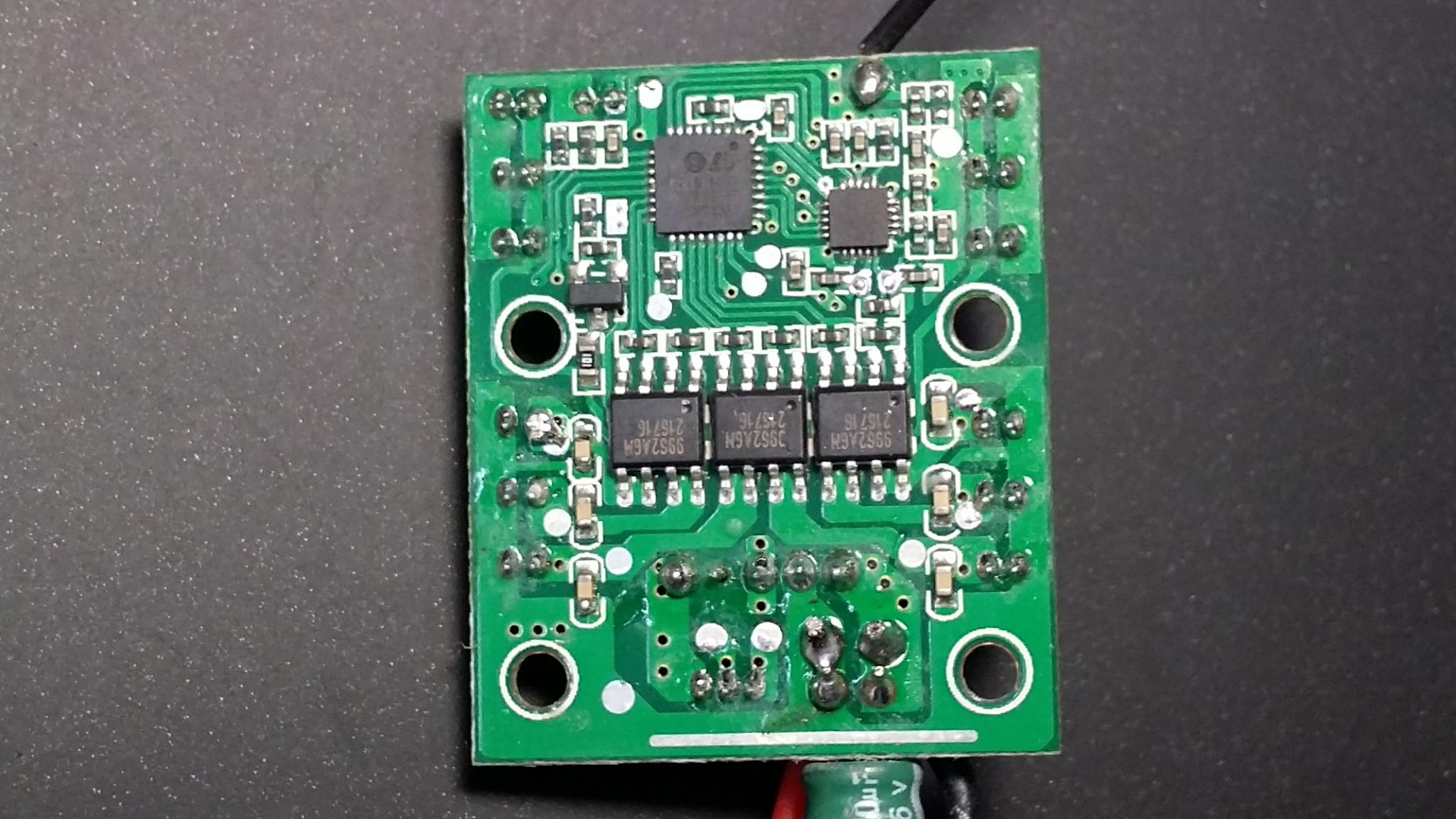
Back:
Thanks a lot.
Replied by dc59 on topic which is MJX use protocol ?
Deal57 wrote: A lot of these boards have test points that we can use instead of the chip pins. Can you post a photo of the board straight on both front and back?
Hi Deal57,
It's good to see you here again,you help me a lot.
Here's X600 receiver board picture:
Front:
Back:
Thanks a lot.
- dc59
-
- Offline
Less
More
- Posts: 799
24 Jul 2015 14:00 #35916
by dc59
That's great Seby, I know you are very busy!
Thanks anyway.
Replied by dc59 on topic which is MJX use protocol ?
SeByDocKy wrote:
dc59 wrote: Thanks Durete!
It's a good idea, if Seby is too busy to do this, I will try to find some soldering expert to help me!
I will try my best but it's true I am very busy... Will start to be better from sunday
That's great Seby, I know you are very busy!
Thanks anyway.
- Deal57
-
- Offline
Less
More
- Posts: 857
24 Jul 2015 15:17 #35917
by Deal57
Deviation Devo7e 3way switch mod, A7105, NRF24L01
Devo6s 2x2 switch mod, trim mod, haptic, multimodule, A7105, NRF24L01, CC2500
Devo12e 4-in-1 with voice mod -- it speaks!!
Replied by Deal57 on topic which is MJX use protocol ?
Wow. This doesn't lookeasy. Examining these photos, I don't see any test points on this board that we can use. CSN and CLK lead to via holes that could be easier to solder, but MOSI and MISO seem to go directly from the XN297 to the FC chip. With these really tiny solder points you would need really good eyes and a really steady touch!
I merged the front and back photos and set the back at 25% opacity so I could see if there were any traces we could use. This illustrates the best results I could get. It is POSSIBLE that there is something underneath the crystal on the back side that is connected to MOSI/MISO but I think it unlikely.
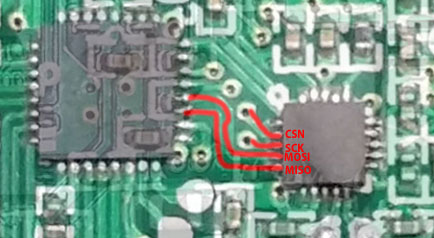
I merged the front and back photos and set the back at 25% opacity so I could see if there were any traces we could use. This illustrates the best results I could get. It is POSSIBLE that there is something underneath the crystal on the back side that is connected to MOSI/MISO but I think it unlikely.
Deviation Devo7e 3way switch mod, A7105, NRF24L01
Devo6s 2x2 switch mod, trim mod, haptic, multimodule, A7105, NRF24L01, CC2500
Devo12e 4-in-1 with voice mod -- it speaks!!
- dc59
-
- Offline
Less
More
- Posts: 799
24 Jul 2015 23:16 #35930
by dc59
Thanks Deal57!
I will check the connection.
Replied by dc59 on topic which is MJX use protocol ?
Deal57 wrote: Wow. This doesn't lookeasy. Examining these photos, I don't see any test points on this board that we can use. CSN and CLK lead to via holes that could be easier to solder, but MOSI and MISO seem to go directly from the XN297 to the FC chip. With these really tiny solder points you would need really good eyes and a really steady touch!
I merged the front and back photos and set the back at 25% opacity so I could see if there were any traces we could use. This illustrates the best results I could get. It is POSSIBLE that there is something underneath the crystal on the back side that is connected to MOSI/MISO but I think it unlikely.
Thanks Deal57!
I will check the connection.
- dc59
-
- Offline
Less
More
- Posts: 799
24 Jul 2015 23:19 #35931
by dc59
Replied by dc59 on topic which is MJX use protocol ?
Hi hexfet,
My stock TX is fixed, RTH is OK now and I captured SPI here,
www.mediafire.com/download/z2nrzzij24wsjdt
RTH must work in Headless mode!
My stock TX is fixed, RTH is OK now and I captured SPI here,
www.mediafire.com/download/z2nrzzij24wsjdt
RTH must work in Headless mode!
- hexfet
-
- Offline
Less
More
- Posts: 1971
27 Jul 2015 00:44 #36108
by hexfet
Replied by hexfet on topic which is MJX use protocol ?
Thanks! I've updated the test builds to add RTH control on channel 10. Not sure what it will do if activated without headless mode - probably tilt the quad aft.
- vasiliy_gr
-
- Offline
Less
More
- Posts: 67
27 Jul 2015 04:14 #36120
by vasiliy_gr
Replied by vasiliy_gr on topic which is MJX use protocol ?
As far as I understand among those MJX quads/hexes only X600 supports headless/RTH. Am I right or miss something?..
- dc59
-
- Offline
Less
More
- Posts: 799
27 Jul 2015 04:55 #36123
by dc59
I checked MJX China Tmall webstore , those copters support headless & RTH function:
X101
X300C
X400-V2 (I don't know the difference between V1 & V2.)
X600
detail.tmall.com/item.htm?spm=a1z10.5-b....erties=1627207:28335
Replied by dc59 on topic which is MJX use protocol ?
vasiliy_gr wrote: As far as I understand among those MJX quads/hexes only X600 supports headless/RTH. Am I right or miss something?..
I checked MJX China Tmall webstore , those copters support headless & RTH function:
X101
X300C
X400-V2 (I don't know the difference between V1 & V2.)
X600
detail.tmall.com/item.htm?spm=a1z10.5-b....erties=1627207:28335
- vasiliy_gr
-
- Offline
Less
More
- Posts: 67
27 Jul 2015 05:10 #36125
by vasiliy_gr
Replied by vasiliy_gr on topic which is MJX use protocol ?
Thank you for clarification. My X400 is exactly not V2 as it was purchased in early January. In even does not have connector for MJX's wifi-fpv camera.
- dc59
-
- Offline
Less
More
- Posts: 799
27 Jul 2015 13:11 #36143
by dc59
Test Bulid : b287c66
RTH function works very well ,there is no difference with or without headless activated.
Thanks Hexfet.
Replied by dc59 on topic which is MJX use protocol ?
hexfet wrote: Thanks! I've updated the test builds to add RTH control on channel 10. Not sure what it will do if activated without headless mode - probably tilt the quad aft.
Test Bulid : b287c66
RTH function works very well ,there is no difference with or without headless activated.
Thanks Hexfet.
- dc59
-
- Offline
Less
More
- Posts: 799
30 Jul 2015 00:29 #36338
by dc59
Hi Durete,
Did you get your X800?
Replied by dc59 on topic which is MJX use protocol ?
Durete wrote: Silently lurking at this thread...
I typed my PayPal password for an MJX X800 as soon I saw Hexfet writing on this thread
@Hexfet, are you on holidays?
Hi Durete,
Did you get your X800?
- Durete
-
- Offline
Less
More
- Posts: 610
30 Jul 2015 05:19 #36344
by Durete
Replied by Durete on topic which is MJX use protocol ?
Not yet, probably in about 10 days, but probably I will be on vacation ")
- goophoba
-
- Offline
Less
More
- Posts: 17
01 Aug 2015 06:15 - 01 Aug 2015 07:09 #36425
by goophoba
Replied by goophoba on topic which is MJX use protocol ?
Wow didn't know the MJX multis could be used with deviation. Awesome, I already have a couple!
*Edit*
Ok, just tried it. It connects great. Not sure if it this info is helpful, but using the same model ini (no fixed ID) for a x400 and x600 the delay is present on the x400, but not the x600. They both try to do a flip as soon as I move the stick but I was holding them so no flights yet (i've yet to set if the model ini properly, perhaps this weekend). Obviously I've only been able to observe the throttle so far.
*Edit*
Ok, just tried it. It connects great. Not sure if it this info is helpful, but using the same model ini (no fixed ID) for a x400 and x600 the delay is present on the x400, but not the x600. They both try to do a flip as soon as I move the stick but I was holding them so no flights yet (i've yet to set if the model ini properly, perhaps this weekend). Obviously I've only been able to observe the throttle so far.
Last edit: 01 Aug 2015 07:09 by goophoba.
- hexfet
-
- Offline
Less
More
- Posts: 1971
01 Aug 2015 16:18 #36435
by hexfet
Replied by hexfet on topic which is MJX use protocol ?
Interesting, perhaps they use different rf channels. What's the behavior if you fly the X400 with the X600 stock tx, and vice-versa?
Would you please try changing the "bit test" protocol option and check if it has any effect on the auto-flip behavior?
Would you please try changing the "bit test" protocol option and check if it has any effect on the auto-flip behavior?
- goophoba
-
- Offline
Less
More
- Posts: 17
03 Aug 2015 01:39 #36497
by goophoba
Replied by goophoba on topic which is MJX use protocol ?
Sure, I'll try it tomorrow.
- goophoba
-
- Offline
Less
More
- Posts: 17
03 Aug 2015 22:31 - 03 Aug 2015 23:01 #36513
by goophoba
Replied by goophoba on topic which is MJX use protocol ?
Alright so I've had a a couple hours to fly. The X 600 I've had for a while and I swear using the Devo makes it fly better, how much better, not much. The X 400 on the other hand, this is my first time actually getting it out to fly (as it just arrived during the week) and it is a bit annoying to fly no matter what transmitter is used.
Stock transmitters:
Both the X 400 and the X 600 stock transmitter being used for either quad produced the same flight results. Although the X 400 transmitter feels like it took a step down in quality when compared to the X 600 transmitter, like it has the usable but rejected parts, but I won't get into that here.
Bit rate:
With the bit rate turned on both quads become very subdued. Also no auto flips. After seeing that I pulled the scale back to 90 but I still got flipping action when I moved the stick too far. Once I put the scale at 88, it flies perfect. An expo of 25 – 35 just made everything better. I suppose I must of been manhandling the stick the other day while trying not to nip my fingers with the blades while holding onto the running quad in my in my hand. Same results with the X 400.
Now the fixed IDs:
The X 600 works great as long as I don't use any fixed ID. As soon as introduce a fixed ID everything just start lagging.Getting a proper bind with a fixed ID is difficult and sometimes just won't happen depending on the ID. Sometimes it seems like it will bind on some random fixed ID, then as soon as I move the stick the lights start flashing and I get no response. I was trying random numbers, mostly various amounts of 1's. I did manage to bind a fixed ID of 1111 once, but only once. The lag for the fixed ID of 1111 was just awful, worse than on ID 13 which seems semi-reliable but still had some amount of lag. It almost seemed like the X 400 on ID 13 had more lag than the X 600 on the ID 13. No other ID showed any noticeable difference to my eyes but then again it was fairly windy so it was difficult to tell what was wind and what was lag. I was mostly relying on differences in yaw response.
X400 annoying roll rate:
I'm just adding this here in case anybody reading this is thinking about buying an X 400 considering we can now use MJX quads with the Devo transmitters. Don't, just don't. Go buy the X 600. The X 400 is slow. When using a stock transmitter or no fixed ID on the devo, the X 400 response time is fine. What is slow is the speed at which it pitches over to one side or the other, the roll. The X 400 takes a considerable amount of time to pitch fully into a angle when asked to compared to the X 600, no matter what transmitter is used. With the X 600, when I move the gimbal, the quad pretty much keeps up with my fingers as far as rolling and pitching. The X 400 takes forever when you compare the two. I got the X 400 stuck in a tree twice today because it needs a considerably larger distance in order to pitch over to preform a stop while moving full speed. Everything else is great but that. It's almost as annoying as a slow yaw. Get a X 600, not a X 400, the X 600 flies better, but it is 2S. Saving grace, I yaw steer more than I roll. Perhaps all that is too harsh and I'm just doing something wrong, but it is a little slow. *Disclosure, my view is skewed: I like a fast response time and sharp quick movements from my RC's. What some people think are fast movements, I tend to prefer*
Stock transmitters:
Both the X 400 and the X 600 stock transmitter being used for either quad produced the same flight results. Although the X 400 transmitter feels like it took a step down in quality when compared to the X 600 transmitter, like it has the usable but rejected parts, but I won't get into that here.
Bit rate:
With the bit rate turned on both quads become very subdued. Also no auto flips. After seeing that I pulled the scale back to 90 but I still got flipping action when I moved the stick too far. Once I put the scale at 88, it flies perfect. An expo of 25 – 35 just made everything better. I suppose I must of been manhandling the stick the other day while trying not to nip my fingers with the blades while holding onto the running quad in my in my hand. Same results with the X 400.
Now the fixed IDs:
The X 600 works great as long as I don't use any fixed ID. As soon as introduce a fixed ID everything just start lagging.Getting a proper bind with a fixed ID is difficult and sometimes just won't happen depending on the ID. Sometimes it seems like it will bind on some random fixed ID, then as soon as I move the stick the lights start flashing and I get no response. I was trying random numbers, mostly various amounts of 1's. I did manage to bind a fixed ID of 1111 once, but only once. The lag for the fixed ID of 1111 was just awful, worse than on ID 13 which seems semi-reliable but still had some amount of lag. It almost seemed like the X 400 on ID 13 had more lag than the X 600 on the ID 13. No other ID showed any noticeable difference to my eyes but then again it was fairly windy so it was difficult to tell what was wind and what was lag. I was mostly relying on differences in yaw response.
X400 annoying roll rate:
I'm just adding this here in case anybody reading this is thinking about buying an X 400 considering we can now use MJX quads with the Devo transmitters. Don't, just don't. Go buy the X 600. The X 400 is slow. When using a stock transmitter or no fixed ID on the devo, the X 400 response time is fine. What is slow is the speed at which it pitches over to one side or the other, the roll. The X 400 takes a considerable amount of time to pitch fully into a angle when asked to compared to the X 600, no matter what transmitter is used. With the X 600, when I move the gimbal, the quad pretty much keeps up with my fingers as far as rolling and pitching. The X 400 takes forever when you compare the two. I got the X 400 stuck in a tree twice today because it needs a considerably larger distance in order to pitch over to preform a stop while moving full speed. Everything else is great but that. It's almost as annoying as a slow yaw. Get a X 600, not a X 400, the X 600 flies better, but it is 2S. Saving grace, I yaw steer more than I roll. Perhaps all that is too harsh and I'm just doing something wrong, but it is a little slow. *Disclosure, my view is skewed: I like a fast response time and sharp quick movements from my RC's. What some people think are fast movements, I tend to prefer*
Last edit: 03 Aug 2015 23:01 by goophoba. Reason: typo, grammar
- Antfurn
-
- Offline
Less
More
- Posts: 10
03 Aug 2015 23:23 #36515
by Antfurn
Replied by Antfurn on topic which is MJX use protocol ?
Hi, I just got X900 today and just like goophoba, found TX to be of much worse quality that the ones I've had (the same shape and function) before.
So I loaded up deviation build devo7e-v4.0.1-b287c66 and gave that a go.
I had to set the scaling to 89 for both Ali & Ele to stop the auto flips at the end of the travel.
Other than that I've made no changes to set rates or anything.
I did remove the fixed ID.
Here's my model ini file:
Thanks for the test build and great work on all these protocols. Long may it continue...
Antony
So I loaded up deviation build devo7e-v4.0.1-b287c66 and gave that a go.
I had to set the scaling to 89 for both Ali & Ele to stop the auto flips at the end of the travel.
Other than that I've made no changes to set rates or anything.
I did remove the fixed ID.
Here's my model ini file:
Thanks for the test build and great work on all these protocols. Long may it continue...
Antony
- goophoba
-
- Offline
Less
More
- Posts: 17
03 Aug 2015 23:36 - 03 Aug 2015 23:40 #36517
by goophoba
How is the X900? I really like the idea of a super mini X600 for around the house. At that size how's if fly? Slow-ish yaw like a cx10? Can't tell too much in vids.
Replied by goophoba on topic which is MJX use protocol ?
Antfurn wrote: Hi, I just got X900 today and just like goophoba, found TX to be of much worse quality that the ones I've had (the same shape and function) before.
How is the X900? I really like the idea of a super mini X600 for around the house. At that size how's if fly? Slow-ish yaw like a cx10? Can't tell too much in vids.
Last edit: 03 Aug 2015 23:40 by goophoba.
- Antfurn
-
- Offline
Less
More
- Posts: 10
04 Aug 2015 00:10 #36519
by Antfurn
Replied by Antfurn on topic which is MJX use protocol ?
Yes very like the cx10, except the extra weight of the bigger lipo and motors makes for slower climb out 
It's still fun to fly and lots of novelty factor")
It's still fun to fly and lots of novelty factor
- Zaphod
-
- Offline
Less
More
- Posts: 103
04 Aug 2015 06:00 #36527
by Zaphod
Replied by Zaphod on topic which is MJX use protocol ?
Hi guys,
I've just upgraded to the latest nightly release - deviation-devo10-v4.0.1-ef0d76d.zip
Then after reading this thread thought I'd install this - deviation-devo10-v4-0-1-c8a62f7-zip so I can fly my MJX X900.
I have the Bayang protocol but not the MJX protocol. What have I done wrong?
Huge thanks to all you guys developing these protocols! The X900 is the only thing I can't fly right now with my Devo 10!
Thanks
I've just upgraded to the latest nightly release - deviation-devo10-v4.0.1-ef0d76d.zip
Then after reading this thread thought I'd install this - deviation-devo10-v4-0-1-c8a62f7-zip so I can fly my MJX X900.
I have the Bayang protocol but not the MJX protocol. What have I done wrong?
Huge thanks to all you guys developing these protocols! The X900 is the only thing I can't fly right now with my Devo 10!
Thanks
Time to create page: 0.164 seconds
-
Home

-
Forum
-
Development
-
Protocol Development
- which is MJX use protocol ?