10. Protocoles¶
Certains protocoles ont des configurations spécifiques ou certaines limitations. Chaque protocole est décrit ci-dessous. Un astérisque (‘*’) avant le nom du protocole dans le titre du paragraphe signifie qu’un module matériel doit être ajouté à l’émetteur pour permettre le support du protocole. Sur l’affichage de l’émetteur un astérisque informe que Deviation ne détecte pas le module requis (non installé, hardware.ini incorrect ou autre problème de communication avec le module). D’autres informations peuvent être trouvées dans le “Guide d’installation de Module”.
http://www.deviationtx.com/wiki/#hardware_modifications
10.1. protocole : DEVO¶
Le protocole DEVO est installé afin de garder la compatibilité avec les recepteurs Walkera DEVO. Ce protocole supporte jusqu’à 12 canaux. Il supporte aussi bien l’auto-appairage que l’appairage manuel par identifiant fixe. Si l’identifiant fixe (ID fixe) est réglé sur “Néant” alors l’émetteur utilisera l’autoappairage à chaque mise sous tension. Si l’identifiant a une valeur, alors le récepteur doit être appairé la première fois en utilisant le bouton “Appairer”. Notez que l’identifiant fixe n’est qu’un élément de la procédure d’appairage. Deux émetteurs avec la même ID ne peuvent contrôler le même modèle.
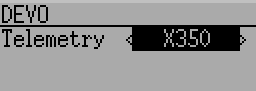
The DEVO protocol also supports enabling/disabling the telemetry capability. This option is accessed by pressing the Protocol spin-box when DEVO is shown. The options are Std (standard format), X350 (Walkera QR-X350 format), and Off.
Les champs suivants sont disponibles dans la télémétrie DEVO. Notez que tous les modèles ou récepteurs ne rapportent pas toutes les données et que des données nécessitent des modules supplémentaires pour être disponibles.
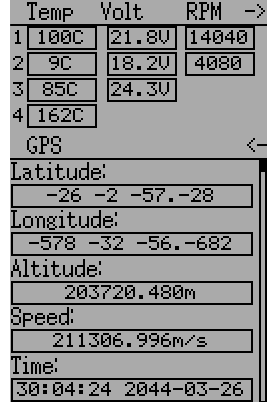
- T° 1/2/3/4*: Données de température. Elles peuvent être celles de la batterie, du moteur, ou la température ambiante.
- Volt1/2/3: Données de voltage pour la batterie de réception et/ou des batteries externes.
- T/mn1/2: Vitesses de rotation moteur en tours/minute.
- Données GPS: Position en cours, vitesse et altitude provenant du module GPS.
10.2. Protocole : WK2801¶
Le protocole WK2801 est utilisé pour commander les anciens modèles Walkera. Les précédents modèles de cette marque utilisaient trois protocoles similaires mais non identiques:WK2801, WK2601, WK2401. Ils correspondent en gros au nombre de canaux supportés mais de nombreux nouveaux récepteurs 6 canaux admettent le protocole WD2801. Il est recommandé de toujours essayer d’abord le protocole WK2801 sur les anciens récepteurs Walkera avant d’essayer les protocoles 2601 et 2401, car le protocole WK2801 est supérieur en bien des points. Le protocole WK2801 supporte jusque 8 canaux, l’appairage automatique aussi bien que le manuel. Si l’ID Fixe est mis sur “Néant” alors l’émetteur lancera la procédure d’auto appairage à chaque mise sous tension. Si l’ID Fixe a une valeur alors le récepteur devra être appairé manuellement la première fois en utilisant le bouton “Appairer” après quoi il devrait rester appairé.
10.3. Protocole: WK2601¶
Le protocole WK2601 est utilisé pour commander les anciens modèles Walkera. Les précédents modèles de cette marque utilisaient trois protocoles similaires mais non identiques :WK2801, WK2601, WK2401. Ils correspondent en gros au nombre de canaux supportés mais de nombreux nouveaux récepteurs 6 canaux admettent le protocole WD2801. Il est recommandé de toujours essayer d’abord le protocole WK2801 sur les anciens récepteurs Walkera avant d’essayer les protocoles 2601 et 2401, car le protocole WK2801 est supérieur en bien des points. Le protocole WK2601 supporte jusque 7 canaux, l’appairage ne peut se faire qu’automatiquement. L’ID Fixe peut être utilisé mais n’empêche pas l’auto-appairage à la mise sous tension.
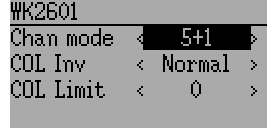
Le protocole WK2601 possède différentes options. Elle sont accessibles en appuyant sur la boite de sélection lorsque Wk2601 est affiché.
Mode canaux [Chan mode]: Indique comment les canaux sont traités :
- 5+1: AIL, PROF, GAZ, DERIVE, GYRO (can. 7) sont proportionnels. TRAIN (can. 5) est tout ou rien. Le canal 6 est désactivé.
- Heli : AIL, PROF, GAZ, DERIVE, GYRO sont proportionnels. TRAIN (can. 5) est tout ou rien. Le canal 6 est désactivé. le pas ( can 6) est lié à GAZ . Si Can6 >= 0, le récepteur applique une courbe de type 3D -en V- au Gaz . Si Can6 < 0, le récepteur applique une courbe normale au canal Gaz. La valeur du canal 6 détermine le ratio entre Gaz et Pas.
- 5+1: AIL, PROF, GAZ, DERIVE, Pas (can6) GYRO (can. 7) sont proportionnels. TRAIN (can. 5) est tout ou rien. Ce mode est fortement expérimental.
- Sens pas: Inversion du sens du servo de pas collectif.
- Limite de pas: Fixe la valeur limite du canal de pas collectif.
10.4. Protocole : WK2401¶
Le protocole WK2401 est utilisé pour commander les anciens modèles Walkera. Les précédents modèles de cette marque utilisaient trois protocoles similaires mais non identiques :WK2801, WK2601, WK2401. Ils correspondent en gros au nombre de canaux supportés mais de nombreux nouveaux récepteurs 6 canaux admettent le protocole WD2801. Il est recommandé de toujours essayer d’abord le protocole WK2801 sur les anciens récepteurs Walkera avant d’essayer les protocoles 2601 et 2401, car le protocole WK2801 est supérieur en bien des points. Le protocole WK2401 supporte jusque 4 canaux, l’appairage ne peut se faire qu’automatiquement. L’ID Fixe peut être utilisé mais n’empêche pas l’auto-appairage à la mise sous tension.
10.5. Protocole : DSM2¶
Le protocole DSM2 est utilisé pour commander de nombreux récepteurs des marques Spektrum© et JR© , mais aussi d’autres modèles utilisant ce protocole. Il supporte jusque 12 canaux. Note: certains récepteurs ayant moins de 8 canaux requièrent que l’émetteur n’envoie que 7 canaux ou moins. S’assurer que le nombre de canaux est approprié pour le récepteur. L’auto-appairage n’est pas possible avec ce protocole. Si l’ID Fixe est mis à “Néant” alors l’émetteur utilisera un identifiant qui lui est spécifique. Il est nécessaire d’appairer chaque nouveau modèle avant la première utilisation.
Notez que l’appairage ne s’arrête pas avant que vous bougiez les ailerons ou la profondeur. C’est pour que vous puissiez appuyer sur le bouton Sécurités [failsafe] sur certains récepteurs DSM pour régler les valeurs de sécurités.

Le protocole DSM2 permet d’activer ou désactiver la télémétrie. On accède à cette fonction en appuyant sur la boite de sélection quand DSM2 est affiché.
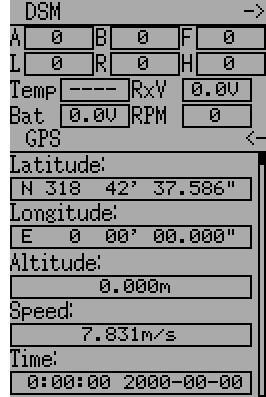
Les champs suivants sont disponibles dans la télémétrie DEVO. Notez qu’un module de télémétrie dédié et des capteurs sont nécessaires pour capter les données.
- Affaiblissement A/B/L/R: [FadesA/B/L/R] : Le nombre de fois que chaque antenne reçoit un signal faible. Idéalement ces nombres devraient être similaires, indiquant une réception égale de chaque antenne.
- Interruption [Loss]: le nombre de pertes totales du signal durant le vol.
- Maintiens: [Holds]: Le nombre de fois où le système de Sécurités [failsafe] a fonctionné en raison d’une perte de signal durant le vol.
- RxV et Bat : Le voltage de la batterie de réception et d’une batterie externe.
- T/mn : Vitesse de rotation du moteur.
- T° : Température prise par un capteur extérieur.
- Données GPS: Position en cours, vitesse et altitude provenant du module GPS.
10.6. Protocole : DSMX¶
Le protocole DSMX est utilisé pour commander de nombreux récepteurs des marques Spektrum™ et JR™ , mais aussi d’autres modèles utilisant ce protocole. Il supporte jusque 12 canaux. Note: de nombreux récepteurs ayant moins de 8 canaux requièrent que l’émetteur ne transmette que 7 canaux ou moins. S’assurer que le nombre de canaux est approprié pour le récepteur. L’auto-appairage n’est pas possible avec ce protocole. Si l’ID Fixe est mis à “Néant” l’émetteur utilisera un identifiant qui lui est spécifique. Il est nécessaire d’appairer chaque nouveau modèle avant la première utilisation.
Notez que l’appairage ne s’arrête pas avant que vous bougiez les ailerons ou la profondeur. C’est pour que vous puissiez appuyer sur le bouton Sécurités [failsafe] sur certains récepteurs DSM pour régler les valeurs de sécurités.
Notez que contrairement aux émetteurs Spektrum™ ou JR™, Deviation ne sélectionnera pas automatiquement entre DSM2 et DSMX. L’utilisateur doit choisir quel protocole il veut utiliser.

Le protocole DSMX permet d’activer ou désactiver la télémétrie. On accède à cette fonction en appuyant sur la boite de sélection quand DSM2 est affiché.
La liste des champs de télémétrie de DSMX sont identiques à ceux du protocole DSM2 et sont documentés dans la section Protocole : DSM2.
10.7. Protocole : J6Pro¶
Le protocole J6Pro est utilisé pour prendre en charge les modèles Nine Eagles™. Seuls les modèles compatibles J6Pro sont utilisables. De nombreux modèles anciens à 4 canaux de chez Nine Eagles™ utilisaient un protocole différent non supporté. Le protocole J6Pro supporte jusqu’à 12 canaux, mais à ce jour seuls des modèles avec 6 canaux ont été testés. L’auto-appairage n’est pas possible avec ce protocole. Si l” ID fixe est définie à Néant, une ID spécifique à l’émetteur est utilisée. Il est nécessaire d’appairer manuellement chaque modèle avant la première utilisation.
10.8. Protocole: WFLY¶
Le protocole WFLY supporte les récepteurs WFLY comme les WFR04S, WFR07S et WFR09S.
Le protocole accepte jusqu’à 9 canaux. L’ordre par défaut des canaux est AETR - Ailerons Profondeur Gaz Direction.
10.9. Protocole: *Flysky¶
Le protocole Flysky est utilisé pour commander les récepteurs Turnigy/Flysky ainsi que quelques modèles utilisant ce protocole AFHDS (WL V911, Xieda 9958, etc). NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole Flysky supporte jusqu’à 12 canaux et l’appairage automatique ou manuel. Si l’ID fixe est définie à “Néant” l’émetteur tentera d’effectuer un appairage automatique avec le récepteur à chaque allumage de l’émetteur. Si une ID fixe est définie, le récepteur doit être appairé manuellement une fois en utilisant le bouton “Réinit”; après quoi il devrait rester appairé.
Le protocole Flysky prend également en charge les extensions WLToys du protocole. On y accède en pressant la boite de sélection du protocole quand celui ci est affiché.
V9x9: Permet les extensions pour les quadricoptères WLToys V939, V949, V959, v969, etc.
- Les lumières sont contrôlées par le canal 5.
- La vidéo est contrôlée par le canal 6.
- La camera est contrôlée par le canal 7
- Le Flip est contrôlé par le canal 8.
V6x6: Permet les extensions pour les quadricoptères WLToys V636 ry V686
- Les lumières sont contrôlées par le canal 5.
- Le Flip est contrôlé par le canal 6.
- La camera est contrôlée par le canal 7
- La vidéo est contrôlée par le canal 8.
- Le mode à contrôle d’orientation intelligent [Headless] est contrôlé par le canal 9.
- Le mode “Retour à la maison” [RTH] est contrôlé par le canal 10.
- Les calibrations X et Y sont contrôlées respectivement par les canaux 11 et 12.
V912: Permet les extensions pour les hélicoptères V912, V913 et V915.
Notez que si ces canaux sont assignés à un interrupteur, ouvrir l’interrupteur modifie l’état, et fermer l’interrupteur n’a pas d’effet. Donc pour allumer les lumières, basculer l’interrupteur assigné au canal 5 de fermé à ouvert. Basculer l’interrupteur à fermé n’a pas d’effet. Basculer de nouveau a ouvert éteint alors les lumières.
10.10. Protocole : *AFHDS-2A¶
Le protocole AFHDS-2A est utilisé pour contrôler les récepteurs Turnigy/Flysky AFHDS 2A. NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole AFHDS-2A supporte jusqu’à 14 canaux et nécessite un appairage manuel. Le récepteur doit être appairé manuellement une fois en utilisant le bouton “Réinit”; après quoi il devrait rester appairé.
Options configurables sur la page AFHDS-2A :
- Sorties:[Outputs] : Détermine le type de sortie sur le récepteur, PWM+IBUS, PPM+IBUS, PWM+SBUS ou PPM+SUBS.
- Servo Hz: Fixe le taux de rafraichissement du PWM entre 50 Hz et 400 Hz.
- Sortie LQI: -LQi Output- Envoie le LQI -Link Quality Indicator, Indicateur de qualité de lien sur un canal optionnel.
- Freq-fine: Ajustement du décalage de fréquence. Intervalle -300 à 300. Ajuste les différences entre les modules A7105. La valeur par défaut est 0. la valeur télémétrique LQI (qualité d’appairage) peut être utilisée comme guide pour cet ajustement fin de fréquence.
La télémétrie est prise en charge.
10.11. Protocole: *Hubsan4¶
Ce protocole est utilisé sur les Hubssan-X4 quadricoptères séries H107 et H111 et hélicoptères H101,H102, H201, H202 et des Estes Proto X (mais pas le Proto X SLT). (format standard)
Ce protocole est utilisé sur les Hubsan H301F, H302F, H303F et H304F ( format H301)
Ce protocole est utilisé sur les Hubsan H501S, H122D and H123D ( format H501)
NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole Hubsan4 supporte jusqu’à 13 canaux, et seul le format standard accepte l’auto-appairage. L” ID fixe peut être utilisée, mais n’empêche pas l’auto-appairage durant la mise sous tension. Les 4 premiers canaux représentent ailerons, profondeur, gaz et dérive . Les canaux additionnels contrôlent les fonctions spéciales des quadricoptère.
Avec les formats H301 et H305 Il faut appairer manuellement chaque modèle avant la première utilisation.
- Le Canal 5 contrôle les Leds.
- Le canal 6 permet le mode “flip” ou le maintien d’altitude ou le mode stabilisé, en fonction de la version.
- Le canal 7 contrôle la mise sous/hors tension de la vidéo(H102) ou prend une photo..
- Le canal 8 prend une photo.
- Le canal 9 contrôle le mode de contrôle d’orientation intelligent - [headless}
- Le canal 10 active la fonction retour au départ.
- Le canal 11 permet le maintien GPS
- Le canal 12 détermine le mode Sport 1, Sport 2 ou Acro. (H123D)
- Le canal 13 permet le mode “flip”.
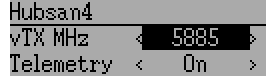
Options configurables sur la page Hubsan :
- vTX MHz: Définit la fréquence utilisée par l’émetteur vidéo du Hubsan HD107D (nécessite un récepteur 5.8 GHz susceptible de recevoir et d’afficher la vidéo).
- Télémetrie: Permet de recevoir le voltage de la batterie du modèle.
- Freq-fine: Ajustement du décalage de fréquence. Intervalle -300 à 300. Ajuste les différences entre les modules A7105. La valeur par défaut est 0.
10.12. Protocole: *Joysway¶
Le protocole Joysway prend en charge le yacht Carribean de Joysway, et le récepteur J4C12R utilisé dans des yachts Joysway Orion, Explorer, Dragon Force 65 et le catamaron Force2 60. Aucun autre modèle n’a été testé avec ce protocole, en incluant les versions aériennes du J4C12R. NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le Protocole Joysway supporte juqu’à 4 canaux, ne prend pas en charge l’auto-appairage, mais appairera à chaquedemande d’appairage. Si l” ID fixe est positionné sur Néant , une ID spécifique à l’émetteur est utilisée à sa place. Il faut appairer chaque modèle avant la première utilisation.
Le premier canal commande normalement les voiles et le deuxième le gouvernail, mais cela peut varier d’un modèle à l’autre.
10.13. Protocole: *Bugs3¶
Le protocole Bugs3 est utilisé pour controler les avions MJX Bugs3 et Bugs8 . NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Pour appairer, sélectionner le protocole Bugs3 et cliquer sur Appairer. Puis mettre l’avion sous tension. La boite de dialoguer d’appairage disparaitra si l’appairage est effectif. l” identification de la radio de l’avion est enregistrée dans le champ ID fixd. Ne pas changer cette valeur.
Canaux utilisés pour contrôler les fonctions. Fixer une valeur de canal plus grande que zéro pour activer.
- L’armement est contrôlé par le canal 5.
- Les lumières sont contrôlées par le canal 6.
- Le Flip est contrôlé par le canal 7.
- La camera est contrôlée par le canal 8
- Video is controlled by Channel 9
- Les modes Angle et Acro sont contrôlés par le canal 10. (>0 pour Angle)
Les fonctions de télémétrie supportées sont RSSI et alarme de voltage. Ils utilisent l’affichage de télémétrie Frsky. La force de signal est affichée dans le champ RSSI et le voltage de la batterie dans le champ VOLT. Les récepteurs Bugs3 affichent uniquement un voltage bon ou faible. Cela est traduit en VOLT1 par des valeurs de 8.4 pour bon et 6.0 pour mauvais.
10.14. Protocole: *Frsky-V8¶
Le protocole Frsky-V8 sert à contrôler les anciens récepteurs Frsky™ utilisant le protocole à sens unique. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole Frsky-V8 supporte jusqu’à 8 canaux et n’autorise pas l’auto-appairage. Si l” ID fixe est positionné sur Néant , une ID spécifique à l’émetteur est utilisée à sa place. Il faut appairer chaque modèle manuellement avant la première utilisation.
10.15. Protocole : *Frsky¶
Le protocole Frsky sert à contrôler les plus récents récepteurs Frsky™ (disposant de la télémétrie) utilisant un protocole bidirectionnel (D8).|cc2500-note|
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole Frsky supporte jusqu’à 8 canaux et n’autorise pas l’auto-appairage. Si l” ID fixe est positionné sur Néant , une ID spécifique à l’émetteur est utilisée à sa place. Il faut appairer chaque modèle manuellement avant la première utilisation.
Le protocole Frsky autorise également d’activer/désactiver la télémétrie. On accède à cette fonction et appuyant sur la boite de sélection du protocole quand Frsky est affiché.
Lorsque la télémétrie est activée, les valeurs envoyées par le récepteur sont RSSI (puissance d’émission) Volt1 et Volt2.
Des valeurs de télémétrie du Hub sont supportées en commun avec le protocole FrskyX sur les émetteurs sauf le 7e et le F7. Voir la section télémétrie Frsky ci dessous.
10.16. Protocole: *FrskyX¶
Le protocole FrskyX installe le protocole de la radio Frsky D16, en incluant le S.Port et le hub de télémétrie.
NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
This protocol supports up to 16 channels. Fixed ID binding is supported to link the transmitter with specific receivers. Supports receiver telemetry (RSSI, VOLT1) on all transmitters. Supports S.Port and hub telemetry sensors as well as GPS telemetry (except on memory-limited 7e and f-series) as described in the next section.
Les options suivantes sont disponibles pour ce protocole.
Freq-fine: Ajustement du décalage de fréquence. Intervalle -127 à 127. Ajuste les différences entre les modules CC2500. Généralement un décalage de 0 ou -41 est nécessaire, mais on devrait tester l’intervalle entier en cas de problème d’appairage ou de portée. Défaut 0. la valeur télémétrique LQI (qualité d’appairage) peut être utilisée comme guide pour cet ajustement fin de fréquence.
AD2GAIN: La valeur de télémétrie VOLT2(entrée AIN - Analog IN- sur le X4R) est multipliée par cette valeur divisée par 100. Cela permet l’ajustement du circuit à résistance diviseur de voltage externe. Le défaut est 100 (gain 1). l’échelle va de 1 à 2000 (gain de 0.01 à 20.00).
Sécurités:[Failsafe]: les options de sécurité Frsky sont toutes prises en charge. Si la sécurité du canal ( dans la configuration du mixage du canal) est activée, cette valeur est envoyée au récepteur toutes les 9 secondes. Le récepteur utilisera ces valeurs dans le mode sécurité sauf si l’option du protocole est fixée sur RX.
Format : Fixe le format pour correspondre au micrologiciel du récepteur. FCC ou EU. La version EU est compatible avec le micrologiciel Frsky LBT mais ne réalise pas réellement le tes LBT.
RSSIChan -Canal RSSI- Lorsque cette valeur est sur LastChan - dernier canal- la valeur RSSI reçue sera transmise sur le dernier canal de la radio, basé sur le nombre de canaux défini dans le modèle. La valeur du canal est la valeur RSSI reçue multipliée par 21.
S.Port Out: Quand autorisé, les paquets du S.port reçus sont aussi envoyé au port d’écolage et les le système vocal est désactivé.
Bind Mode: The bind mode will control which channels will be connected to the receiver PWM outputs and allow to enable or disable the receivers telemetry during bind.
Version: This will switch between FrSkyX V1.x.x and V2.1.x protocol version.
Pour les canaux dont la sécurité -failsafe- est réglée sur arrêt -off-, l’option de sécurité par défaut du protocole, « Maintien » -« Hold »- commande au récepteur de maintenir la dernière valeur reçue quand le récepteur entre en mode sécurité -failsafe-. L’option « NoPulse » fait que le récepteur n’envoie plus aucun signal sur les sorties PPM (des tests sur X8R ont montré que les valeurs SBUS allaient au minimum, mais le comportement du SBUS n’est pas spécifié par le protocole). Le réglage « RX » empêche Deviation d’envoyer des valeur de sécurité donc le récepteur utilisera les valeurs de sécurité qui y ont été enregistrées.
Lorsque la télémétrie du S.Port est reçue et que le PPMin n’est pas utilisé, les paquets de données sont envoyés par le port d’écolage. Le débit est de 57600 pour être compatibles avec les décodeurs de S.Port, mais le signal doit être inversé pour être connecté à un décodeur standard. Il peut être connecté directement à l’entrée d’un adaptateur FTDI 3.3 V.
10.17. Télémétrie étendue Frsky et FrskyX¶
La télémétrie étendue fait référence aux capteurs du hub et du S.Port Frsky. Ces capteurs sont pris en charge sur tous les émetteurs excepté le 7e. Ils sont disponibles sur les affichages des pages de test de la télémétrie et des pages principales.
Le S.port de télémétrie Frsky permet de connecter jusqu’à 16 capteurs du même type ( par ex voltage de batterie). Deviation prend en charge des capteurs multiples du même type mais une seule valeur de télémétrie est enregistrée. la valeur la plus récente de tous les capteurs du même type est rapportée.
Les valeurs de télémétrie sont réinitialisées par une pression longue sur le bouton Up pendant l’affichage de la page de télémétrie. Pour Frsky, l’altitude « au niveau du sol » est réinitialisée à zéro. La décharge de la batterie et le voltage de la cellule de batterie minimum sont aussi réinitialisés. L’altitude sol est sauvegardée dans le fichier du modèle pour la conserver en cas d’extinction de l’émetteur. La valeur est assez constante pendant une journée de vol en atmosphère stable.
Page de test de la télémétrie
Les tableaux suivant montrent la disposition de l’affichage de la page de test de la télémétrie.
| Devo10 | ||
|---|---|---|
| Divers | Bat | Eléments |
| Force signal | VOLT1 | ELEM1 |
| TEMP1 | VOLT2 | ELEM2 |
| TEMP2 | VOLT3 | ELEM3 |
| Tr/Min | MINELEM | ELEM4 |
| CARBURANT | TOTELEM | ELEM5 |
| ALTITUDE | VOLTA | ELEM6 |
| VARIO | COURANT | DECHARGE |
| LQI | LRSSI | |
| Devo7e | ||
|---|---|---|
| Divers | Bat | Signl |
| Force signal | VOLT1 | LQI |
| VOLT2 | LRSSI | |
L’altitude donnée est déterminée au dessus du niveau du sol. Le niveau du sol est fixé par la première valeur d’altitude reçue.
le LQI (Indicateur de qualité de liaison) et le LRSSI (RSSI local) montrent la qualité et la la force du signal de la télémétrie reçue du récepteur. Le LQI peut être utilisé comme un moyen de régler l’option d’ajustement fin de fréquence. Une valeur de LQI basse est préférable et des valeurs inférieures à 50 sont habituelles. L’unité de LRSSI est (approximativement) le DBm.
Valeurs dérivées MINELEM est la valeur la plus basse rapportée d’élément de batterie. TOTELEM est le total de tous les éléments de batterie. DECHARGE est la décharge totale de la batterie en milliampère/heure - Mah.
10.18. Protocole: *Skyartec¶
Le protocole Skyartec est utilisé pour contrôler les modèles et les récepteurs Skyartec™. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole Skyartec supporte jusqu’à 7 canaux et n’autorise pas l’auto-appairage. Si l” ID fixe est positionné sur Néant , une ID spécifique à l’émetteur est utilisée à sa place. Il faut appairer manuellement chaque modèle avant la première utilisation.
10.19. Protocole: *Futaba S-FHSS¶
Le protocole Futaba S-FHSS sert à contrôler les récepteurs et modèles Futaba™. Il est aussi utilisé par quelques modèles de XK innovations et possède des récepteurs compatibles de tierces parties. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole S-FHSS autorise jusqu’à 8 canaux et n’accepte que l’auto-appairage. Si l” ID fixe est positionné sur Néant , une ID spécifique à l’émetteur est utilisée à sa place. Il faut appairer manuellement chaque modèle avant la première utilisation.
L’agencement traditionnel des canaux Futaba est le suivant : Ailerons, Profondeur, Gaz, Dérive, Train, Pas, Aux1 et Aux2. Il est donc adapté au contrôle du pas collectif (CP) des hélicoptères.
La résolution du protocole est 1024 (10 bits) dont seule une part un peu plus petite est réellement utilisée (données par rétro-ingénierie utilisant un équipement tierce partie. La résolution temporelle est de 6.8ms. La télémétrie n’est pas supportée.
10.20. Protocole: *Corona¶
Le protocole Corona prend en charte les récepteurs Corona V1 et V2 et Flydream V3. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole accepte jusqu’à 8 canaux. L’ordre par défaut des canaux est AETR - Ailerons Profondeur Gaz Direction. Pas de télémétrie pour ce protocole.
Les options suivantes sont disponibles pour ce protocole.
Format: Sélection du protocole. Utiliser V1 et V2 pour les récepteurs Corona. Utiliser FDV3 pour les récepteurs Flydream V3.
Freq-fine: Ajustement du décalage de fréquence. Intervalle -127 à 127. Ajuste les différences entre les modules CC2500. Généralement un décalage de 0 ou -41 est nécessaire, mais on devrait tester l’intervalle entier en cas de problème d’appairage ou de portée. Défaut 0.
10.21. Protocole: *Hitec¶
Le protocole Hitec prend en charge les récepteurs Optima et Minima. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole accepte jusqu’à 9 canaux. L’ordre par défaut des canaux est AETR - Ailerons Profondeur Gaz Direction. La télémétrie est prise en charge selon la configuration Frsky. Les valeurs suivantes sont supportées : VOLT1, VOLT2, CURRENT, TEMP1, TEMP2, FUEL, RPM, LRSSI, LQI, et GPS (latitude, longitude, altitude, vitesse, direction). Le RSSI (force du signal du récepteur) n’est pas disponible pour ce protocole.
Les options suivantes sont disponibles pour ce protocole.
Format: Sélection du récepteur pour Optima ou Minima.
Freq-fine: Ajustement du décalage de fréquence. Intervalle -127 à 127. Ajuste les différences entre les modules CC2500. Généralement un décalage de 0 ou -41 est nécessaire, mais on devrait tester l’intervalle entier en cas de problème d’appairage ou de portée. Défaut 0.
10.22. Protocole: *V202¶
Le protocole V202 accepte les quadricoptères WLtoys V202. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole V202 supporte jusqu’à 12 canaux et n’autorise pas l’auto-appairage. Si l” ID fixe est positionné sur Néant , une ID spécifique à l’émetteur est utilisée à sa place. Il faut appairer manuellement chaque modèle avant la première utilisation.
Les 4 1ers canaux représentent les ailerons, la profondeur, les gaz et la dérive. Les canaux additionnels contrôlent les fonctions spéciales du quadricoptère :
- Le canal 5 contrôle la vitesse de clignotement
- Le canal 6 permet le mode “flip”.
- Le canal 7 prend des photos.
- Le canal 8 met en marche et arrête la vidéo.
- Le canal 9 met en marche et arrête le mode de contrôle d’orientation intelligent - [headless}
- Le canal 10 provoque la calibration de l’axe des x.
- Le canal 10 provoque la calibration de l’axe des y.
Si le format JXD-506 est choisi, les canaux 10-12 sont utilisés pour :
- Canal 10 : marche/arrêt.
- Canal 11 : Arrêt d’urgence.
- Canal 12 : Contrôle d’orientation de la suspension de camera.
De plus, les modèles compatibles avec ce format nécessitent que le manche des gaz soient centrés avant l’activation.
10.23. Protocole: *SLT¶
Le protocole SLT est utilisé pour contrôler les récepteurs TacticSLT/Anylink. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole SLT autorise jusqu’à 6 canaux et n’accepte que l’auto-appairage. On peut utiliser une ID fixe, mais cela n’empêche pas l’auto-appairage durant la mise sous tension.
10.24. Protocole: *HiSky¶
Le protocole HiSky est utilisé pour contrôler les modèles de la marque HiSky ainsi que les modèles WLtoys V922 et V955. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole HiSky supporte jusqu’à 7 canaux et n’autorise pas l’auto-appairage. Si l” ID fixe est positionné sur Néant , une ID spécifique à l’émetteur est utilisée à sa place. Il faut appairer manuellement chaque modèle avant la première utilisation.
10.25. Protocole: *YD717¶
Le protocole YD717 accepte les mini-quadricoptères YD717 et Skybotz UFO, et plusieurs modèles de Sky Walker, XinXun, Ni Hui et Syma à travers les options du protocole. Voir la feuile des modules pris en charge pour une liste complète. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole YD717 supporte 9 canaux et n’autorise que l’auto-appairage. Le protocole reste en mode appairage jusqu’à la réussite de celui-ci.
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive.
le canal cinq permet la fonction flip automatique s’il est plus grand que zéro. De plus pour effectuer des flips automatiques droite et gauche le canal des ailerons doit être à 87 ou plus grand. De la même manière pour le canal de profondeur et les flips avant et arrière. Quand le flip automatique est activé, bouger le cyclique dans une direction déclenche un flip dans cette direction. Le YD717 demande au moins quatre secondes entre chaque flip automatique.
Le canal six allume les lumières s’il est supérieur à zéro.
Le canal sept prend une photo quand il passe de négatif à positif.
Le canal huit démarre/arrête l’enregistrement vidéo sur chaque changement positif.
Le canal neuf est assigné à la dernière fonction possible avec ce protocole. Il peut contrôler le mode contrôle d’orientation intelligent [headless] sur les modèles disposant de cette fonction.
10.26. Protocole: *SymaX¶
Ce protocole est utilisé sur les modèles Syma : X5C-1, X11, X11C, X12, nouveau X4, et nouveau X6. Une variante supportant le X5C original et le X2 est incluse comme option du protocole. (le Syma X3, ancien X4, et ancien X6 sont pris en charge par l’option SymaX4 dans le protocole YD717). Voir la feuille des Modules pris en charge pour une liste complète. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the « plus » version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole SymaX supporte 9 canaux et n’autorise que l’auto-appairage.
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive.
Le canal cinq n’est pas utilisé.
Le canal six permet la fonction auto-flip quand il est plus grand que zéro.
Le canal sept prend une photo quand il passe de négatif à positif.
Le canal huit démarre/arrête l’enregistrement vidéo sur chaque changement positif.
Le canal huit active le mode contrôle d’orientation intelligent [headless] quand il est positif.
10.27. Protocole: *Hontai¶
Ce protocole est utilisé sur les modèles F801 et F803.
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the « plus » version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive. Les canaux supplémentaires contrôlent des fonctions spéciales.
- Le canal 5 n’est pas utilisé.
- Le canal 6 permet le mode “flip”.
- Le canal 7 prend une photo quand il passe de négatif à positif.
- Le canal 8 active/désactive l’enregistrement vidéo à chaque changement positif.
- Le canal 9 met en marche et arrête le mode de contrôle d’orientation intelligent - [headless}
- Le canal 10 active la fonction retour au départ.
- Le canal 11 initialise la calibration.
10.28. Protocole: *Bayang¶
Ce protocole est utilisé sur les BayangToys X6, X7, X8, X9, X16, Boldclash B03, JJRC/Eachine E011, H8, H9D v2, H10, Floureon H101, JJRC JJ850, JFH H601, and H606 (format standard).
Ce protocole est utilisé sur le BayangToys X16 avec maintien d’altitude (Type X16-AH ).
Ce protocole est utilisé sur IRDRONE Ghost X5 ( type IRDRONE).
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the « plus » version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive. Les canaux supplémentaires contrôlent des fonctions spéciales.
- Le canal 5 active les LEDs ou le vol inversé (Floureon H101)
- Le canal 6 permet le mode “flip”.
- Le canal 7 prend une photo à chaque changement positif.
- Le canal 8 met en marche/arrête l’enregistrement vidéo sur chaque changement positif.
- Le canal 9 met en marche et arrête le mode de contrôle d’orientation intelligent - [headless}
- Le canal 10 active la fonction retour au départ.
- Le canal 11 déclenche le décollage ou l’atterrissage.
- Le canal 12 active l’arrêt d’urgence.
- Channel 13 analog aux channel #1
- Channel 14 analog aux channel #2
NOTE: Channels 13 and 14 are only active when using NFE Silverware firmware (and some other Silverware forks). Two otherwise static bytes in the protocol overridden to add two “analog” (non-binary) auxiliary channels. The « Analog Aux » Bayang protocol option must be enabled on the TX and the Silverware firmware must have the Analog Aux feature enabled. Mismatches betwen TX and RX settings will prevent binding.
10.29. Protocolel: *FY326¶
Ce protocole est utilisé sur le FY326 à carte mère rouge.
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the « plus » version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive. Les canaux supplémentaires contrôlent des fonctions spéciales.
- Le canal 5 n’est pas utilisé.
- Le canal 6 permet le mode “flip”.
- Le canal 7 n’est pas utilisé.
- Le canal 8 n’est pas utilisé.
- Le canal 9 met en marche et arrête le mode de contrôle d’orientation intelligent - [headless}
- Le canal 10 active la fonction retour au départ.
- Le canal 11 initialise la calibration.
10.30. Protocole: *CFlie¶
Le protocole CFlie est utilisé sur le nano quadricoptère CrazyFlie. Il n’a été testé sur aucun autre modèle. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the « plus » version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole CFlie supporte jusqu’à 4 canaux et n’autorise pas l’auto-appairage. Si l” ID fixe est positionné sur Néant , une ID spécifique à l’émetteur est utilisée à sa place. Il faut appairer manuellement chaque modèle avant la première utilisation.
10.31. Protocole: *H377¶
Le protocole H377 est utilisé sur l’hélicoptère 6 canaux H377-6 de NiHui. Il n’a été testé sur aucun autre modèle. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the « plus » version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocoleH377 supporte jusqu’à 7 canaux et n’autorise pas l’auto-appairage. Si l” ID fixe est positionné sur Néant , une ID spécifique à l’émetteur est utilisée à sa place. Il faut appairer manuellement chaque modèle avant la première utilisation.
10.32. Protocole: *HM830¶
Le protocole HM830 est utilisé sur l’avion en papier plié HM830. Il n’a été testé sur aucun autre modèle. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the « plus » version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole HM830 supporte 5 canaux et n’autorise que l’auto-appairage. Le protocole reste en mode appairage jusqu’à la réussite de celui-ci.
10.33. Protocole: *KN¶
Le protocole KN est utilisé sur les hélicoptères WLToys V930, V931, V966, V977 et V988 (forma WLToys) ainsi que les Feilun FX067C, FX070C et FX071C (format Feilun). Il n’a été testé sur aucun autre modèle. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the « plus » version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole KN supporte jusqu’à 11 canaux et n’autorise pas l’auto-appairage. Si l” ID fixe est positionné sur Néant , une ID spécifique à l’émetteur est utilisée à sa place. Il faut appairer manuellement chaque modèle avant la première utilisation.
Les canaux 1-4 sont gaz, ailerons, profondeur et dérive. Le canal 5 active le double débattement inclus dans le modèle. Le canal 6 active la coupure moteur. Le canal 7 active le mode accro [idle-up] (WL Toys V931, V966 et V977 uniquement). Le canal 8 bascule entre 6G (par défaut) et la stabilisation 3G. Les canaux 9-11 sont les canaux de trim pour Gaz/Pas, profondeur et direction.
10.34. Protocole: *ESky150¶
Le protocole ESky150 supporte les plus petits modèles ESky à partir de 2014 (150, 300, 150X). l n’a été testé sur aucun autre modèle. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the « plus » version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole Esky150 supporte jusqu’à 7 canaux et n’autorise pas l’auto-appairage. Si l” ID fixe est positionné sur Néant , une ID spécifique à l’émetteur est utilisée à sa place. Il faut appairer manuellement chaque modèle avant la première utilisation.
Les canaux 1-4 sont gaz, ailerons,profondeur et dérive. Le canal 5 détermine le mode de vol ( commutateur à 1 bit à 2 états). Le canal 6 n’est utilisé dans aucun modèle testé. Le canal 7 est un commutateur à 2 bits (4 états).
Si vous avez un modèle à 4 canaux, il est important de configurer que votre modèle a 4 canaux, sinon le canal des gaz peut devenir incontrôlable.
10.35. Protocole: *Esky¶
A compléter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole Esky supporte jusqu’à 6 canaux et n’autorise pas l’auto-appairage. Si l” ID fixe est positionné sur Néant , une ID spécifique à l’émetteur est utilisée à sa place. Il faut appairer chaque modèle manuellement avant la première utilisation.
10.36. Protocole: *BlueFly¶
Le protocole BlueFly est utilisé sur le Blue-Fly HP100. Il n’a été testé sur aucun autre modèle. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the « plus » version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole BlueFly supporte jusqu’à 6 canaux et n’autorise pas l’auto-appairage. Si l” ID fixe est positionné sur Néant , une ID spécifique à l’émetteur est utilisée à sa place. Il faut appairer chaque modèle manuellement avant la première utilisation.
10.37. Protocole: *CX10¶
Le protocole CX10 accepte le quadricoptère Cheerson CX10. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole CX10 supporte 9 canaux et n’autorise que l’auto-appairage. Le protocole reste en mode appairage jusqu’à la réussite de celui-ci. Les quatre premiers canaux sont ailerons, profondeur, gaz et dérive .
Le canal 5 est le mode sauf pour le CX-10A pour lequel il active le mode à contrôle d’orientation intelligent [headless]
Le canal 6 est le mode Flip.
Le format DM007 utilise le canal 7 pour l’appareil photo, le canal 8 pour la camera vidéo et le canal 9 pour le mode à contrôle d’orientation intelligent [headless]
Le protocole a une option de format pour les quadricoptères Blue-A, Green, DM007, Q282, JC3015-1, JC3015-2, MK33041 et Q242.
10.38. Protocole: *CG023¶
Le protocole CG023 est utilisé sur les quadricoptères Eachine CG023 et 3D X4 . Il n’a été testé sur aucun autre modèle. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the « plus » version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole CG023 supporte 9 canaux et n’autorise que l’auto-appairage.
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive.
Le canal 5 contrôle les Leds.
Le canal 6 permet le mode “flip”.
Le canal 7 contrôle la prise de vue fixe.
Le canal 8 contrôle la caméra vidéo.
Le canal 9 contrôle le mode de contrôle d’orientation intelligent - [headless}
Le protocole a une option de format pour le quadricoptère YD829.
10.39. Protocole: *H8_3D¶
Le protocole H8_3Dest utilisé sur les quadricoptères Eachine H8 3D, JJRC H20 et H11D . Il n’a été testé sur aucun autre modèle. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the « plus » version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole H8_3D supporte 11 canaux et n’autorise que l’auto-appairage.
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive.
Le canal 5 contrôle les Leds.
Le canal 6 permet le mode “flip”.
Le canal 7 contrôle la prise de vue fixe.
Le canal 8 contrôle la caméra vidéo.
Le canal 9 contrôle le mode de contrôle d’orientation intelligent - [headless}
Le canal 10 contrôle le mode retour au départ - RTH - Return to home.
Le canal 11 contrôle le support de caméra sur le H11D et a 3 positions.
Mettre les deux manches en bas à gauche initialise la calibration des accéléromètres sur le H8 3D ou la calibration du de contrôle d’orientation intelligent - [headless} sur le H20.
Mettre les deux manches en bas à droite initialise la calibration des accéléromètres sur le H20 et le H11D.
10.40. Protocole: *MJXq¶
Le protocole MJXq supporte les quadricoptères MJX. Il posséde aussi des options de format pour les Weilihua WLH08, EAchine E010 et JJRC H26D / H26WH. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Le protocole MJXq supporte 12 canaux et n’autorise que l’auto-appairage.
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive.
Le canal 5 contrôle les LEDs ou active si le format H26WH est choisi.
Le canal 6 permet le mode “flip”.
Le canal 7 contrôle la prise de vue fixe.
Le canal 8 contrôle la caméra vidéo.
Le canal 9 contrôle le mode de contrôle d’orientation intelligent - [headless}
Le canal 10 contrôle le mode retour au départ - RTH - Return to home.
Le canal 11 contrôle le flip automatique (formats X600 & X800 ) ou le déplacement horizontal de la caméra.
Le canal 12 contrôle l’inclinaison verticale de la caméra.
10.41. Protocol: *Bugs3Mini¶
The Bugs3Mini protocol is used to control MJX Bugs3 Mini and Bugs 3H aircraft. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
To bind first choose the Bugs3Mini protocol and click Bind. Then apply power to the aircraft. The bind dialog will disappear if bind is successful.
Canaux utilisés pour contrôler les fonctions. Fixer une valeur de canal plus grande que zéro pour activer.
- L’armement est contrôlé par le canal 5.
- Les lumières sont contrôlées par le canal 6.
- Le Flip est contrôlé par le canal 7.
- La camera est contrôlée par le canal 8
- Video is controlled by Channel 9
- Les modes Angle et Acro sont contrôlés par le canal 10. (>0 pour Angle)
Telemetry is supported for RSSI and voltage alarm. It uses the Frsky telemetry display with signal strength reported in the RSSI field and battery voltage in VOLT1. The Bugs3 Mini receiver only reports good/warning/low voltage. This is translated to VOLT1 values of 8.40V for good, 7.10V for warning and 6.40V for low voltage.
10.42. Protocol: *E012¶
The E012 protocol is used to control the Eachine E012 quadcopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The E012 protocol supports 10 channels and only supports auto-binding.
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive.
- Le Flip est contrôlé par le canal 6.
- Le mode à contrôle d’orientation intelligent [Headless] est contrôlé par le canal 9.
- Le mode “Retour à la maison” [RTH] est contrôlé par le canal 10.
10.43. Protocol: *E015¶
The E015 protocol is used to control the Eachine E015 quad/car/boat. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The E015 protocol supports 10 channels and only supports auto-binding.
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive.
- L’armement est contrôlé par le canal 5.
- Led light is controlled by Channel 6
- Le Flip est contrôlé par le canal 7.
- Le mode à contrôle d’orientation intelligent [Headless] est contrôlé par le canal 9.
- Le mode “Retour à la maison” [RTH] est contrôlé par le canal 10.
10.44. Protocol: *NCC1701¶
The NCC1701 protocol is used to control the Air Hog Star Strek NCC-1701 quadcopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The NCC1701 protocol supports 5 channels and only supports auto binding.
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive.
- Warp is controlled by Channel 5
10.45. Protocol: *V911S¶
The V911S protocol is used to control the WL Toys V911-S helicopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The V911S protocol supports 5 channels. The receiver must be bound manually one-time using the ‘Bind’ button, after which it should stay bound.
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive.
- Calibration is controlled by Channel 5
10.46. Protocol: *GD00X¶
The GD00X protocol is used to control the C17 C-17 Transport and GD006 Diamond DA62 fixed wings. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The GD00X protocol supports 5 channels and only supports auto binding.
The first four channels are Aileron, Elevator, Throttle and Rudder. Only throttle and aileron channels are used by the model.
- Les lumières sont contrôlées par le canal 5.
10.47. Protocol: *LOLI¶
The LOLI protocol is used to control popular DIY nRF24L01 receivers. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The LOLI protocol supports 8 channels. The receiver must be bound manually one-time using the ‘Bind’ button, after which it should stay bound.
Receiver output modes are configurable via protocol options.
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive.
Failsafe settings are supported.
La télémétrie est prise en charge.
10.48. Protocol: *E016H¶
The E016H protocol is used to control the Eachine E016H quadcopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The E016H protocol supports 8 channels and only supports auto binding.
Les quatre premiers canaux sont : Ailerons, profondeur, gaz et dérive.
- Flips are controlled by Channel 5
- Headless mode is controlled by Channel 6
- RTH mode (One Key Return) is controlled by Channel 7
- Emergency stop is controlled by Channel 8
10.49. Protocole : PPM¶
Le protocole PPM est utilisé pour envoyer une modulation PPM sur le port d’écolage. Il arrête la transmission radio. Il est utile pour connecter les simulateurs ou d’autres radios qui se branchent sur le port d’écolage. L” ID fixe est sans effet et il n’y a pas d’appairage avec ce protocole.
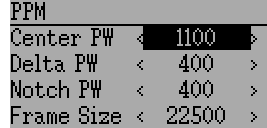
Options configurables sur la pagePPM :
- Imp Neutre : Définit la durée (en µsec) de l’impulsion que l’émetteur envoie pour représenter la position du servo au neutre. Si ce nombre ne correspond pas à l’émetteur maître, les servos ne seront pas centrés.
- Delta Imp: Définit la largeur de l’impulsion (mesurée du centre) envoyée par l’émetteur pour fixer le déplacement maximum du servo. Si cette valeur est incorrecte, les servos n’auront pas leur déplacement maximum (ou auront un déplacement trop important).
- Imp Fin : définit le délai entre les canaux.
- Larg Signal : Définit la durée totale pour transmettre tous les canaux.
- Polarity: Defines the polarity of the signal, Normal is active low.
Déviation ne détecte pas automatiquement si un cordon d’écolage est branché sur l’émetteur. Pour utiliser Deviation avec un simulateur (comme Phoenix), creer un nouveau modèle, lui attribuer un nom approprié et choisir le protocole PPM. Utiliser le bouton appairer ou redémarrer l’émetteur pour activer PPM.
10.50. Protocole: USBHID¶
Le protocole USBHID transforme l’émetteur en joystick USB. Connecter l’émetteur à un PC par un cordon USB permettra à l’émetteur d’être détecté comme joystick par l’ordinateur. On peut utiliser ceci pour contrôler un simulateur qui autorise l’entrée par joystilck. Une calibration initiale peut être nécessaire et et réalisée par le panneau ce contrôle de votre système d’exploitation.
10.51. Protocoel: SBUS¶
Le protocole SBUS envoie des données série sur la sortie d’écolage de l’émetteur (raccord jack) L’anneau de l’entrée d’écolage est la terre. Sur l’émetteur T8SG PLUS les données série sont présentes sur la broche supérieure de la baie pour module JR. Les données série ne sont pas inversées donc un adaptateur peut être nécessaire pour certains équipement SBUS. Un maximum de 16 canaux peut être pris en charge. Le débit des données est de 100kbps. Le format est 8 bits, parité paire et 2 bits de stop.
10.52. Protocole: CRSF (Crossfire)¶
Le protocole SBUS envoie des données série sur la sortie d’écolage de l’émetteur (raccord jack) L’anneau de l’entrée d’écolage est la terre. Sur l’émetteur T8SG PLUS les données série sont présentes sur la broche supérieure de la baie pour module JR. Pour permettre la télémétrie l’entrée série doit être reliée à la sortie série. pour le port d’écolage, relier la pointe au 1er anneau. Dans la baie de module T8SG, relier les broches supérieure et inférieure ensemble. Jusqu’à 16 canaux sont pris en charge.
Les opérations de configuration et d’appairage CRSF ne sont pas encore prises en charge. Utilisez un PC pour appairer le module Crossfire et le récepteur avant de l’utiliser avec Deviation.
La Télémétrie n’est pas prise en charge par les émetteurs à mémoire limitée (7e, F4, F12).
Page de test de la télémétrie
Les tableaux suivant montrent la disposition de l’affichage de la page de test de la télémétrie.
| Devo10 | ||
|---|---|---|
| RX -Récepteur- | TX -Emetteur- | Bat |
| RxRSSI | TxRSSI | VBATT |
| RSSI2 | TxPOWER | COURANT |
| RxSNR | TxSNR | CAPACITE |
| RxQUAL | TxQUAL | FMODE |
| TANGAGE | ROULIS | LACET |
| RFMODE | ||
10.53. Protocol: PXX¶
The PXX protocol is an Frsky serial interface to their transmitter modules. Primarily useful for R9M and XJT modules in the JR bay of the T8SG Plus, but protocol is available on the serial port of other transmitters.
Up to 16 channels are supported. Telemetry (S.Port) is supported in the Frsky format for most transmitters. Due to memory constraints telemetry is not available in modular builds. Range check operation is supported. Module power setting is displayed as FCC/EU (e.g. 100/25mW).
Fixed ID is supported to link the transmitter with specific receivers. The Fixed ID corresponds to the receiver number in OpenTX to make sharing easier. Values 0 to 63 are valid. Fixed IDs above 63 are truncated to the valid range.
Les options suivantes sont disponibles pour ce protocole.
Failsafe: If the channel failsafe (in mixer channel config) is set this value is sent to the receiver every 9 seconds. The receiver will use these values in failsafe mode unless the protocol option is set to RX. For channels with failsafe set to off, the default Failsafe protocol option « Hold » commands the receiver to hold the last received channel values when the receiver enters failsafe mode. The « NoPulse » setting causes the receiver to not send any signal on PPM outputs (Testing on X8R showed SBUS values went to minimum, but SBUS behavior is not specified by the protocol). The « RX » setting prevents Deviation from sending failsafe settings so the receiver will use whatever failsafe values have been stored in the receiver.
Country: Set the country to match the firmware in the receiver. Options are US, JP, EU.
Rx PWM out: Choose whether PWM outputs of receiver are channels 1-8 or 9-16.
Rx Telem: Turn receiver telemetry on or off.
For transmitters without JR module the PXX signal is available on the serial port output. This is normally the trainer jack except for the Devo12. Use a stereo plug. Tip will be the PXX output, and ring is the s.port input. Sleeve is ground.
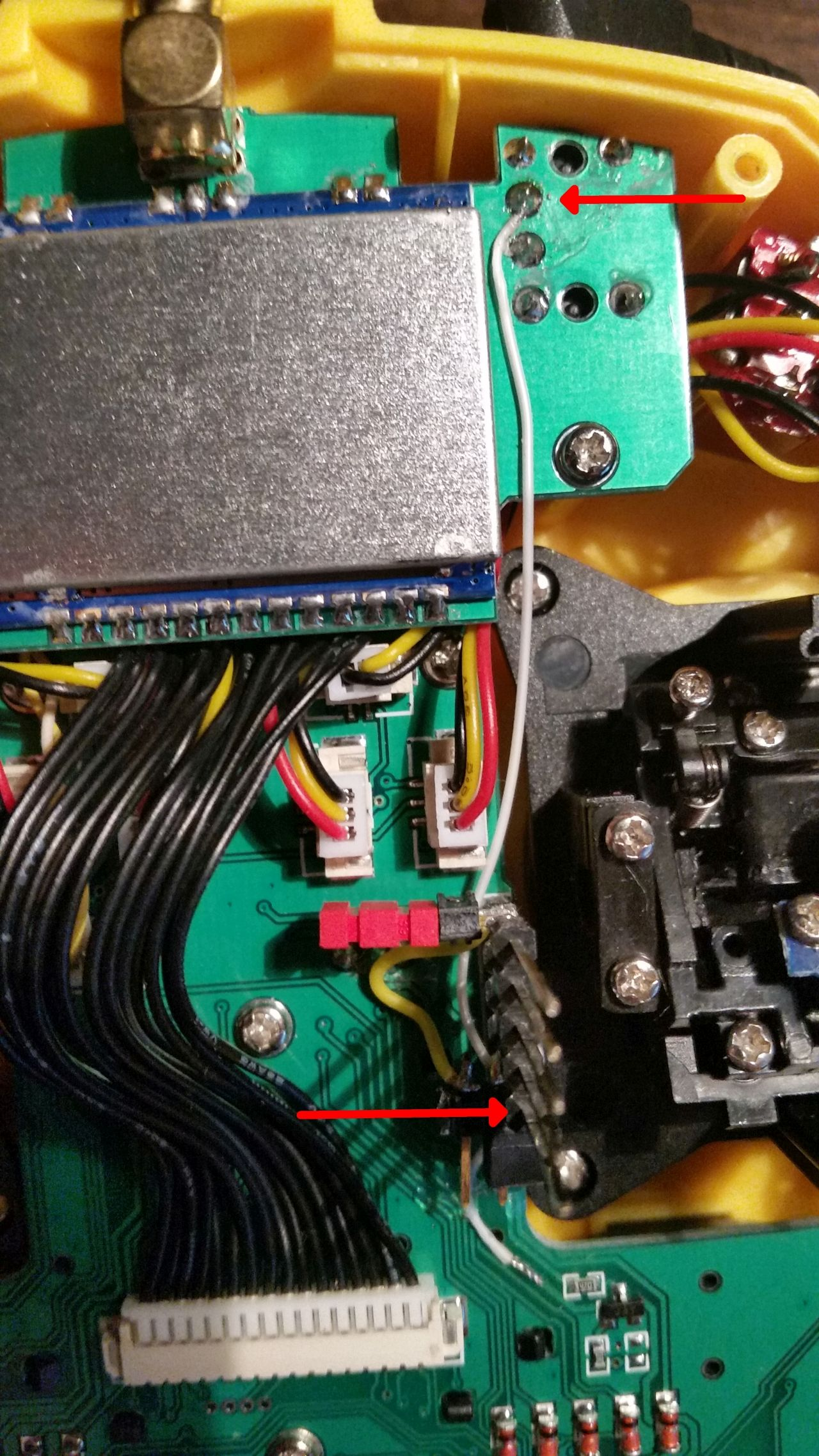
The T8SG V2 Plus requires a hardware modification to receive telemetry from a module in the JR bay. The trainer port ring must be connected to the bottom JR pin (see picture).