10. Sujets avancés¶
10.1. Mise en place d’un écolage¶
Deviation peut être utilisé pour faire fonctionner un émetteur soit en instructeur (maitre) ou en élève (esclave) dans une configuration d’écolage. Dans ce mode l’instructeur et l’élève relient leur émetteur respectifs par un cable branché sur le port DSC. L’émetteur de l’instructeur communiquera effectivement avec le modèle, mais l’instructeur peut utiliser un interrupteur pour donner à l’élève le contrôle du modèle. Quand l’interrupteur est activé, l’émetteur de l’élève envoie les information d’entrée (manches) par le câble à l’émetteur de l’instructeur et ces entrées remplacent celles de l’instructeur.
Deviation peut être configuré pour fonctionner avec virtuellement tous les émetteurs qui supportent soit le mode maitre soit le mode élève. Adapter Deviation à une radio de marque différente requiert de connaitre les paramètres PPM de l’émetteur appairé et de configurer correctement le « Centre PW » et le « Delta PW » et également de savoir combien de canaux sont transmis et leur ordre. Le meilleur endroit pour trouver ces renseignements est le forum de www.deviationtx.com
10.1.1. Mode Maitre¶
Le mode maitre est configuré en sélectionnant soit “Canal” soit “Stick” dans la boite d’entrée “PPM in” dans la page “Config Modèle”. En pressant sur “Canal” ou “Stick” on affichera les pages “Trainer Cfg” correspondantes. Les 2 modes se comportent de manière légèrement différentes
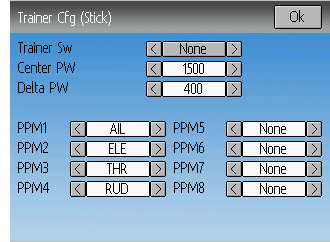
Stick: en mode Stick, chaque canal d’entrée est appliqué à un manche de l’émetteur maitre. Dans ce mode, le mouvement du manche de l’élève aura le même effet que si l’instructeur avait actionné le sien. En général quand on utilise ce mode l’émetteur de l’élève transmettra directement la position du manche (sans mixage) et l’émetteur de l’instructeur fera tous les mixages nécessaires.
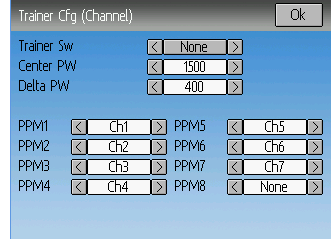
Canaux: En mode Canaux, chaque canal d’entrée est appliqué à un canal de sortie sur l’émetteur de l’instructeur. Dans ce mode l’émetteur de l’élève devrait faire tous les mixages nécessaires au contrôle du modèle. Il faudra prendre soin de s’assurer que les émetteurs de l’instructeur et de l’élève sont configurés identiquement, autrement le modèle pourrait ne pas réagir correctement en passant le contrôle entre l’instructeur et l’élève.
Options configurables sur les deux pages de configuration de double commande “Trainer Cfg”
- Imp Neutre: définit la durée (en µsec) de l’impulsion que l’émetteur de l’élève transmet pour représenter la position du centre du servo. Si ce nombre ne correspond pas à l’émetteur de l’élève, les servos ne seront pas centrés.
- Delta Imp: définit la largeur de l’impulsion (mesurée à partir du centre) émise par l’émetteur de l’élève pour définir le débattement maximum du servo. Si cette valeur est incorrecte, les servos ne pourront aller au débattement maximum (ou dépasseront ce débattement)
- Trainer Sw:Définit l’interrupteur qui permet à l’élève de prendre le contrôle du modèle.
- PPM1…PPM8: Définit la correspondance (soit canal soit entrée) entre l’émetteur de l’élève et celui de l’instructeur.
10.1.2. Mode esclave¶
Le mode esclave est configuré en choisissant “PPM” comme protocole dans la section ref:Config Modèle. En pressant “ENT” dans la boite de texte, on accède aux options de sortie.Voir la section protocole ppm pour effectuer la configuration. Notez que déviation émettra les données des canaux de sortie par le port PPM. Pour utiliser un émetteur élève en Deviation avec un Maitre en Deviation configuré dans le mode “Stick” (voir ci-dessus), il ne devrait y avoir aucun mixage dans l’émetteur esclave.
10.2. Installation d’un FPV ou d’autres entrées externes¶
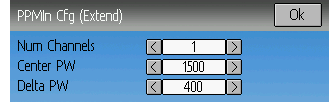
Déviation peut utiliser les signaux d’entrée PPM d’une source externe (comme un système FPV). Pour configurer ce mode, mettre le PPM en mode “Extend” dans la section Config Modèle.
Une fois “Extend” sélectionné, presser “ENT” dans la boite de texte pour accéder à la configuration des entrées additionnelles
Options de Configuration:
- Imp Neutre:Définit la largeur d’impulsion pour une entrée centrée (en µsec).
- Delta Imp: Définit la différence en largeur d’impulsion (à partir de la valeur centrale) pour atteindre le débattement min/max du servo.
- Num Channels: Définit le nombre de canaux entrants (en général pas plus de 8 peuvent être supportés).
10.3. Utilisation d’un trim comme interrupteur virtuel.¶
Déviation peut créer des interrupteurs virtuels en complément des interrupteurs mécaniques de l’émetteur. Cette possibilité est uniquement disponible quand le mode expert est utilisé. Il y a 3 types d’interrupteurs disponibles :
- Momentary: (Momentané)L’interrupteur sera actif tant que le bouton de trim sera maintenu.
- Toggle: (Basculant) l’interrupteur basculera de ouvert à fermé ou de fermé à ouvert à chaque pression sur le bouton de trim.
- On/Off: Le bouton Trim+ ouvrira l’interrupteur et le bouton Trim- le fermera.
- 3 Pos: L’interrupteur sera actif dans une direction aussi longtemps que Trim+ sera pressé et dans l’autre direction aussi longtemps que Trim- sera maintenu. Il retournera au centre lorsqu’il est relâché.
Pour mettre en place un interrupteur virtuel, commencer par sélectionner le Trim en entrant dans la page Trims. Voir trims-et-entrées-virtuelles”.
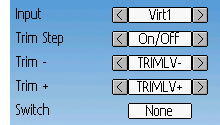
Enfin, définir le champ “Trim Step” comme “Momentary”, “Toggle”, “On/Off” ou “3 Pos”. Pour ce faire presser la flèche gauche de la “Trim Step” jusqu’à ce que la valeur affichée soit inférieure à 0.1 seconde. Sélectionner ensuite l’entrée “Input” à convertir comme interrupteur (nous utiliserons “Virt1”).
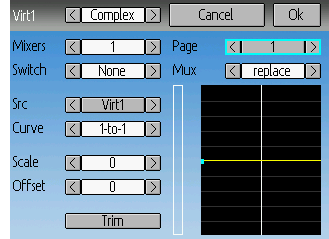
Puis aller dans la page “Mixer” et entrer la configuration pour le canal virtuel choisi (Virt1 dans notre exemple).
Sélectionner un type de mixer “Complexe”, entrer comme “Source” le canal virtuel (“Virt1”), choisir la courbe “1-à-1” (NE PAS choisir “Fixe”), fixer l’échelle à “0” et enfin sélectioner “Trim”.
Vous pouvez désormais utiliser le canal virtuel (“Virt1”) comme n’importe quel autre interrupteur. Quand cet interrupteur virtuel est actif, la valeur de son canal sera +100 et dans le cas contraire -100. Dans le cas d’un “3 Pos”, la valeur sera de -100 dans une direction, +100 dans l’autre direction et enfin 0 pour sa position médiane.
Note: Si vous utilisez le canal virtuel comme une “Source” (contrairement à un “interrupteur »), assurez vous que “Trim” est désactivez pour ce mixer, autrement le trim sera appliqué deux fois.
10.4. Mixage du plateau cyclique¶
Le plateau cyclique est utilisé pour contrôler le vol sur un hélicoptère RC. Le plateau cyclique contrôle le plan de rotation du rotor principal et le pas des pales. Le plateau cyclique est normalement relié à 3 servos nommés profondeur, aileron et pas collectif mais en raison de sa conception il n’y a pas une correspondance 1 à 1 entre le mouvement des manches et le mouvement des servos. Un mixage est nécessaire entre les manches des gaz, des ailerons et de la profondeur et les servos du plateau cyclique. Ce mixage est appelé mixage pas cyclique pas collectif (cyclic Collective Pitch Mixing (CCMP)).
Traditionnellement, les hélicoptères RC ont utilisé une Barre de Bell au dessus attachée au dessus ou au dessous du rotor principal pour maintenir la stabilité. Dans cette configuration, l’émetteur fera normalement tous les mixages et commandera directement chacun des 3 servos. Cette configuration est appelée CCPM manuel (mCCPM). Autrement un mixer électronique peut être inclus dans l’hélicoptère soit dans le récepteur soit entre le récepteur et les servos pour effectuer les mixages nécessaires. Cette configuration est appelée CCPM électronique (eCCPM) et dans ce cas l’émetteur transmet directement les entrées des ailerons de la profondeur et du pas collectif. et le mixer électronique convertit les signaux en mouvements correctes des servos du plateau cyclique.
Récemment les hélicoptères sans barre de Bell (Flybarless - FBL) sont devenus plus communs, spécialement dans la catégorie micro. Ces hélicoptères utilisent un système eCCPM avec un gyroscope électronique pour ajuster en permanence le plateau cyclique pour maintenir la stabilité sans besoin d’une barre de Bell. Cette configuration tend à être moins chère à produire, et elle permet une meilleure stabilité et un contrôle plus précis.
Deviation fournit le contrôle pour plusieurs configurations de plateaux cycliques. Ils comprennent : 120°, 120° Alternatif , 140°, 90°, et néant. Chaque configuration est décrite ci dessous.
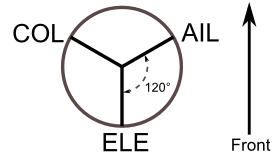
120 (3 Servos): Les servos sont placés autour du plateau cyclique à 120° d’intervalle. L’entrée Aileron incline le plateau à droite et à gauche avec les servos Aileron et Pas ; l’entrée profondeur incline le plateau en arrière et en avant grâce aux trois servos ; l’entrée Pas élève ou abaisse le plateau par les trois servos. Le travail simultané des servos accroit considérablement le couple disponible ainsi que la précision et le centrage.
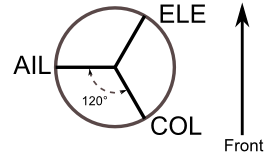
120X (3 Servos): Identique à la configuration ci dessus excepté que les servos sont décalés de 150°. Avec l’entrée Aileron, les trois servos inclinent le plateau à droite et à gauche ; avec l’entrée Profondeur, les servos Profondeur et pas inclinent le plateau en avant et en arrière ; avec l’entrée pas les trois servos élèvent ou abaissent le plateau.
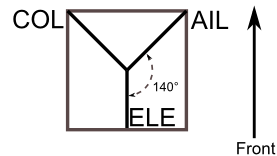
140 (3 Servos): Les fonctions des servos des plateaux cycliques à 140° sont presque les mêmes que celles des plateaux à 120°. Cependant l’agencement des servos est différente pour la profondeur. Un plateau à 140 ° permet un fonctionnement plus lissé de l’ensemble des servos et un taux de pas cyclique égal autour de l’axe. Avec une configuration à 120° le pas cyclique droite/gauche est légèrement plus rapide que le pas cyclique avant/arrière.
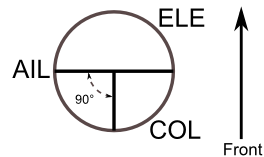
90 (3 Servo): Avec l’entrée Aileron, les servos d’aileron et de pas inclinent le plateau à droite et à gauche; avec l’entrée Profondeur les servos inclinent le plateau d’avant en arrière; avec l’entrée Pas, les trois servos elèvent ou abaissent le plateau. C’est la configuration la plus commune pour les hélicoptères électroniques.
Néant: C’est un cas spécial où tous les mixages sont faits dans l’hélicoptère qui utilise un système de contrôle de vol gyroscopique. Référez vous aux instructions du constructeur pour configurer les mixages.
Note : Des hélicoptères sont du genre 120 ou 140 mais tournés de 180 degrés. Dans ces cas, vous utiliserez les modèles de plateau considérés, mais vous pourrez avoir besoin d’inverser certains canaux.
10.5. Modification des sons.¶
Vous pouvez éditer les sons émis par votre Devo. Pour cela il faut démarrer l’émetteur en mode USB et éditer le fichier “sound.ini” dans le dossier “media”.
Les sections et ce qui provoque l’émission du son sont :
- startup : Mise sous tension.
- shutdown : Mise hors tension.
- volume: Régler le volume de l’émetteur.
- timer_warning : La durée du chrono va se terminer.
- alarm# : La durée du chrono (1 à 4) est expirée.
- batt_alarm : Avertissement batterie déchargée.
- done_binding : Liaison terminée.
- key_pressing : Lors de la pression d’un bouton.
- saving : Lors de la sauvegarde d’un fichier de modèle.
- max_len : Quand la chaine entrée au clavier est trop longue.
- telem_alarm# : Une alarme de télémétrie (1 à 6) a été déclenchée.
Dans chaque section vous pouvez ajuster le “volume” de 0 (muet) à 100 (max). Le reste des entrées sont des noms de notes et la valeur représente la durée en millisecondes pendant laquelle elles sont jouées. Il y a une limite de 100 notes pour chaque son.
Les noms des notes de musique s’écrivent au format “xx”. Notez que la valeur “xx” existe et sera un silence (aucune note jouée). Vous pouvez sélectionner une note de musique entre “a” et “g” (notation anglaise qui correspond à l’intervalle “la-sol” de la notation française), éventuellement diésée en ajoutant un “x” pour les notes “a” (La), “c” (Do), “d” (Ré), “f” (Fa) et “g” (Sol). Enfin vous pouvez sélectionner l’octave avec un chiffre de “0” à “4”. Les sons vont donc de “c0” (qui correspond au Do « du milieu » sur un piano, celui à 262Hz) à “b4”. Si besoin “a”, “ax” et “b” joueront les trois notes en dessous du Do milieu.