
- Posts: 1971
Eachine or JJRC H8 mini ?
- hexfet
-
- Offline
Less
More
22 Jul 2015 03:47 #35780
by hexfet
Replied by hexfet on topic Eachine or JJRC H8 mini ?
I'll point you to mwm's tutorial . Best to start a new topic for further discussion. As far as I know you do need a bitbucket account.greenfly wrote: I've got my build environment setup in Windows with TortoiseHG. I can clone a repo (like the main Deviation trunk) and build successfully, so I think I have everything in place. Can you describe how to make a combined build?
- Do I need to have a bitbucket account in order to merge branches together and compile a custom build?
- Can you roughly describe the process of
--> Cloning the main trunk
--> Merging in the protocol from branch X
--> Merging in a second protocol from branch Y
(Or let me know if I should start a new topic on this)
Thanks
- Richard96816
-
- Offline
Less
More
- Posts: 208
22 Jul 2015 08:13 #35784
by Richard96816
Replied by Richard96816 on topic Eachine or JJRC H8 mini ?
Bravo!!
You have tamed the beast! The H8 mini is now wonderfully flyable. The yaw needs limits, but is surprisingly flyable raw. The wild, drifting throttle has been tamed, with all that wonderful punch still there. Pitch and roll are plentiful and smooth. Simply amazing!
It's hard to believe it's so flyable with that insane, buzz-saw yaw lurking at the end of the stick.
Time to order more minis.
Thank you!
You have tamed the beast! The H8 mini is now wonderfully flyable. The yaw needs limits, but is surprisingly flyable raw. The wild, drifting throttle has been tamed, with all that wonderful punch still there. Pitch and roll are plentiful and smooth. Simply amazing!
It's hard to believe it's so flyable with that insane, buzz-saw yaw lurking at the end of the stick.
Time to order more minis.
Thank you!
- dc59
-
- Offline
Less
More
- Posts: 799
22 Jul 2015 12:49 #35792
by dc59
Replied by dc59 on topic Eachine or JJRC H8 mini ?
I tried few lipos on b9f6efa test build, it's perect for my H8 mini, every function works fine,
set DR to 125% it's same as stock TX high rate , can't find any difference!
I also tried difference fixed IDs , it's all works!
Excellent!
Thanks Hexfet.
set DR to 125% it's same as stock TX high rate , can't find any difference!
I also tried difference fixed IDs , it's all works!
Excellent!
Thanks Hexfet.
- hexfet
-
- Offline
Less
More
- Posts: 1971
22 Jul 2015 13:12 #35793
by hexfet
Replied by hexfet on topic Eachine or JJRC H8 mini ?
Good to hear it's all working ")
Would you please try the Dyntrim protocol option? Click on the protocol name to access the options, then set it on. If it works well the quad will be more responsive, but be careful because we're just trying it out so it may cause unexpected behavior (such as reversing directions at the end of stick travel).
Would you please try the Dyntrim protocol option? Click on the protocol name to access the options, then set it on. If it works well the quad will be more responsive, but be careful because we're just trying it out so it may cause unexpected behavior (such as reversing directions at the end of stick travel).
- vasiliy_gr
-
- Offline
Less
More
- Posts: 67
22 Jul 2015 14:01 #35795
by vasiliy_gr
Replied by vasiliy_gr on topic Eachine or JJRC H8 mini ?
Checked DynTrim on all the three quads. No glitches at all. Considerable improve on pitches. But why not on rudder?.. Really for H8mini it makes no sense, but X9 a little bit slow on yaw rate.
- dc59
-
- Offline
Less
More
- Posts: 799
22 Jul 2015 14:10 #35796
by dc59
I tried one lipo with dyntrim on, there is nothing different, all funtion works well, I think it's a good news right?
But I would like to know what is dyntrim ?
Replied by dc59 on topic Eachine or JJRC H8 mini ?
hexfet wrote: Good to hear it's all working
Would you please try the Dyntrim protocol option? Click on the protocol name to access the options, then set it on. If it works well the quad will be more responsive, but be careful because we're just trying it out so it may cause unexpected behavior (such as reversing directions at the end of stick travel).
I tried one lipo with dyntrim on, there is nothing different, all funtion works well, I think it's a good news right?
But I would like to know what is dyntrim ?
- hexfet
-
- Offline
Less
More
- Posts: 1971
22 Jul 2015 15:23 #35798
by hexfet
Replied by hexfet on topic Eachine or JJRC H8 mini ?
Dynamic trim uses the trim packet data to extend the control range. For example, with dyntrim on, when you move the stick to full deflection, the data sent to the quad is the same as if on the stock tx you also set the trim full in the same direction as the stick movement. The trim value is scaled to match the channel data throughout the stick movement. The actual trim function in deviation is not affected because it acts on the channel data.
Some quads tolerate this and some don't. It was originally done for the yd717 with good results, but in a couple of the recent protocols sending full channel value + full trim caused erratic behavior. It also doesn't surprise me that it may affect pitch/roll but not yaw. It just depends on how the quad handles the trim data.
Based on the feedback sounds like it's safe to keep the dynamic trim without having the protocol option.
Some quads tolerate this and some don't. It was originally done for the yd717 with good results, but in a couple of the recent protocols sending full channel value + full trim caused erratic behavior. It also doesn't surprise me that it may affect pitch/roll but not yaw. It just depends on how the quad handles the trim data.
Based on the feedback sounds like it's safe to keep the dynamic trim without having the protocol option.
- hexfet
-
- Offline
Less
More
- Posts: 1971
22 Jul 2015 15:25 #35799
by hexfet
Replied by hexfet on topic Eachine or JJRC H8 mini ?
The dyntrim is implemented in the code on the yaw channel, but the quad may not treat it the same as roll/pitch trim. Does the X9 stock tx have a yaw trim control? Also check that yaw is not slower with dyntrim on, which might happen if I got the direction wrong in the scaling.vasiliy_gr wrote: Checked DynTrim on all the three quads. No glitches at all. Considerable improve on pitches. But why not on rudder?.. Really for H8mini it makes no sense, but X9 a little bit slow on yaw rate.
- vasiliy_gr
-
- Offline
Less
More
- Posts: 67
22 Jul 2015 16:35 #35801
by vasiliy_gr
Replied by vasiliy_gr on topic Eachine or JJRC H8 mini ?
I thought that there is no DynTrim addition on rudder as I do not see the last version code in repo, but in previous code there were comments on Dyntrim addition only on ail/ele channels, but not rudder.
As for X9's stock TX - it does have yaw trim. Checked it right now. But really it influence rotation not very much. More than that - rotations in the direction of trim fully left/right has the same speed as rotations with zero trim on stock TX. And they both equal to rotations on devo with/without dyntrim. But rotation speed on stock TX becomes lower if the direction is opposite to full trim. I mean 6 and 5 rotations per 10 seconds correspondingly (plus/minus 0.5 rotations).
And one more interesting observation. If I set rudder trim fully left/right on stock TX, turn off TX and X9, turn on X9 and TX (stock or devo) - X9 is drifting on yaw in previous trim direction (but on stock TX after restart trim value is zero also on devo). And this drift can be cleared by gyro reset.
As for X9's stock TX - it does have yaw trim. Checked it right now. But really it influence rotation not very much. More than that - rotations in the direction of trim fully left/right has the same speed as rotations with zero trim on stock TX. And they both equal to rotations on devo with/without dyntrim. But rotation speed on stock TX becomes lower if the direction is opposite to full trim. I mean 6 and 5 rotations per 10 seconds correspondingly (plus/minus 0.5 rotations).
And one more interesting observation. If I set rudder trim fully left/right on stock TX, turn off TX and X9, turn on X9 and TX (stock or devo) - X9 is drifting on yaw in previous trim direction (but on stock TX after restart trim value is zero also on devo). And this drift can be cleared by gyro reset.
- Richard96816
-
- Offline
Less
More
- Posts: 208
22 Jul 2015 22:15 #35814
by Richard96816
Replied by Richard96816 on topic Eachine or JJRC H8 mini ?
The H8 mini definitely has no need for Dyntrim on rudder. Looking forward to checking out the other controls this evening. Sounds promising.
- phantom8
-
- Offline
Less
More
- Posts: 109
23 Jul 2015 02:54 #35828
by phantom8
I agreed, the H8 mini is already way too aggressive in expert mode. Adding Dyntrim as a default and without the ability to turn it off may not be a good idea. I'll suggest to keep the Dyntrim as a protocol option.
Replied by phantom8 on topic Eachine or JJRC H8 mini ?
Richard96816 wrote: The H8 mini definitely has no need for Dyntrim on rudder. Looking forward to checking out the other controls this evening. Sounds promising.
I agreed, the H8 mini is already way too aggressive in expert mode. Adding Dyntrim as a default and without the ability to turn it off may not be a good idea. I'll suggest to keep the Dyntrim as a protocol option.
- RoGuE_StreaK
-
- Offline
Less
More
- Posts: 486
23 Jul 2015 03:46 #35829
by RoGuE_StreaK
Replied by RoGuE_StreaK on topic Eachine or JJRC H8 mini ?
Pardon my ignorance, haven't been keeping up with the latest quads, from what I've found this is an nrf24L01 system correct? If so, is the module used in the stock TX that comes with it usable in a Devo? Found one thing that indicated a range of about 80m, which to me would be fine for any nrf24L01 stuff I'd get; seems to typically be tiny-scale, so kept well within say a 50m radius otherwise you can't see it 
Seems like it may be a good cheap option to get BOTH a decent(ish) hackable mini-quad AND a module for deviating...
Seems like it may be a good cheap option to get BOTH a decent(ish) hackable mini-quad AND a module for deviating...
- Richard96816
-
- Offline
Less
More
- Posts: 208
23 Jul 2015 04:19 #35830
by Richard96816
Replied by Richard96816 on topic Eachine or JJRC H8 mini ?
Just got home from work. Tried out the Dyntrim on the H8 mini. Can't tell if it has any effect on yaw, since that's plain crazy already.
But the increased roll and pitch turn the little beast into a MONSTER!
Have yet to take her outside since Deviation. I hope there's enough wind!
Nice job!
But the increased roll and pitch turn the little beast into a MONSTER!
Have yet to take her outside since Deviation. I hope there's enough wind!
Nice job!
- Phillycopter8
-
- Offline
Less
More
- Posts: 3
23 Jul 2015 08:15 - 23 Jul 2015 08:51 #35833
by Phillycopter8
Replied by Phillycopter8 on topic Eachine or JJRC H8 mini ?
Hi I'm still new to deviationtx, would a complete novice be able to put this new protocol on a devo 7e transmitter? Am I better off waiting for a new nightly build to install because I have now idea what to do with the links in this thread? Cheers guys, looking forward to flying the h8 mini with the devo 7e!
EDIT: found the right file in the tests builds. WOW! With dyn trims selected pitch and roll is amazing! Works with both the x9 and h8mini! Now all my quads are controlled with the one transmitter! Thanks for awesome work guys! Much appreciated
EDIT: found the right file in the tests builds. WOW! With dyn trims selected pitch and roll is amazing! Works with both the x9 and h8mini! Now all my quads are controlled with the one transmitter! Thanks for awesome work guys! Much appreciated
Last edit: 23 Jul 2015 08:51 by Phillycopter8.
- dc59
-
- Offline
Less
More
- Posts: 799
23 Jul 2015 08:48 - 23 Jul 2015 08:49 #35834
by dc59
Yes, you can download newest test build HERE
or follow these steps to download it.
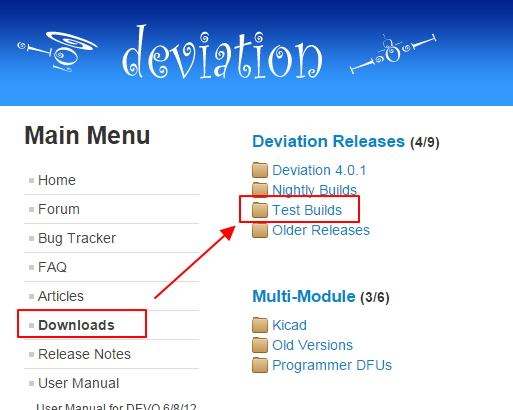

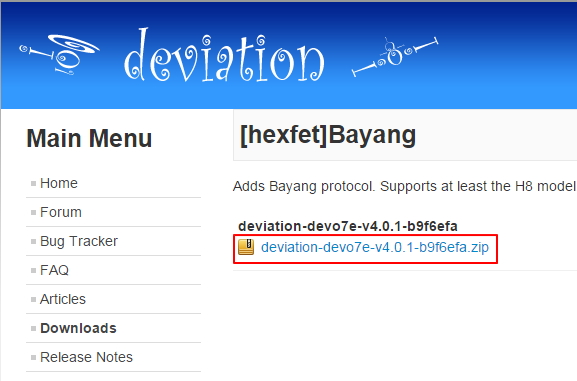
Installation is almost same as NightlyBuild, after upgrade .dfu file ,you just copy "protocol" directory to usb drive.
Replied by dc59 on topic Eachine or JJRC H8 mini ?
Phillycopter8 wrote: Hi I'm still new to deviationtx, would a complete novice be able to put this new protocol on a devo 7e transmitter? Am I better off waiting for a new nightly build to install because I have now idea what to do with the links in this thread? Cheers guys, looking forward to flying the h8 mini with the devo 7e!
EDIT:: I had to be signed in to download the devo 7e test build.. I just install it like a nightly correct? Thanks
Yes, you can download newest test build HERE
or follow these steps to download it.
Installation is almost same as NightlyBuild, after upgrade .dfu file ,you just copy "protocol" directory to usb drive.
Last edit: 23 Jul 2015 08:49 by dc59.
- Phillycopter8
-
- Offline
Less
More
- Posts: 3
23 Jul 2015 08:57 #35835
by Phillycopter8
Replied by Phillycopter8 on topic Eachine or JJRC H8 mini ?
Cheers dc59, I nearly figured it out except forgot to copy over the protocol files, the h8mini is such a beast now.
Now it's time to play around with the mixer.
Now it's time to play around with the mixer.
- Zaphod
-
- Offline
Less
More
- Posts: 103
23 Jul 2015 11:10 - 23 Jul 2015 11:21 #35838
by Zaphod
Replied by Zaphod on topic Eachine or JJRC H8 mini ?
I need to give this a go. Thanks for the instructions on how to install this protocol!
Is there a model file made or is everyone making their own?
Edit - just went to download the test build. It says 7e so will it work on the 10?
Thanks
Is there a model file made or is everyone making their own?
Edit - just went to download the test build. It says 7e so will it work on the 10?
Thanks
Last edit: 23 Jul 2015 11:21 by Zaphod.
- hexfet
-
- Offline
Less
More
- Posts: 1971
23 Jul 2015 15:54 #35862
by hexfet
Replied by hexfet on topic Eachine or JJRC H8 mini ?
I've uploaded a test build for the devo 10.
This protocol does require the nRF24L01 module.
This protocol does require the nRF24L01 module.
- Zaphod
-
- Offline
Less
More
- Posts: 103
23 Jul 2015 23:32 #35879
by Zaphod
Replied by Zaphod on topic Eachine or JJRC H8 mini ?
Thanks dude! Love your work
- Zaphod
-
- Offline
Less
More
- Posts: 103
24 Jul 2015 06:36 #35886
by Zaphod
Replied by Zaphod on topic Eachine or JJRC H8 mini ?
hmmm it appears that you can't have the protocol for the H7 at the same time as the protocol for the H8.
I'll stick with the H8 for now
I'll stick with the H8 for now
Time to create page: 0.377 seconds
-
Home

-
Forum
-
Development
-
Protocol Development
- Eachine or JJRC H8 mini ?