11. Erweiterte Inhalte¶
11.1. Lehrer/Schüler-Einrichtung¶
Deviation kann dazu benutzt werden um entweder als Lehrersender (Master) oder als Schülersender (Slave) in einer Lehrer- / Schülerkonfiguration tätig zu sein. In diesem Modus verbinden der Lehrer und der Schüler ihre jeweiligen Sender mittels eines Trainerkabels über die DSC-Buchse. Der Lehrersender kommuniziert dabei eigentlich mit dem Modell, aber der Lehrer kann einen Schalter benutzen um dem Schüler die Kontrolle des Modells zu ermöglichen. Wenn der Schalter aktiv ist, sendet der Schülersender die Eingabe (Knüppel) Informationen über das Trainerkabel an den Lehrersender und diese Eingaben ersetzen die Lehrereingaben.
Deviation kann konfiguriert werden um mit nahezu jedem Sender zu arbeiten, der entweder Lehrer- oder Schülermodus unterstützt. Deviation auf einen anderen Hersteller einzustellen erfordert Kenntnisse über die PPM Parameter des gepaarten Senders und die saubere Konfiguration von ‚Mitte PW‘ [‚Center PW‘] und ‚Delta PW‘ sowie zu wissen, wie viele Kanäle übertragen werden und wie die Kanalreihenfolge ist. Der beste Ort um diese Informationen zu finden ist das Forum auf www.deviationtx.com.
11.1.1. Lehrermodus [Master mode]¶
Der Lehrermodus wird durch Auswahl von entweder ‚Kanal‘ [Channel] oder ‚Knüppel‘ [Stick] aus der ‚PPM Eingang‘ [PPM In] Spin-Box in Modelleinstellungen [Model setup] (Standard & Advanced GUI) . Drücken von ‚ENT‘ auf entweder ‚Knüppel‘ [Stick] oder ‚Kanal‘ [Channel] zeigt die ‚Lehrer/Sch.‘ [Trainer Cfg] Seiten. Die beiden Modi verhalten sich leicht unterschiedlich:
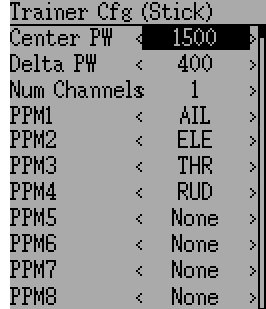
Knüppel [Stick]: Im Knüppelmodus ist jeder Eingangskanal auf einem Knüppel des Lehrersenders abgebildet. In diesem Modus verhält sich die Bewegung des Schülerknüppels genauso, als ob der Lehrer den Knüppel bewegt hätte. Generell wird, wenn dieser Modus benutzt wird, der Schülersender die Knüppelposition direkt (ohne Mischer) weiterleiten und der Lehrersender wird das notwendige Mischen übernehmen.
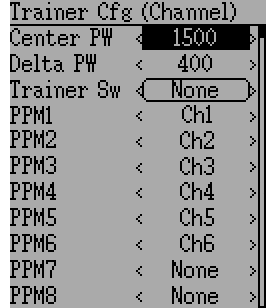
Kanal [Channel]: Im Kanalmodus ist jeder Eingangskanal auf Ausgangskanal des Lehrersenders abgebildet. In diesem Modus sollte der Schülersender das notwendige Mischen zur Kontrolle des Modells erledigen. Es ist sicherzustellen, dass Lehrer- und Schülersender identisch konfiguriert sind, andernfalls könnte das Modell nicht richtig reagieren wenn zwischen Lehrer und Schüler-Kontrolle umgeschaltet wird.
Konfigurierbare Optionen auf beiden Lehrer/Sch. [Trainer Cfg] Seiten:
- Mitte PW [Center PW]: Definiert die Zeit (in μs) des Pulses die der Schülersender überträgt um die Servomitte abzubilden. Falls dieser Wert nicht zum Schülersender passt, werden die Servos nicht zentriert.
- Delta PW: Definiert die Breite des Pulses (gemessen von der Mitte) die der Schülersender überträgt um den maximalen Servoausschlag zu definieren. Falls dieser Wert nicht korrekt ist, werden die Servos nicht den vollen Weg erreichen (oder werden sich zu viel bewegen).
- Lehr.Schalt [Trainer Sw]: Definiert den Schalter, der es ermöglicht, dass der Schüler die Kontrolle über das Modell bekommt.
- PPM1…PPM8: Definiert die Zuweisungen (entweder Kanal oder Eingabe) vom Schülersender zum Lehrer.
11.1.2. Schülermodus¶
Der Schülermodus wird durch Auswahl von ‚PPM‘ als Protokoll in Kapitel Modelleinstellungen [Model setup] (Standard & Advanced GUI) konfiguriert. Drücken von ‘ENT’ auf der Protokoll Spin-Box ermöglicht die Einstellung der Ausgabeoptionen. Siehe Abschnitt Protokoll: USBHID. Beachten Sie, dass Deviation die Kanalausgangsdaten per PPM versendet. Um Deviation als Schülersender mit einem Deviation Lehrersender als ‚Knüppel‘ Modus konfiguriert zu benutzen (siehe oben), sollte keine Mischung im Schülersender stattfinden.
11.2. Einrichtung von FPV oder anderen externen Eingaben¶
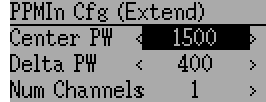
Deviation ermöglicht es, PPM Eingangssignale von einer externen Quelle zu nutzen (wie beispielsweise ein FPV Aufbau). Um diesen Modus zu konfigurieren, setzen Sie im Abschnitt Modelleinstellungen [Model setup] (Standard & Advanced GUI) den ‚PPM Eingang‘ [PPM In] auf ‚Erweitert‘ [‚Extend‘].
Wurde dieser aktiviert, drücken Sie ‘ENT’ auf der ‚PPM Eingang‘ Spin-Box um die zusätzlichen Eingänge zu konfigurieren.
Konfigurationen:
- Mitte PW [Center PW]: Definiert die Pulsweite für einen zentrierten Eingang (in μs).
- Delta PW: Definiert den Unterschied in Pulsweite (gemessen von der Mitte) um den minimalen oder maximalen Servoweg zu erreichen.
- Anz.Kanäle [Num Channels]: Definiert die Anzahl der Eingangskanäle (generell werden nicht mehr als 8 unterstützt).
11.3. Benutzung eines Trimmknopfes als virtuellen Schalter¶
Deviation kann virtuelle Schalter erstellen, um die mechanischen Schalter zu ergänzen. Diese Fähigkeit ist nur bei Benutzung der Erweiterten GUI [Advanced GUI] verfügbar. Es sind 3 Schaltertypen verfügbar:
- Taster [Momentary]: Der Schalter ist solange aktiv, wie der Trimmknopf gehalten wird.
- Wechsler [Toggle]: Der Schalter wechselt jedes Mal von Ein auf Aus oder von Aus auf Ein, wenn der Trimmer gedrückt wird.
- Ein/Aus [On/Off]: Der Trim+ Knopf schaltet den Schalter ein, und der Trim- Knopf schaltet ihn aus.
- 3 Pos: Der Schalter ist in einer Richtung aktiv, solange die Trim+ Taste gedrückt wird, und in die anderer Richtung solange die Trim- Taste gedrückt wird. Beim Loslassen wird wieder der Mittelpunkt eingenommen.
Um einen virtuellen Schalter einzurichten, beginnen Sie durch Auswahl der Trimmung von der ‚Trimm-Einstellungen‘ Seite und Öffnen der Bearbeiten-Seite [Edit]. Siehe auch Trimmung und Virtuelle Eingänge [Trims] (Advanced GUI).
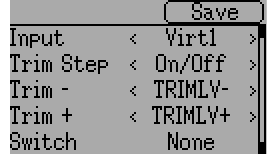
Als nächstes setzen sie den ‚Schritt [Trim Step]‘ auf ‚Taster [Momentary]‘, ‚Wechsler [Toggle]‘, ‚Ein/Aus [On/Off]‘ oder ‚3 Pos‘. Dieses erreichen Sie durch Drücken von Links auf der ‚Schritt [Trim Step]‘ Spin-Box bis der Wert kleiner als 0.1 ist. Anschließend wählen Sie als ‚Eingang [Input]‘ den virtuellen Kanal, der zum Schalter konvertiert werden soll (wir benutzen ‚Virt1‘).
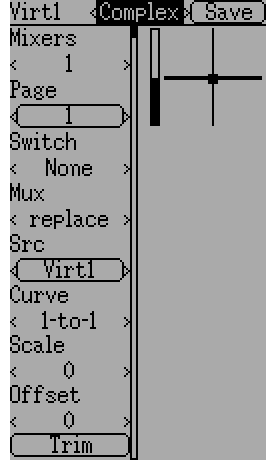
Gehen Sie jetzt zu der ‚Mischer [Mixer]‘ Seite und rufen die Konfiguration für den gewählten virtuellen Kanal auf (Virt1 in unserem Beispiel).
Setzen Sie den Mischertyp auf ‚Komplex [Complex]‘ und setzen Sie die ‚Quelle [Src]‘ auf den aktuellen virtuellen Kanal (‚Virt1‘), setzen Sie die ‚Kurve [Curve]‘ auf ‚1-zu-1 [1-to-1]‘ (NICHT ‚Fest [Fixed]‘ benutzen), setzen Sie ‚Skalierung [scale]‘ auf ‚0‘ und letztlich aktivieren Sie die ‚Trimmung [Trim]‘.
Sie können jetzt den virtuellen Kanal (‚Virt1‘) wie jeden anderen Schalteingang benutzen. Falls der virtuelle Schalter aktiv ist, hat der virtuelle Kanal einen Wert von 100, andernfalls wird er einen Wert von -100 haben. Im Falle von ‚3 Pos‘ hat der Kanal einen Wert von -100 bei Drücken von Trim-, +100 in der Gegenrichtung und 0 in der Mittelstellung.
Hinweis: Falls Sie einen virtuellen Kanal als eine ‚Quelle [Src]‘ nutzen (im Gegensatz zu einem ‚Schalter [switch]‘) stellen Sie sicher, dass die ‚Trimmung [trim]‘ für diesen Mischer deaktiviert ist, andernfalls wird die Trimmung zweifach angewandt.
11.4. Taumelscheibenmischer¶
Eine Taumelscheibe wird benutzt um den Flug eines RC Hubschrauber zu kontrollieren. Die Taumelscheibe kontrolliert die Drehebene des Hauptrotors genauso wie die Blattwinkel [Pitch]. Eine Taumelscheibe ist normalerweise mit 3 Servos verbunden, die als Höhenruder, Querruder und Kollektiv bekannt sind. Aufgrund ihrer Konstruktion ist jedoch kein 1-zu-1-Verhältnis zwischen Knüppel- und Servobewegung gegeben. Stattdessen ist ein wenig Mischung zwischen den Gas-, Höhenruder- und Querruderknüppeln und den Taumelscheibenservos notwendig. Diese Mischung is als ‚Cyclic Collective Pitch Mixing‘ (CCPM) bekannt.
Traditionell benutzten RC Hubschrauber eine Paddelstange oberhalb oder unterhalb des Hauptrotors verbunden mit einer Reihe von Verbindern um die Stabilität zu gewährleisten. In diesem Aufbau übernimmt der Sender normalerweise alle Mischaufgaben und steuert direkt alle 3 Taumelscheibenservos. Diese Konfiguration ist bekannt als ‚manual CCPM‘ (mCCPM). Alternativ kann ein elektronischer Mischer im Hubschrauber entweder als Teil des Empfängers oder zwischen Empfänger und Servos eingebunden werden, der die exakte Mischung umsetzt. Diese Konfiguraton ist bekannt als ‚electronic CCPM‘ (eCCPM) und in diesem Fall liefert der Empfänger direkt Querruder, Höhenruder und die kollektiven Eingaben. Der elektronische Mischer konvertiert dann die Signale in entsprechende Bewegungen der Taumelscheibenservos.
Unlängst sind paddelstangenlose Hubschrauber (flybarless – FBL) gängig geworden, insbesonders im Bereich der Mikromodelle. Diese Hubschrauber benutzen ein eCCPM-System zusammen mit einem elektronischen Kreisel um die Stabilität durch fortlaufende Anpassung der Taumelscheibe sicherzustellen, ohne eine physische Paddelstange zu benötigen. Dieser Aufbau kann günstiger hergestellt werden und liefert außerdem eine bessere Stabilität und genauere Kontrolle.
Deviation bietet die Steuerung für verschiedene Taumelscheibenausführungen. Diese beinhalten: 120°, 120° Alternativ, 140°, 90° und keine:
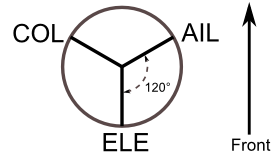
120 (3 Servo): Die Servos sind um die Taumelscheibe in 120° Abständen platziert. Bei Querrudergabe neigen die Querruder- und Pitch- Servos die Taumelscheibe nach links und rechts, bei Höhenrudergabe schwenken die drei Servos die Taumelscheibe nach vorne und hinten, bei Pitchgabe heben alle drei Servos die Taumelscheibe hoch und runter. Übereinstimmend arbeitende Servos erhöhen dramatisch das verfügbare Drehmoment als auch die Präzision und Zentrierung.
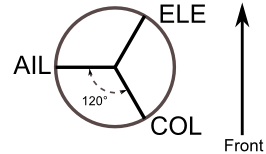
120X (3 Servo): Entspricht der obigen Anordnung mit der Ausnahme, dass die Servos 150° gedreht sind. Bei Querrudergabe neigen alle drei Servos die Taumelscheibe nach links und rechts, bei Höhenrudergabe schwenken das Höhenruder- und das Pitch-Servo die Taumelscheibe nach vorne und hinten, bei Pitchgabe heben alle drei Servos die Taumelscheibe hoch und runter.
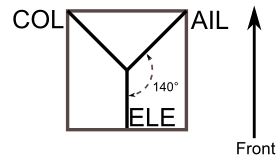
140 (3 Servo): Im Grunde sind die Servobewegungen bei 140° Taumelscheiben nahezu die gleichen wie bei 120° Taumelscheiben. Allerdings unterscheidet sich die Servoanordnung für die Höhenruderbewegung. 140° Taumelscheiben CCPM beitet eine glattere Bewegung der kombinierten Servos und umlaufend gleichmäßigen zyklischen Anteil. Bei einem 120° Aufbau ist zyklisch links/rechts, leicht schneller als vor/zurück zyklisch.
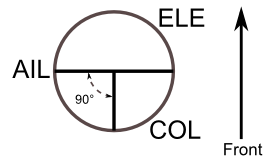
90 (3 Servo): Bei Querrudergabe neigen die Querruder- und Pitch-Servos die Taumelscheibe nach links und rechts, bei Höhenrudergabe schwenken die Servos die Taumelscheibe nach vorne und hinten, bei Pitchgabe heben alle drei Servos die Taumelscheibe hoch und runter. Überwiegend bei elektrischen Hubschraubern benutzt.
Keine [None]: Dies ist ein Spezialfall, wo die komplette Mischung unter Benutzung eines 3-Achs-Stabilisierungssystems im Hubschrauber gemacht wird. Bitte schlagen Sie in den genauen Herstellerinstruktionen nach, wie die Mischerausgaben konfiguriert werden.
Hinweis: Manche Hubschrauber sind 120 oder 140, aber um 180 Grad gedreht. In diesen Fällen verwenden Sie weiterhin die zugehörige Taumelscheibe, müssen aber möglicherweise bestimmte Kanäle umkehren.
11.5. Töne verändern¶
Sie können die Töne ihrer Devo verändern, müssen hierzu jedoch den Sender als USB-Laufwerk verbinden und die Datei ‚sound.ini‘ im Ordner ‚media‘ editieren.
Folgende Sektionen sind in der Datei verfügbar:
- startup: Einschalten des Senders.
- shutdown: Ausschalten des Senders.
- volume: Verändern der Senderlautstärke.
- timer_warning: Ein Timer wird in Kürze ablaufen.
- alarm#: Timer # (1 bis 4) ist abgelaufen.
- batt_alarm: Niedriger Batteriestand.
- done_binding: Bindung abgeschlossen.
- key_pressing: Druck einer Taste.
- saving: Speichern einer Modellkonfiguration.
- max_len: Überschreiten der maximalen Länge einer Bezeichnung.
- telem_alarm#: Telemetriealarm # (1 bis 6) wurde ausgelöst.
Innerhalb jeder Sektion kann die Lautstärke [‚volume‘] von 0 (aus) bis 100 (Maximum) eingestellt werden. Die restlichen Einträge sind Notennamen mit der jeweiligen Spieldauer in Millisekunden. Es können maximal 100 Noten pro Sektion eingegeben werden.
Um eine Pause zu spielen geben Sie ‚xx‘ an. Eine Note wird mit Ihrer Bezeichnung (‚a‘ bis ‚g‘), gegebenenfalls einem Vorzeichen (‚x‘ für ‚a‘, ‚c‘, ‚d‘, ‚f‘, ‚g‘) und der zuspielenden Oktave von ‚0‘ bis ‚4‘ definiert. Somit kann ein Notenbereich von ‚c0‘ bis ‚b4‘ gespielt werden. Zusätzlich können die drei Noten ‚a‘, ‚ax‘ und ‚b‘ unterhalb von ‚c0‘ wiedergegeben werden.