10. Protokoll¶
Einige Protokolle haben zusätzliche Einstellungen oder Begrenzungen. Jedes Protokoll ist im folgenden beschrieben. Falls ein Sternchen (‚*‘) vor dem Protokollnamen angezeigt wird, bedeutet das, dass dieses Protokoll momentan nicht vom Sender unterstützt wird, da ein notwendiges Modul vom Deviation nicht erkannt wurde (nicht installiert ist, in hardware.ini nicht konfiguriert oder nicht korrekt verbunden). Mehr Information können Sie in der Modulinstallationsanleitung finden:
http://www.deviationtx.com/wiki/#hardware_modifications
10.1. Protokoll: DEVO¶
Das DEVO Protokoll wird benutzt um die Kompatibilität zu den Walkera DEVO Empfängern/Modellen zu erhalten. Dieses Protokoll unterstützt bis zu 12 Kanäle. Das DEVO Protokoll unterstützt automatisches Binden als auch manuelles Binden. Falls eine Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, versucht der Sender bei jedem Anschalten automatisch den Empfänger zu binden. Falls der Wert auf eine feste ID gesetzt ist, muss der Empfänger einmalig von Hand mit dem ‚Binden‘ [‚Bind‘] Knopf gebunden werden; danach sollte er gebunden bleiben. Beachten Sie, dass die Feste ID nur Teil des Bindevorganges ist. Zwei Sender mit der gleichen ID können nicht das gleiche Modell kontrollieren.
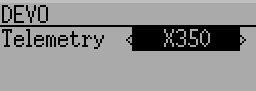
Das DEVO Protokoll unterstützt ebenfalls Aktivieren und Deaktivieren der Telemetriefähigkeit. Diese Option ist zugänglich durch Drücken des Protokoll Drehfelds wenn DEVO angezeigt wird. Die Optionen sind Std (Standard Format), X350 (Walkera QR-X350 Format), und Off.
Die folgenden Felder sind in der DEVO Telemetrie verfügbar. Beachten Sie, dass nicht alle Modelle / Empfänger alle Felder rückmelden und dass einige Felder extra aktivierte Module benötigen.
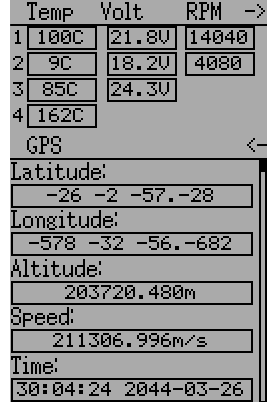
- Temp1/2/3/4: Temperaturanzeigen. Dies können Batterie-, Motor- oder Umgebungswerte sein.
- Volt1/2/3: Spannungsanzeigen für Empfängerbatterie und externe Batterien.
- UPM1/2: Motor-/Maschinen Drehzahl
- GPS Data: Aktuelle Position, Geschwindigkeit und Höhe vom GPS Modul
10.2. Protokoll: WK2801¶
Das WK2801 Protokoll wird benutzt um ältere Walkera Modelle zu steuern. Die ehemaligen Walkera Modelle waren in 3 ähnliche aber nicht identische Protokolle aufgeteilt: WK2801, WK2601, WK2401. Dieses stimmt ungefähr mit der Anzahl der unterstützen Kanäle überein, aber viele der neueren 6-Kanal Empfänger unterstützen sogar das WK2801 Protokoll. Wir empfehlen das WK2801 Protokoll zuerst auszuprobieren sofern Sie mit älteren Walkera Modellen arbeiten bevor Sie das WK2601 oder das WK2401 versuchen, da das WK2801 das höhere Protokoll ist. Das WK2801 Protokoll unterstützt bis zu 8 Kanäle und Automatisches Binden als auch Manuelles Binden. Falls eine Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, versucht der Sender bei jedem Anschalten automatisch den Empfänger zu binden. Falls der Wert auf eine feste ID gesetzt wurde, muss der Empfänger einmalig von Hand mit dem ‚Binden‘ [‚Bind‘] Knopf gebunden werden; danach sollte er gebunden bleiben.
10.3. Protokoll: WK2601¶
Das WK2601 Protokoll wird benutzt um ältere Walkera Modelle zu steuern. Die ehemaligen Walkera Modelle waren in 3 ähnliche aber nicht identische Protokolle aufgeteilt: WK2801, WK2601, WK2401. Dieses stimmt ungefähr mit der Anzahl der unterstützen Kanäle überein, aber viele der neueren 6-Kanal Empfänger unterstützen sogar das WK2801 Protokoll. Wir empfehlen das WK2801 Protokoll zuerst auszuprobieren sofern Sie mit älteren Walkera Modellen arbeiten bevor Sie das WK2601 oder das WK2401 versuchen, da das WK2801 das höhere Protokoll ist. Das WK2601 Protokoll unterstützt bis zu 7 Kanäle und nur Automatisches Binden. Eine feste ID kann benutzt werden, verhindert aber nicht, das Automatische Binden während des Einschaltens.
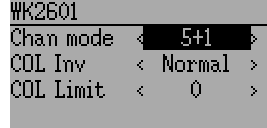
Das WK2601 Protokoll unterstützt außerdem zusätzliche Optionen. Diese sind zugänglich durch Drücken des Protokoll Drehfelds wenn WK2601 angezeigt wird:
K Modus [Chan mode]: Setzt wie die Kanäle verarbeitet werden:
- 5+1: QR, HR, GAS, SR, GYRO (K7) sind proportional. FAHRW (K5) ist binär. K6 ist deaktiviert.
- Heli: QR, HR, GAS, SR, GYRO sind proportional. Fahrw (K5) ist binär. COL (K6) ist mit Gas verknüpft. Falls K6 >=0 ist, wird der Empfänger eine 3D Kurve auf Gas anwenden. Falls K6 <0 ist, wird der Empfänger eine normale Kurve auf Gas anwenden. Der Wert des K6 definiert das Verhältnis von COL zu Gas.
- 6+1: QR, HR, GAS, SR, COL (K6), GYRO (K7) sind proportional. Fahrw (K5) ist binär. Dieser Modus ist hoch experimentell.
- COL Inv: Invertiert das COL Servo.
- COL Limit: Setzt den maximalen Weg des COL Servos.
10.4. Protokoll: WK2401¶
Das WK2401 Protokoll wird benutzt um ältere Walkera Modelle zu steuern. Die ehemaligen Walkera Modelle waren in 3 ähnliche aber nicht identische Protokolle aufgeteilt: WK2801, WK2601, WK2401. Dieses stimmt ungefähr mit der Anzahl der unterstützen Kanäle überein, aber viele der neueren 6-Kanal Empfänger unterstützen sogar das WK2801 Protokoll. Wir empfehlen das WK2801 Protokoll zuerst auszuprobieren sofern Sie mit älteren Walkera Modellen arbeiten bevor Sie das WK2601 oder das WK2401 versuchen, da das WK2801 das höhere Protokoll ist. Das WK2401 Protokoll unterstützt bis zu 4 Kanäle und nur Automatisches Binden. Eine feste ID kann benutzt werden, verhindert aber nicht, dass Automatische Binden während des Einschaltens.
10.5. Protokoll: DSM2¶
Das DSM2 Protokoll wird benutzt um viele Spektrum™, JR™ und auch andere Modelle zu steuern, die dieses Protokoll benutzen. Das DSM2 Protokoll unterstützt bis zu 12 Kanäle. Beachten Sie, dass viele Empfänger mit weniger als 8 Kanälen erfordern, dass der Sender 7 oder weniger Kanäle sendet. Stellen Sie sicher, dass die Anzahl der Kanäle passend zum Empfänger eingestellt ist. DSM2 unterstützt kein automatisches Binden. Falls eine Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird anstelle dessen eine senderspezifische ID benutzt. Es ist notwendig, jedes Modell vor der ersten Benutzung manuell zu binden.
Beachten Sie das die Bindung nicht beendet wird, bis Sie QR oder HR Knüppel bewegen. Dies wurde vorgesehen um die Möglichkeit zu geben, den Failsafe Knopf an manchen DSM-Empfängern zu drücken um den Failsave-Wert zu setzen.
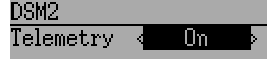
Das DSM2 Protokoll unterstützt ebenfalls Aktivieren und Deaktivieren der Telemetriefähigkeit. Diese Option ist zugänglich durch Drücken des Protokoll Drehfelds wenn DSM2 angezeigt wird.
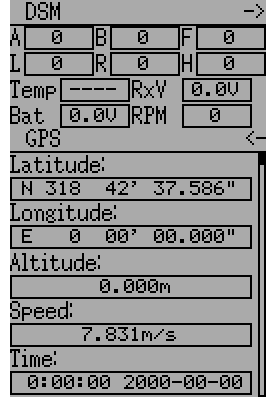
Die folgenden Felder sind in der DSM2 Telemetrie verfügbar. Beachten Sie, dass ein bestimmtes Telemetriemodul und zusätzliche Sensoren benötigt werden um diese Daten aufzuzeichnen.
- Ausblendungen A/B/L/R: Die Anzahl der schlechten Signale, die jede Antenne empfangen hat. Idealerweise sollten die Zahlen ähnlich sein um anzuzeigen, dass jede Antenne gleichmäßigen Empfang hat.
- Verluste (Loss - F): Anzahl wie oft ein kompletter Signalverlust (verworfenes Paket) aufgetreten ist.
- (H)olds: Die Anzahl wie oft der Empfänger den Fail-Safe Modus aufgrund Signalverlustes aufgenommen hat
- Volt1/2: Spannungsanzeigen für Empfängerspannung und eine externe Quelle
- UPM: Motor-/Maschinendrehzahl
- Temp: Temperatur von einem externen Temperatursensor
- GPS Data: Aktuelle Position, Geschwindigkeit und Höhe vom GPS Modul
10.6. Protokoll: DSMX¶
Das DSMX Protokoll wird benutzt um viele Spektrum™, JR™ und auch andere Modelle zu steuern, die dieses Protokoll benutzen. Das DSMX Protokoll unterstützt bis zu 12 Kanäle. Beachten Sie, dass viele Empfänger mit weniger als 8 Kanälen erfordern, dass der Sender 7 oder weniger Kanäle sendet. Stellen Sie sicher, dass die Anzahl der Kanäle passend zum Empfänger eingestellt ist. DSMX unterstützt kein automatisches Binden. Falls eine Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird anstelle dessen eine senderspezifische ID benutzt. Es ist notwendig, jedes Modell vor der ersten Benutzung manuell zu binden.
Beachten Sie das die Bindung nicht beendet wird, bis Sie QR oder HR Knüppel bewegen. Dies wurde vorgesehen um die Möglichkeit zu geben, den Failsafe Knopf an manchen DSM-Empfängern zu drücken um den Failsave-Wert zu setzen.
Beachten Sie, dass anders als Spektrum™ und JR™ Sender, Deviation nicht automatisch zwischen DSM2 und DSMX auswählt. Der Benutzer muss das zu benutzende Protokoll auswählen.

Das DSMX Protokoll unterstützt ebenfalls Aktivieren und Deaktivieren der Telemetriefähigkeit. Diese Option ist zugänglich durch Drücken des Protokoll Drehfelds wenn DSMX angezeigt wird.
Die Liste der DSMX Telemetriefelder ist identisch mit denen des DSM2 Protokolls, die in Abschnitt Protokoll: DSM2 dokumentiert sind.
10.7. Protokoll: J6Pro¶
Das J6Pro Protokoll wird benutzt um Nine Eagles™ Modelle zu unterstützen. Nur kompatible Modelle mit J6Pro Empfänger können benutzt werden. Viele ältere 4-Kanal Nine Eagles Modelle benutzen ein anderes Protokoll welches nicht unterstützt wird. Das J6Pro Protokoll unterstützt bis zu 12 Kanäle, obwohl nur Modelle mit 6 Kanälen getestet sind. J6Pro unterstützt kein Automatisches Binden. Falls eine Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist,wird anstelle dessen eine senderspezifische ID benutzt. Es ist notwendig jedes Modell vor der ersten Benutzung manuell zu binden.
10.8. Protokoll: WFLY¶
Das WFLY Protokoll unterstützt WFLY Empfänger wie z.B. WFR04S, WFR07S und WFR09S.
Das Protokoll unterstützt bis zu 9 Kanäle. Die Kanalreihenfolge ist AETR.
10.9. Protokoll: *Flysky¶
Das Flysky Protokoll wird benutzt um Turnigy / Flysky Empfänger und auch einige wenige ältere Modelle, die das gleiche Protokoll benutzen zu steuern (WL V911, Xieda 9958, usw.). NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das Flysky Protokoll unterstützt bis zu 12 Kanäle sowie automatisches Binden als auch manuelles Binden. Falls eine Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, versucht der Sender bei jedem Anschalten automatisch den Empfänger zu binden. Falls der Wert auf eine feste ID gesetzt ist, muss der Empfänger einmalig von Hand mit dem ‚Binden‘ [‚Bind‘] Knopf gebunden werden; danach sollte er gebunden bleiben.
Das Flysky Protokoll unterstützt auch die WLToys Erweiterungen des Protokolls. Diese können durch Drücken der Protokoll Drehfeld eingestellt werden:
V9x9: Aktiviert die Erweiterungen für WLToys V939, V949, V959, V959 etc.
- Lichter werden von Kanal 5 gesteuert
- Video wird von Kanal 6 gesteuert
- Kamera wird von Kanal 7 gesteuert
- Flip wird von Kanal 8 gesteuert
V6x6: Aktiviert die Erweiterungen für WLToys V636 und V686 Modelle.
- Lichter werden von Kanal 5 gesteuert
- Flip wird von Kanal 6 gesteuert
- Kamera wird von Kanal 7 gesteuert
- Video wird von Kanal 8 gesteuert
- Headless wird von Kanal 9 gesteuert
- RTH wird von Kanal 10 gesteuert
- X und Y Kaliration werden von Kanal 11 bzw. 12 gesteuert
V912: Aktiviert die Erweiterungen für WLToys V912, V913 und V915 Helikopter
Beachten Sie, falls diese Kanäle einem Schalter zugeordnet sind, dass das Einschalten des Schalters den Status umschaltet. Ausschalten hat keine Wirkung. Um demzufolge die Lichter anzuschalten, wechseln Sie den Schalter, dem Kanal 5 zugeordnet ist, von AUS auf AN. Zurückschalten auf AUS hat keine Wirkung. Den Schalter zurück auf AN schaltet die Lichter wieder aus.
10.10. Protokoll: *AFHDS-2A¶
Das AFHDS-2A Protokoll wird für Turnigy/Flysky AFHDS-2A Empfänger verwendet. NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das AFHDS-2A Protokoll unterstützt bis zu 14 Kanäle und erfordert manuelles Binden. Der Empfänger muss einmalig manuell mittels ‚Binden‘ [Bind] Schaltfläche gebunden werden, danach bleibt er verbunden.
Konfigurierbare Optionen für AFHDS-2A:
- Ausgänge [Outputs]: Konfiguriert des Ausgabetyp des Empfängers, PWM+IBUS, PPM+IBUS, PWM+SBUS oder PPM+SUBS
- Servo Hz: Konfiguriert die PWM Aktualisierungsfrequenz des Empfängers zwischen 50 Hz und 400 Hz
- LQI output: Ausgabe von LQI an einen optionalen Kanal.
- Freq-fine: Einstellung des Frequenzversatz. Werte zwischen -300 und 300. Wird verwendet, um Unterschiede zwischen verschiedenen A7105-Modulen auszugleichen. Standardwert ist 0. Der LQI Telemetriewert kann als Indikator für die Einstellung des Frequenzversatz verwendet werden.
Telemtrie wird unterstützt.
10.11. Protokoll: *Hubsan4¶
Dieses Protokoll wird in den Husband-X4 Quadrokoptern der H107 Serie, H111, H101, H102, H201, H202 Hubschraubern und dem Estes Proto X (jedoch nicht Proto X SLT) verwendet. (regular format).
Dieses Protokoll wird für Hubsan H301F, H302F, H303F und H304F verwendet (H301 Format).
Dieses Protokoll wird für Hubsan H501S, H122D und H123D verwendet (H501 Format).
NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Das Hubsan4 Protokoll unterstützt bis zu 13 Kanäle und unterstützt im regular Format nur automatisches Binden. Eine feste ID kann verwendet werden, verhindert jedoch nicht die automatische Bindung beim Einschalten. Die ersten 4 Kanäle bilden Querruder, Höhenruder, Gas und Seitenruder ab. Zusätzliche Kanäle steuern die Spezialfunktionen des Quadrokopters:
Im H301 und H501 Format ist es erforderlich, vor der ersten Verwendung eine manuelle Kopplung mit jedem Modell durchzuführen.
- Kanal 5 steuert die LEDs
- Kanal 6 aktiviert je nach Format den ‘flip’ Modus, ‘altitude hold’ oder den ‘stabilized mode’.
- Kanal 7 schaltet Video ein/aus (H102) oder macht eine Einzelbildaufnahme.
- Kanal 8 macht Einzelbildaufnahmen
- Kanal 9 schaltet Headless Mode ein/aus
- Kanal 10 aktiviert die Return-to-home-Funktion
- Kanal 11 aktiviert GPS hold.
- Channel 12 Sets Sport 1, Sport 2 or Acro mode (H123D)
- Channel 13 Enables ‘flip’ mode (H122D)
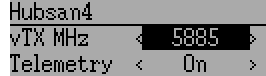
Konfigurierbare Optionen auf der Hubsan Seite:
- vTX MHz: Legt die Frequenz fest, die vom Hubsan H107D Videosender benutzt wird (benötigt einen 5,8GHz Empfänger der fähig ist, Video zu empfangen und anzuzeigen).
- Telemetrie [Telemetry]: Ermöglicht den Empfang der Batteriespannung.
- Freq-fine: Einstellung des Frequenzversatz. Werte zwischen -300 und 300. Wird verwendet, um Unterschiede zwischen verschiedenen A7105-Modulen auszugleichen. Standardwert ist 0.
10.12. Protokoll: *Joysway¶
Das Joysway Protokoll unterstützt die Joysway Carribean Modellyacht und den J4C12R-Empfänger der in Joysway Orion, Explorer, Dragon Force 65 und Force 2 60 Modellen verwendet wird. Keine anderen Modelle oder Empfänger wurden mit diesem Protokoll getestet, ebenso keine Flugmodellvarianten des J4C12R. NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das Joysway Protokoll unterstützt bis zu vier Kanäle, unterstützt kein automatisches Binden, aber bindet immer wenn ein Empfänger dies anfordert. Wenn Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird eine senderspezifische ID verwendet. Es ist erforderlich, jedes Modell vor der ersten Verwendung zu binden.
Der erste Kanal steuert in der Regel die Segel und der zweite Kanal das Ruder, es kann jedoch von Modell zu Modell Abweichungen geben.
10.13. Protokoll: *Bugs3¶
Das Bugs3 Protokoll wird für den MJX Bugs3 und Bugs8 verwendet. NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Zur Bindung zunächst das Bugs3-Protokoll wählen und Binden drücken. Anschließend das Modell an die Stromversorgung anschließen. Der Verbindungsdialog verschwindet, sobald die Bindung erfolgreich war. Die ID des Modells wird automatisch im Feld fixed ID gespeichert. Dieser Wert darf nicht geändert werden.
Die folgenden Kanäle werden für Sonderfunktionen verwendet. Eine Kanalwert größer als null aktiviert die Funktion.
- Aktivieren wird von Kanal 5 gesteuert
- Lichter werden von Kanal 6 gesteuert
- Flip wird von Kanal 7 gesteuert
- Kamera wird von Kanal 8 gesteuert
- Video wird von Kanal 9 gesteuert
- Angle/Acro-Modus wird von Kanal 10 gesteuert (>0 ist Angle-Modus)
Telemetrie wird für RSSI und Spannungsalarm unterstützt. Es verwendet den FrSky Telemetriebildschirm, die Signalstärke wird im RSSI-Feld angezeigt und die Batteriespannung in VOLT1. Der Bugs3-Empfänger sendet nur eine ausreichende oder zu niedrige Spannung. Dies wird im VOLT1-Feld als 8.4V für ausreichend oder 6.0V für niedrige Spannung umgesetzt.
10.14. Protokoll: *Frsky-V8¶
Das Frsky-V8 Protokoll wird für ältere Frsky™ Empfänger als Einwegprotokoll Protokoll verwendet. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das Frsky-V8 Protokoll unterstützt 8 Kanäle und kein automatisches Binden. Wenn Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird eine senderspezifische ID verwendet. Es ist erforderlich, jedes Modell vor der ersten Verwendung zu binden.
10.15. Protokoll: *Frsky¶
Das Frsky Protokoll wird zur Steuerung neuerer Frsky™ Empfänger (mit Telemetriefunktion) mit dem bidirektionalen Protokoll (D8) verwendet. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das Frsky Protokoll unterstützt bis zu 8 Kanäle und kein automatisches Binden. Wenn Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird eine senderspezifische ID verwendet. Es ist erforderlich, jedes Modell vor der ersten Verwendung zu binden.
Das Frsky Protokoll unterstützt ebenfalls Aktivieren und Deaktivieren der Telemetriefähigkeit. Diese Option ist zugänglich durch Drücken des Protokoll Drehfelds wenn Frsky angezeigt wird.
Falls Telemetrie aktiviert ist, werden die durch den Empfänger gesendeten Werte (RSSI, VOLT1, VOLT2) unterstützt.
Zusätzliche Hub Telemetriewerte werden wie beim FrskyX Protokoll auf allen Sendern außer 7e und F7 unterstützt. Lesen Sie hierzu die den Abschnitt zur Frsky Telemetrie weiter unten.
10.16. Protokoll: *FrskyX¶
Das FrskyX Protokoll implementiert das Frsky D16 Protokoll einschließlich S.Port und Hub-Telemetrie.
NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
This protocol supports up to 16 channels. Fixed ID binding is supported to link the transmitter with specific receivers. Supports receiver telemetry (RSSI, VOLT1) on all transmitters. Supports S.Port and hub telemetry sensors as well as GPS telemetry (except on memory-limited 7e and f-series) as described in the next section.
Die folgenden Protokolloptionen sind verfügbar.
Freq-fine: Einstellung des Frequenzversatz. Werte zwischen -127 und 127. Wird verwendet, um Unterschiede zwischen verschiedenen CC2500-Modulen auszugleichen. Meist ist ein Versatz von 0 oder -41 erforderlich, jedoch sollte der gesamte Bereich geprüft werden, wenn Probleme mit der Bindung oder der Reichweite bestehen. Standardwert ist 0. Der LQI Telemetriewert kann als Indikator für die Einstellung des Frequenzversatz verwendet werden.
AD2GAIN: Der VOLT2 Telemetriewert (AIN Eingang am X4R) wird mit einem Hundertstel dieses Werts multipliziert. Erlaubt die Anpassung für einen externen Spannungsteiler. Standardwert ist 100 (Faktor 1). Die Werte können zwischen 1 und 2000 (Faktor 0,01 bis 20,00) liegen.
Failsafe: Die Frsky Failsafe Optionen werden vollständig unterstützt. Falls der Kanal Failsafe (in der Mischerkonfiguration) eingestellt wurde wird dieser Wert alle 9 Sekunden zum Empfänger gesendet. Der Empfänger wird diesen Wert im Failsafe Modus verwenden, außer wenn die Protokolloption auf ‚RX‘ gesetzt wurde.
Format: Wählt das passende Protokollformat für den Empfänger. Beide, FCC und EU. Die EU Variante ist kompatibel mit der Frsky LBT Firmware, aber führt den LBT Test nicht tatsächlich aus.
RSSIChan: Wenn auf LastChan eingestellt, wird der empfangene RSSI-Wert auf dem letzten Kanal, ausgehend von der eingestellten Kanalzahl in der Modellkonfiguration, zurück an den Empfänger gesendet. Der Kanalwert entspricht dem empfangenen RSSI-Wert multipliziert mit 21.
S.Port Out: Aktiviert die Ausgabe von S.Port Paketen auf dem DSC-Anschluss und deaktiviert extended-voice.
Bind Mode: The bind mode will control which channels will be connected to the receiver PWM outputs and allow to enable or disable the receivers telemetry during bind.
Version: This will switch between FrSkyX V1.x.x and V2.1.x protocol version.
Für Kanäle ohne eingestellten Failsafe Wert, steuert die Failsafe Protokolloption ‚Hold‘ den Empfänger so, dass der letzte empfangende Kanalwert beibehalten wird, wenn der Empfänger in den Failsafe Modus wechselt. Die ‚NoPulse‘ Einstellung führt dazu, dass keine PPM-Signale gesendet werden (Versuch auf einem X8R ergaben, dass die SBUS Werte minimal wurde, das SBUS-Verhalten ist im Protokoll jedoch nicht spezifiziert). Die Einstellung ‚RX‘ hindert Deviation am Senden von Failsafe Werten, sodass der Empfänger die eigenen Failsafewerte verwendet.
Falls S.Port Out aktiviert ist und PPMIn nicht verwendet wird, werden die S.Port Pakete über den DSC-Anschluss ausgegeben. Die Bitrate beträgt 57600 Baud zwecks Kompatibilität mit S.Port Dekodern, das Signal muss vor Anschluss an einen Standarddekoder invertiert werden. Es kann direkt an Eingang eines 3.3V FTDI-Adapters angeschlossen werden.
10.17. Erweiterte Frsky und FrskyX Telemetrie¶
Erweiterte Telemetrie bezieht sich auf Hub und S.Port Frsky Telemetriesensoren. Diese Sensoren werden in allen Sendern außer 7e unterstützt. Die Daten können über die Telemetrie-Testseite und die Hauptseiten-Datenfelder angezeigt werden.
Die FrskyX S.Port Telemetrie unterstützt den Anschluss von bis zu 16 Sensoren der gleichen Art (z.B. Batteriespannung). Deviation unterstützt mehrere Sensoren der gleichen Art, es wird jedoch nur ein Telemetriewert gespeichert. Der zuletzt empfangene Wert aller Sensoren der gleichen Art wird angezeigt.
Telemetriewerte werden mit langem Druck auf die „Hoch“-Taste [up] während der Anzeige der Telemetrieseite zurückgesetzt. Für Frsky Telemetrie wird hiermit die Variometer-Nullhöhe auf den nächsten empfangenen Wert gesetzt. Außerdem werden der Batterieentladungszähler und die minimale Zellenspannung zurückgesetzt. Die Variometer-Nullhöhe wird in der Modelldatei gespeichert, sodass er nach dem Wiedereinschalten direkt zur Verfügung steht - der Wert ist im Verlaufe eines Tages bei stabilem Luftdruck relativ konstant.
Telemetrie Testseite
Die folgende Tabelle zeigt das Layout der Telemetrie Testseite.
| Devo10 | ||
|---|---|---|
| Misc | Bat | Cells |
| RSSI | VOLT1 | CELL1 |
| TEMP1 | VOLT2 | CELL2 |
| TEMP2 | VOLT3 | CELL3 |
| RPM | MINCELL | CELL4 |
| FUEL | ALLCELL | CELL5 |
| ALTITUDE | VOLTA | CELL6 |
| VARIO | CURRENT | DISCHARGE |
| LQI | LRSSI | |
| Devo7e | ||
|---|---|---|
| Misc | Bat | Signl |
| RSSI | VOLT1 | LQI |
| VOLT2 | LRSSI | |
Der ALTITUDE Wert wird als Höhe über Grund ausgegeben. Referenzhöhe ist dabei die erste Telemetriehöhe die empfangen wurde.
Der LQI (Verbindungsqualitätsindikator) und der LRSSI (lokale Verbindungsstärke) geben Auskunft über Signalstärke und -qualität des empfangenen Telemetriesignals. Der LQI kann als Indikator für die Feinabstimmung des Frequenzversatz benutzt werden. Niedrige LQI-Werte sind besser, typische Werte sind unter 50. Die Einheit der LRSSI entspricht (in etwa) dBm.
Berechnete Werte: MINCELL ist der niedrigste empfangene CELL-Wert. ALLCELL ist die Summe aller CELL-Werte. Entladung [Discharge] ist die gesamte Batterieentladung in mAh.
10.18. Protokoll: *Skyartec¶
Das Skyartec Protokoll wird zur Steuerung von Skyartec™ Empfängern und Modellen verwendet. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das Skyartec Protokoll unterstützt bis zu 7 Kanäle und kein automatisches Binden. Wenn Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird eine senderspezifische ID verwendet. Es ist erforderlich, jedes Modell vor der ersten Verwendung zu binden.
10.19. Protokoll: *Futaba S-FHSS¶
Das Futaba S-FHSS Protokoll wird zur Steuerung von Futaba™ Empfängern und Modellen verwendet. Ist wird auch von einigen XK Innovation Modellen eingesetzt, kompatible Empfänger von Drittherstellern sind erhältlich. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das S-FHSS Protokoll unterstützt bis zu 8 Kanäle und kein automatisches Binden. Wenn Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird eine senderspezifische ID verwendet. Es ist erforderlich, jedes Modell vor der ersten Verwendung zu binden.
Die normale Futaba Kanalordnung ist: Querruder, Höhenruder, Gas, Seitenruder, Fahrwerk, Pitch, Aux1 und Aux2. Somit ist es zur Steuerung von Collective Pitch (CP) Helikoptern geeignet.
Die Protokollauflösung beträgt 1024 Schritte (10 bits) von denen tatsächlich eine kleinerer Bereich verwendet wird (Daten aus der Nachkonstruktion mit Hilfe von Dritthersteller Geräten). Die zeitliche Auflösung beträgt 6,8 ms. Telemetrie wird nicht unterstützt.
10.20. Protokoll: *Corona¶
Das Corona-Protokoll unterstütz Corona V1 und V2-Empfänger sowie Flydream V3-Empfänger. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Alle Protokolle unterstützen bis zu 8 Kanäle. Die Kanalreihenfolge ist AETR. Es werden keine Telemetriedaten übertragen.
Die folgenden Protokolloptionen sind verfügbar.
Format: Protokollauswahl. Verwenden Sie V1 und V2 mit Corona-Empfängern und FDV3 für Flydream V3.
Freq-fine: Einstellung des Frequenzversatz. Werte zwischen -127 und 127. Wird verwendet, um Unterschiede zwischen verschiedenen CC2500-Modulen auszugleichen. Meist ist ein Versatz von 0 oder -41 erforderlich, jedoch sollte der gesamte Bereich geprüft werden, wenn Probleme mit der Bindung oder der Reichweite bestehen. Standardwert ist 0.
10.21. Protocol: *Hitec¶
The Hitec protocol supports Optima and Minima receivers. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
The protocol supports up to 9 channels. Default channel order is AETR. Telemetry is supported using the Frsky telemetry layout. The following values are supported: VOLT1, VOLT2, CURRENT, TEMP1, TEMP2, FUEL, RPM, LRSSI, LQI, and GPS (latitude, longitude, altitude, speed, heading). Receiver RSSI is not available in this protocol.
Die folgenden Protokolloptionen sind verfügbar.
Format: Receiver selection for Optima or Minima.
Freq-fine: Einstellung des Frequenzversatz. Werte zwischen -127 und 127. Wird verwendet, um Unterschiede zwischen verschiedenen CC2500-Modulen auszugleichen. Meist ist ein Versatz von 0 oder -41 erforderlich, jedoch sollte der gesamte Bereich geprüft werden, wenn Probleme mit der Bindung oder der Reichweite bestehen. Standardwert ist 0.
10.22. Protokoll: *V202¶
Das V202 Protokoll unterstützt WLToys V202 Quadrokopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das V202 Protokoll unterstützt bis zu 12 Kanäle und kein automatisches Binden. Wenn Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird eine senderspezifische ID verwendet. Es ist erforderlich, jedes Modell vor der ersten Verwendung zu binden.
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder. Weitere Kanäle werden zur Steuerung von Sonderfunktionen benutzt:
- Kanal 5 steuert die Blinkgeschwindigkeit
- Kanal 6 aktiviert den Überschlag [flip] Modus
- Kanal 7 macht Einzelbildaufnahmen
- Kanal 8 schaltet Video ein/aus
- Kanal 9 schaltet Headless Mode ein/aus
- Kanal 10 aktiviert die X-Achsen-Kalibration
- Kanal 11 aktiviert die Y-Achsen-Kalibration
Bei Auswahl des JXD-506 Formats werden die Kanäle 10-12 wir folgt verwendet:
- Kanal 10 start/stopp
- Kanal 11 Notstopp
- Kanal 12 Gimbal-Steuerung
Vor Bindung mit Modellen die mit diesem Format arbeiten, muss der Gashebel in Mittelstellung gebracht werden.
10.23. Protokoll: *SLT¶
Das SLT Protokoll wird zur Steuerung von TacticSLT/Anylink Empfängern verwendet. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das SLT Protokoll unterstützt bis zu 6 Kanäle und unterstützt nur automatisches Binden. Eine feste ID kann verwendet werden, verhindert jedoch nicht die automatische Bindung beim Einschalten.
10.24. Protokoll: *HiSky¶
Das HiSky Protokoll wird zur Steuerung von HiSky Modellen sowie WLToys V922 und V955-Modellen verwendet. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das HiSky Protokoll unterstützt bis zu 7 Kanäle und kein automatisches Binden. Wenn Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird eine senderspezifische ID verwendet. Es ist erforderlich, jedes Modell vor der ersten Verwendung zu binden.
10.25. Protokoll: *YD717¶
Das YD717 Protokoll unterstützt den YD717 und Skybotz UFO Mini Quadrokopter sowie zahlreiche weitere Modelle von Sky Walker, XinXun, Ni Hui und Syma über Protokolloptionen. Details können der Tabelle über unterstützte Modelle (https://www.deviationtx.com/wiki/supported_models) entnommen werden. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das YD717 Protokoll unterstützt 9 Kanäle und unterstützt nur automatisches Binden. Das Protokoll bleibt im Bindemodus bis dieser erfolgreich abgeschlossen wurde.
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder.
Der fünfte Kanal aktiviert die Auto-Flip Funktion wenn der Wert größer als null ist. Zur Aktivierung von Auto-Flips nach links und rechts muss die Skalierung des Querruderkanals mindestens 87 betragen. Gleiches gilt für den Höhenruderkanal und Auto-Flips nach vorne und hinten. Wenn Auto-Flip aktiviert ist wird der Flip durch vollständige Auslenkung in die gewünschte Richtung initiiert. Der YD717 benötigt einen Abstand von mindestens vier Sekunden zwischen zwei Auto-Flips.
Der sechste Kanal aktiviert Lichter wenn er größer als null ist.
Der siebte Kanal aktiviert eine EInzelbildaufnahme beim Wechsel von negativen zu positiven Werten.
Der achte Kanal startet/stoppt die Videoaufzeichnung bei jedem Wechsel von negativ nach positiv.
Der neunte Kanal ist dem letzten Protokollfunktion zugeordnet. Dies kann beispielsweise bei manchen Modellen der Headless Mode sein.
10.26. Protokoll: *SymaX¶
Dieses Protokoll wird auf folgenden Syma Modellen verwendet: X5C-1, X11, X11C, X12, neuer X4 und neuer X6. Eine Variante unterstützt den originalen X5C und den X2 über eine Protokolloption. (Syma X3, alter X4 und alter X6 werden über die SymaX4 Option im Protokoll YD717 unterstützt). Details können der Tabelle über unterstützte Modelle (https://www.deviationtx.com/wiki/supported_models) entnommen werden. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das SymaX Protokoll unterstützt 9 Kanäle und unterstützt nur automatisches Binden.
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder.
Der fünfte Kanal ist nicht belegt.
Der sechste Kanal aktiviert die Auto-Flip Funktion wenn er größer als null ist.
Der siebte Kanal aktiviert eine EInzelbildaufnahme beim Wechsel von negativen zu positiven Werten.
Der achte Kanal startet/stoppt die Videoaufzeichnung bei jedem Wechsel von negativ nach positiv.
Der neunte Kanal aktiviert den Headless Mode wenn er positiv ist.
10.27. Protokoll: *Hontai¶
Dieses Protokoll wird von den Hondas Modellen F801 und F803 verwendet.
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the „plus“ version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder. Weitere Kanäle werden zur Steuerung von Sonderfunktionen benutzt:
- Der fünfte Kanal ist nicht belegt.
- Kanal 6 aktiviert den Überschlag [flip] Modus
- Der siebte Kanal aktiviert eine EInzelbildaufnahme beim Wechsel von negativen zu positiven Werten.
- Der achte Kanal startet/stoppt die Videoaufzeichnung bei jedem Wechsel von negativ nach positiv.
- Kanal 9 schaltet Headless Mode ein/aus
- Kanal 10 aktiviert die Return-to-home-Funktion
- Kanal 11 aktiviert die Kalibration
10.28. Protokoll: *Bayang¶
Dieses Protokoll wird von BayangToys X6, X7, X8, X9, X16, Boldclash B03, JJRC/Eachine E011, H8, H9D v2, H10, Floureon H101, JJRC JJ850, JFH H601, und H606 (regular format) verwendet.
Dieses Protokoll wird von BayangToys X16 mit altitude hold (X16-AH format) verwendet.
Dieses Protokoll wird von IRDRONE Ghost X5 (IRDRONE format) verwendet.
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the „plus“ version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder. Weitere Kanäle werden zur Steuerung von Sonderfunktionen benutzt:
- Kanal 5 aktiviert die LEDs oder den invertierten Flug (Floureon H101)
- Kanal 6 aktiviert den Überschlag [flip] Modus
- Kanal 7 aktiviert eine EInzelbildaufnahme beim Wechsel von negativen zu positiven Werten.
- Kanal 8 startet/stoppt die Videoaufzeichnung bei jedem Wechsel von negativ nach positiv.
- Kanal 9 schaltet Headless Mode ein/aus
- Kanal 10 aktiviert die Return-to-home-Funktion
- Kanal 11 aktiviert den Start-/Landemodus
- Kanal 12 aktiviert den Not-Stopp
- Channel 13 analog aux channel #1
- Channel 14 analog aux channel #2
NOTE: Channels 13 and 14 are only active when using NFE Silverware firmware (and some other Silverware forks). Two otherwise static bytes in the protocol overridden to add two ‚analog‘ (non-binary) auxiliary channels. The „Analog Aux“ Bayang protocol option must be enabled on the TX and the Silverware firmware must have the Analog Aux feature enabled. Mismatches betwen TX and RX settings will prevent binding.
10.29. Protokoll: *FY326¶
Dieses Protokoll wird vom FY326 Modellen mit roter Platine verwendet.
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the „plus“ version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder. Weitere Kanäle werden zur Steuerung von Sonderfunktionen benutzt:
- Der fünfte Kanal ist nicht belegt.
- Kanal 6 aktiviert den Überschlag [flip] Modus
- Kanal 7 ist nicht belegt
- Kanal 8 ist nicht belegt
- Kanal 9 schaltet Headless Mode ein/aus
- Kanal 10 aktiviert die Return-to-home-Funktion
- Kanal 11 aktiviert die Kalibration
10.30. Protokoll: *CFlie¶
Das Clie Protokoll wird für den CrazyFlie Nano Quad verwendet. Es wurde nicht mit anderen Modellen getestet. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the „plus“ version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das HiSky Protokoll unterstützt bis zu 4 Kanäle und kein automatisches Binden. Wenn Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird eine senderspezifische ID verwendet. Es ist erforderlich, jedes Modell vor der ersten Verwendung zu binden.
10.31. Protokoll: *H377¶
Das H377 Protokoll wird für den NiHui H377 6-Kanal Helikopter verwendet. Es wurde nicht mit anderen Modellen getestet. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the „plus“ version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das H377 Protokoll unterstützt bis zu 7 Kanäle und kein automatisches Binden. Wenn Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird eine senderspezifische ID verwendet. Es ist erforderlich, jedes Modell vor der ersten Verwendung zu binden.
10.32. Protokoll: *HM830¶
Das HM830 Protokoll wird für das HM830 A4-Faltpapier Flugzeug verwendet. Es wurde nicht mit anderen Modellen getestet. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the „plus“ version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das HM830 Protokoll unterstützt 5 Kanäle und unterstützt nur automatisches Binden. Das Protokoll bleibt im Bindemodus bis dieser erfolgreich abgeschlossen wurde.
10.33. Protokoll: *KN¶
Das KN Protokoll wird für WLToys V930, V931, V966, V977 und V988 (WLToys Format) sowie Feilen FX067C, FX070C und FX071C (Feilen Format) Helikopter verwendet. Es wurde nicht mit anderen Modellen getestet. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the „plus“ version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das KN Protokoll unterstützt bis zu 11 Kanäle und kein automatisches Binden. Wenn Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird eine senderspezifische ID verwendet. Es ist erforderlich, jedes Modell vor der ersten Verwendung zu binden.
Kanäle 1-4 entsprechen Gas, Querruder, Höhenruder und Seitenruder. Kanal 5 aktiviert die eingebaute Dual-Rate des Modells. Kanal 6 aktiviert Gas aus. Kanal 7 aktiviert Idle Up (nur WLToys V931, V966 und V977). Kanal 8 wechselt zwischen 6G (Standard) und 3G Stabilisierung. Kanal 9-11 sind Trimmkanäle für Gas/Pitch, Höhenruder und Seitenruder.
10.34. Protokoll: *ESky150¶
Das ESky150 Protokoll wird für kleinere ESky Modelle seit 2014 (150, 300, 150X) verwendet. Es wurde nicht mit anderen Modellen getestet. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the „plus“ version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das ESky150 Protokoll unterstützt bis zu 7 Kanäle und kein automatisches Binden. Wenn Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird eine senderspezifische ID verwendet. Es ist erforderlich, jedes Modell vor der ersten Verwendung zu binden.
Kanal 1-4 entsprechen Gas, Querruder, Höhenruder und Seitenruder. Kanal 5 ist der Flugmodus (1 bit Schalter mit zwei Zuständen). Kanal 6 wird auf keinem der getesteten Modelle verwendet. Kanal 7 ist ein 2 bit Schalter (4 Zustände).
Bei 4-Kanal Modellen bitte sicherstellen, das der Sender auch nur für 4 Kanäle konfigurier wurde, da ansonsten abenteuerliche Gaswerte gesendet werden können.
10.35. Protokoll: *Esky¶
Muss noch vervollständigt werden. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das Esky Protokoll unterstützt bis zu 6 Kanäle und kein automatisches Binden. Wenn Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird eine senderspezifische ID verwendet. Es ist erforderlich, jedes Modell vor der ersten Verwendung zu binden.
10.36. Protokoll: *BlueFly¶
Das BlueFly Protokoll wird für den Blue-Fly HP100 verwendet. Es wurde nicht mit anderen Modellen getestet. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the „plus“ version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das BlueFly Protokoll unterstützt bis zu 6 Kanäle und kein automatisches Binden. Wenn Feste ID [Fixed ID] auf ‚Keine‘ [None] gesetzt ist, wird eine senderspezifische ID verwendet. Es ist erforderlich, jedes Modell vor der ersten Verwendung zu binden.
10.37. Protokoll: *CX10¶
Die Format CX10 Protokolloption unterstützt den Cheerson CX10 Quadrokopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das CX10 Protokoll unterstützt 9 Kanäle und unterstützt nur automatisches Binden. Das Protokoll bleibt im Bindemodus bis dieser erfolgreich abgeschlossen wurde. Die ersten vier Kanäle sind Querruder, Höhenruder, Gas und Seitenruder.
Kanal 5 ist die Rate, außer beim CX-10A, wo hiermit der Headless Mode aktiviert wird.
Kanal 6 aktiviert den Überschlag [flip] Modus
Das DM007 Format unterstützt zusätzlich Kanal 7 für Einzelbildaufnahmen, Kanal 8 für Video ein/aus und Kanal 9 für Headless Mode.
Das Protokoll besitzt Formatoptionen für Blue-A, Green, DM007, Q282, JC3015-1, JC3015-2, MK33041 und Q242 Quadrokopter.
10.38. Protokoll: *CG023¶
Das CG023 Protokoll wird für Eachine CG023 und 3D X4 Quadrokopter verwendet. Es wurde nicht mit anderen Modellen getestet. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the „plus“ version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das CG023 Protokoll unterstützt 9 Kanäle und unterstützt nur automatisches Binden.
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder.
Kanal 5 steuert die LEDs
Kanal 6 aktiviert den Überschlag [flip] Modus
Kanal 7 macht Einzelbildaufnahmen
Kanal 8 schaltet Video ein/aus
Kanal 9 schaltet Headless Mode ein/aus
Das Protokoll besitzt eine Formatoptionen für den YD829 Quadrokopter.
10.39. Protokoll: *H8_3D¶
Das H8_3D Protokoll wird für Eachine H8 3D, JJRC H20 und H11D Quadrokopter verwendet. Es wurde nicht mit anderen Modellen getestet. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the „plus“ version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das H8_3D Protokoll unterstützt 11 Kanäle und unterstützt nur automatisches Binden.
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder.
Kanal 5 steuert die LEDs
Kanal 6 aktiviert den Überschlag [flip] Modus
Kanal 7 macht Einzelbildaufnahmen
Kanal 8 schaltet Video ein/aus
Kanal 9 schaltet Headless Mode ein/aus
Kanal 11 kontrolliert den Return-To-Home Modus
Kanal 11 kontrolliert das Kameragimbal am H11D und hat drei Positionen.
Beide Knüppel nach links unten aktiviert die Kalibration des Beschleunigungsmessers am H8 3D und die Headless Kaliration am H20.
Beide Knüppel nach rechts unten aktiviert die Kalibration des Beschleunigungsmessers am H20 und H11D.
10.40. Protokoll: *MJXq¶
Das MJXq Protokoll unterstützt MJX Quadrokopter. Es besitzt Formatoptionen für Weilihua WLH08, Eachine E010 und JJRC H26D / H26WH. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Das MJXq Protokoll unterstützt 12 Kanäle und unterstützt nur automatisches Binden.
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder.
Kanal 5 kontrolliert LEDs oder die Aktivierung, wenn das H26WH Format gewählt wurde.
Kanal 6 aktiviert den Überschlag [flip] Modus
Kanal 7 macht Einzelbildaufnahmen
Kanal 8 schaltet Video ein/aus
Kanal 9 schaltet Headless Mode ein/aus
Kanal 10 kontrolliert den Return-To-Home Modus
Kanal 11 kontrolliert Auto-Flip (X600 & X800 Format) oder Kameraschwenk.
Kanal 12 steuert Kameraneigung
10.41. Protocol: *Bugs3Mini¶
The Bugs3Mini protocol is used to control MJX Bugs3 Mini and Bugs 3H aircraft. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
To bind first choose the Bugs3Mini protocol and click Bind. Then apply power to the aircraft. The bind dialog will disappear if bind is successful.
Die folgenden Kanäle werden für Sonderfunktionen verwendet. Eine Kanalwert größer als null aktiviert die Funktion.
- Aktivieren wird von Kanal 5 gesteuert
- Lichter werden von Kanal 6 gesteuert
- Flip wird von Kanal 7 gesteuert
- Kamera wird von Kanal 8 gesteuert
- Video wird von Kanal 9 gesteuert
- Angle/Acro-Modus wird von Kanal 10 gesteuert (>0 ist Angle-Modus)
Telemetry is supported for RSSI and voltage alarm. It uses the Frsky telemetry display with signal strength reported in the RSSI field and battery voltage in VOLT1. The Bugs3 Mini receiver only reports good/warning/low voltage. This is translated to VOLT1 values of 8.40V for good, 7.10V for warning and 6.40V for low voltage.
10.42. Protocol: *E012¶
The E012 protocol is used to control the Eachine E012 quadcopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The E012 protocol supports 10 channels and only supports auto-binding.
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder.
- Flip wird von Kanal 6 gesteuert
- Headless wird von Kanal 9 gesteuert
- RTH wird von Kanal 10 gesteuert
10.43. Protocol: *E015¶
The E015 protocol is used to control the Eachine E015 quad/car/boat. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The E015 protocol supports 10 channels and only supports auto-binding.
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder.
- Aktivieren wird von Kanal 5 gesteuert
- Lichter werden von Kanal 6 gesteuert
- Flip wird von Kanal 7 gesteuert
- Headless wird von Kanal 9 gesteuert
- RTH wird von Kanal 10 gesteuert
10.44. Protocol: *NCC1701¶
The NCC1701 protocol is used to control the Air Hog Star Strek NCC-1701 quadcopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The NCC1701 protocol supports 5 channels and only supports auto binding.
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder.
- Warp is controlled by Channel 5
10.45. Protocol: *V911S¶
The V911S protocol is used to control the WL Toys V911-S helicopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The V911S protocol supports 5 channels. The receiver must be bound manually one-time using the ‘Bind’ button, after which it should stay bound.
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder.
- Calibration is controlled by Channel 5
10.46. Protocol: *GD00X¶
The GD00X protocol is used to control the C17 C-17 Transport and GD006 Diamond DA62 fixed wings. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The GD00X protocol supports 5 channels and only supports auto binding.
The first four channels are Aileron, Elevator, Throttle and Rudder. Only throttle and aileron channels are used by the model.
- Lichter werden von Kanal 5 gesteuert
10.47. Protocol: *LOLI¶
The LOLI protocol is used to control popular DIY nRF24L01 receivers. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The LOLI protocol supports 8 channels. The receiver must be bound manually one-time using the ‘Bind’ button, after which it should stay bound.
Receiver output modes are configurable via protocol options.
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder.
Failsafe settings are supported.
Telemtrie wird unterstützt.
10.48. Protocol: *E016H¶
The E016H protocol is used to control the Eachine E016H quadcopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The E016H protocol supports 8 channels and only supports auto binding.
Die ersten 4 Kanäle entsprechen Querruder, Höhenruder, Gas und Seitenruder.
- Flips are controlled by Channel 5
- Headless mode is controlled by Channel 6
- RTH mode (One Key Return) is controlled by Channel 7
- Emergency stop is controlled by Channel 8
10.49. Protokoll: PPM¶
Das PPM Protokoll wird verwendet um PPM über den DSC-Anschluss auszugeben. Alle Funkübertragungen werden deaktiviert. PPM ist nützlich zur Steuerung von Simulatoren oder um an den Traineranschluss anderer Sender zu verwenden. Die Feste ID hat keinen Effekt und es gibt keine Bindung.
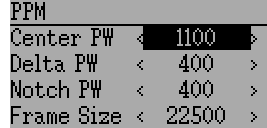
Konfigurierbare Optionen auf der PPM Seite:
- Mitte PW [Center PW]: Definiert die Zeit (in μs) des Pulses die der Schülersender überträgt um die Servomitte abzubilden. Falls dieser Wert nicht zum Schülersender passt, werden die Servos nicht zentriert.
- Delta PW: Definiert die Breite des Pulses (gemessen von der Mitte) die der Schülersender überträgt um den maximalen Servoausschlag zu definieren. Falls dieser Wert nicht korrekt ist, werden die Servos nicht den vollen Weg erreichen (oder werden sich zu viel bewegen).
- Notch PW: Definiert die Verzögerung zwischen den Kanälen.
- Frame Size: Definiert die Gesamtzeit in der alle Kanäle übertragen werden.
- Polarity: Defines the polarity of the signal, Normal is active low.
Deviation erkennt nicht automatisch, ob eine Kabel in die DSC-Buchse eingesteckt wurde. Um Deviation mit einem Simulator (wie z.B. Phoenix) zu verwenden, erstellen Sie eine neue Modellkonfiguration, bezeichnen Sie sinnvoll und setzen PPM als Protokoll. Mittels Re-Init oder Ein- und Ausschalten des Senders wird PPM aktiviert.
10.50. Protokoll: USBHID¶
Das USBHID Protokoll verwandelt Ihren Sender in einen USB Joystick. Durch Verbinden des Senders mit einem USB-Kabel an einen PC wird der Sender vom Computer als Joystick erkannt. Dies kann für alle Simulatoren verwendet werden, die über einen Joystick gesteuert werden können. Meist muss zunächst über die Systemeinstellungen Ihres Betriebssystems eine Kaliration durchgeführt werden.
10.51. Protokoll: SBUS¶
Das SBUS-Protokoll sendet serielle Daten auf dem DSC/Trainer-Port des Senders (Spitze des Klinkensteckers). Der Ring der Steckers führt Masse. Auf dem T8SG PLUS Sender sind die seriellen Daten auch auf dem obersten Pin des JR-Schachts verfügbar. Die seriellen Daten sind nicht invertiert, sodass für manche SBUS-Geräte ein zusätzlicher Adapter erforderlich ist. Bis zu 16 Kanäle werden unterstützt. Die Datenrate beträgt 100 kbps. Das Format ist 8 Datenbits, Parität gerade, zwei Stopp-Bits.
10.52. Protokoll: CRSF (Crossfire)¶
Das CRSF-Protokoll sendet serielle Daten des Crossfire-Protokolls auf dem DSC-Port des Senders (Spitze des Klinkensteckers). Der Ring des Steckers führt Masse. Auf dem T8SG PLUS Sender sind die seriellen Daten auch auf dem obersten Pin des JR-Schachts verfügbar. Um Telemtrie zu aktivieren, muss der serielle Ausgang mit dem seriellen Eingang verbunden werden. Verbinden Sie hierfür die Spitze des DSC-Steckers mit Ring1 des Steckers. Im T8SG-Modulschacht müssen der oberste und der unterste Pin verbunden werden. Bis zu 16 Kanäle werden unterstützt.
Die CRSF Bindungs- und Konfigurationsmöglichkeiten werden noch nicht unterstützt. Verwenden Sie einen Computer um ihr Crossfire-Modul mit einem Empfänger zu Verbindung, bevor Sie es in Deviation verwenden wollen.
Telemetrie is auf den Sendern mit begrenztem Speicher nicht verfügbar (7e, F4, F12).
Telemetrie Testseite
Die folgende Tabelle zeigt das Layout der Telemetrie Testseite.
| Devo10 | ||
|---|---|---|
| RX | TX | Bat |
| RxRSSI | TxRSSI | VBATT |
| RSSI2 | TxPOWER | CURRENT |
| RxSNR | TxSNR | CAPACITY |
| RxQUAL | TxQUAL | FMODE |
| PITCH | ROLL | YAW |
| RFMODE | ||
10.53. Protocol: PXX¶
The PXX protocol is an Frsky serial interface to their transmitter modules. Primarily useful for R9M and XJT modules in the JR bay of the T8SG Plus, but protocol is available on the serial port of other transmitters.
Up to 16 channels are supported. Telemetry (S.Port) is supported in the Frsky format for most transmitters. Due to memory constraints telemetry is not available in modular builds. Range check operation is supported. Module power setting is displayed as FCC/EU (e.g. 100/25mW).
Fixed ID is supported to link the transmitter with specific receivers. The Fixed ID corresponds to the receiver number in OpenTX to make sharing easier. Values 0 to 63 are valid. Fixed IDs above 63 are truncated to the valid range.
Die folgenden Protokolloptionen sind verfügbar.
Failsafe: If the channel failsafe (in mixer channel config) is set this value is sent to the receiver every 9 seconds. The receiver will use these values in failsafe mode unless the protocol option is set to RX. For channels with failsafe set to off, the default Failsafe protocol option „Hold“ commands the receiver to hold the last received channel values when the receiver enters failsafe mode. The „NoPulse“ setting causes the receiver to not send any signal on PPM outputs (Testing on X8R showed SBUS values went to minimum, but SBUS behavior is not specified by the protocol). The „RX“ setting prevents Deviation from sending failsafe settings so the receiver will use whatever failsafe values have been stored in the receiver.
Country: Set the country to match the firmware in the receiver. Options are US, JP, EU.
Rx PWM out: Choose whether PWM outputs of receiver are channels 1-8 or 9-16.
Rx Telem: Turn receiver telemetry on or off.
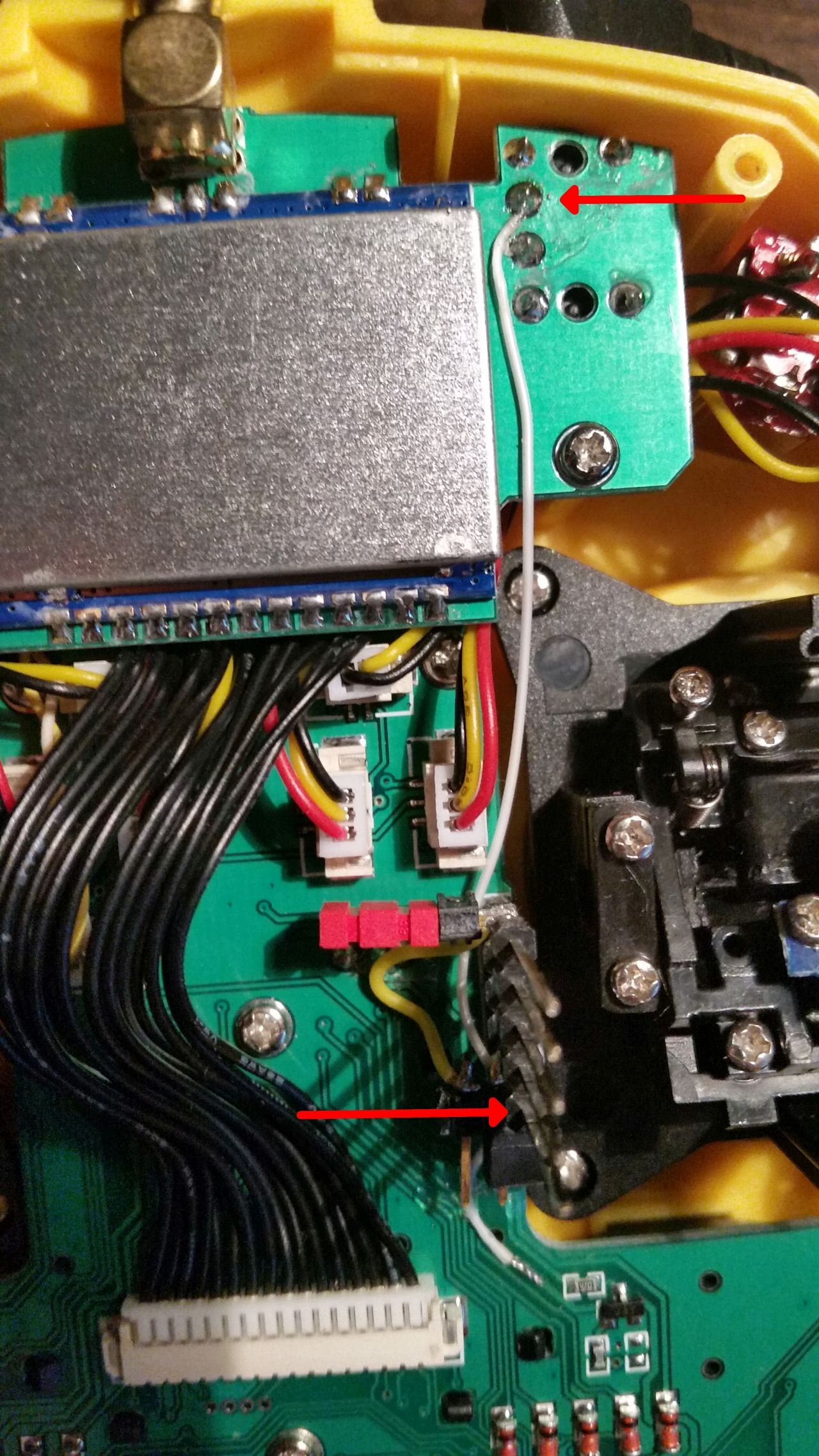
For transmitters without JR module the PXX signal is available on the serial port output. This is normally the trainer jack except for the Devo12. Use a stereo plug. Tip will be the PXX output, and ring is the s.port input. Sleeve is ground.
The T8SG V2 Plus requires a hardware modification to receive telemetry from a module in the JR bay. The trainer port ring must be connected to the bottom JR pin (see picture).