9. 模型设置¶
模型设置提供了编辑模型配置,警告,数据记录和屏幕配置。可以通过按ENT或者选择主菜单然后选择模型设置进入。
根据在:ref:`model-setup`中选择的混控的界面类型不同,模型菜单也会有所不通。
高级混控:ref:`mixer-adv`提供所有标准混控的功能,同时提供许多额外的功能和配置。
| 高级模型设置 | 标准模型设置 | ||
|
|
注意:在所有遥控器上,高级混控设置界面都是缺省界面。
9.1. 模型设置¶
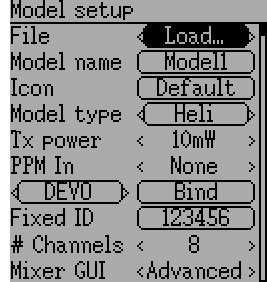
该模型页面提供了多个可供修改的配置选项。
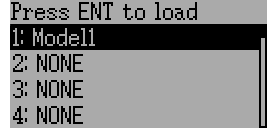
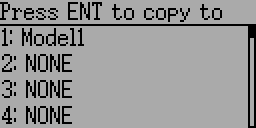
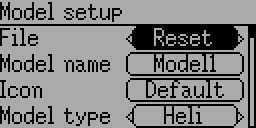
文件:文件选择框,可以加载一个新的模型,复制现有的模型到新的位置, 恢复当前模式为默认(所有配置将丢失),和加载模板(见:ref:predefined-model-templates)。注 意,更改模型可能会导致安全消息显示(见:ref:`safety-system)。
|
|

混控界面:确认图形用户界面(GUI),以用于该模型。Deviation 默认“高级模 式”界面。“标准模式”界面仅可用于直升机模型,更接近于原版固件的界面。
标准模式 GUI 是专为有副翼的直升机设计的。它包含那些其他飞机不需要 的特殊功能,并可能缺少适合控制其他飞机所需的功能。一个无副翼直升机可能 不适合使用标准模式 GUI,它并不需要这些特殊的功能,而且可能需要这些缺少 的功能。我们强烈建议除带副翼的直升机之外的所有的飞机使用高级模式。
注意:如果你从高级模式切换到标准模式,所有数据都可能丢失。如果你从标准模式切换到高级模式,你的数据将被保留。
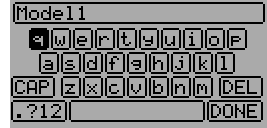
模型名称:设定模型的名称。使用左,右,上,下键然后使用 ENT键选择每个 字符。
**图标**选择模型的图标。可以安装额外的模型图标(见:ref:usb-file-system)。
**模型类型**设置机种,可供选择的有,直升机,固定翼和多轴。直升机模型可以 通过点击模型类型进入额外的配置页。对于十字盘模式的选项请见十字盘配置。
如果模型类型从直升机切换到其他,这将自动更改为高级混控模式 GUI,因 为标准模式 GUI 只支持直升机。
Transmitter Power: Specify the radio output power (when applicable). The valid power settings depend on the radio used by the selected protocol.
| CYRF6936, CC2500, MULTIMOD | 100µW, 300µW, 1mW, 3mW, 10mW, 30mW, 100mW, 150mW |
| A7105 | 100µW, 300µW, 1mW, 3mW, 10mW, 30mW, 100mW |
| NRF24L01 | 1mW, 6mW, 25mW, 100mW |
| R9M (PXX protocol) | 10/25mW, 100/25mW, 500/500, Auto/200 (FCC/EU) |
When changing the protocol in a model the power level will be set to the maximum for the radio used by the new protocol. Best to choose protocol first, then set Tx power.
注意:原生的Devo7e的功率是7mW。由于软件限制,150mW会被错误的显示。
**PPM In**教练口信号输入,可以用来连接 头追之类硬件的 PPM 信号输入,也可以接入教练主机(教练遥控器信号)。有的选项是通道,Stick和协议。
Stick 和通道 用于教练模式设置,(具体设置方法可以在 setting-up-a-buddy-box`找到)Extend 模式用于 FPV 或外部输入(比如头追),文档参见:ref:`setting-up-fpv
协议: 设置接收机的协议类型,具体可以参照:ref:protocols。注意协议的改变会关闭现在的的协议,这会影响任何现在激活的模型。可以使用对频或者重新初始化的方法来启动新选中的协议。
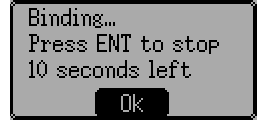
对频/初始化:通过对频和固定 ID 的设置,遥控器可以在开机时自动与模型对 频,或者可能需要手动对频一次。详见协议查找更具体的解释。如果协议不支持 对频,该按钮将显示“初始化”,这样不需要重启遥控器就可以切换协议。
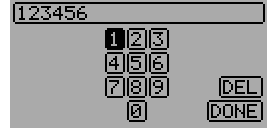
固定 ID:固定 ID 设置一个唯一的代码,以确保遥控器将对频到特定模型。这是 很有用的,以确保遥控器不会意外对频到错误的模型。
通道数:设置传输的通道数量(最大通道数取决于所选择的协议)。
9.1.1. 内置模板¶
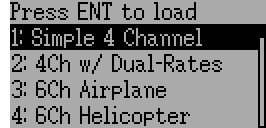
Deviation 固件支持用户自定义预定义模型模板。通过从模型设置页面选择文 件选择框内的“模板...”。
其他模板可通过 USB添加到“template”目录下。模板不能完全取代你的现 有模型, 而只是一部分. 当前支持的模板会改变混控和微调定义,但不会影响显示布局。
9.2. 混控¶
“高级模式” GUI 包含 Deviation 固件的全部功能,但它不同于任何商业遥 控器的设置。Deviation 还为喜欢它的人提供了更传统的设置界面(请参阅标准 菜单项)。使用高级菜单,每个输出通道由一系列一个或多个混控器组成,每个 混控器由单个输入,一个激活开关以及一个修改混控器输出的功能/曲线组成。 这是一个非常强大的功能,但它需要学习完全不同的方法来建立模型。为了帮助 快速设置,有几个预定义的配置可用(请参阅:ref:predefined-model-templates),但要学习修改 和配置模型,请仔细阅读整个部分。
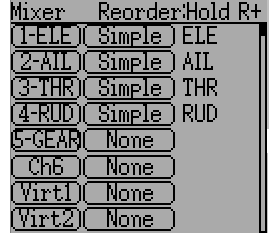
混控页面控制如何把输入(摇杆/开关)分配给输出通道。混控页面从主菜 单进入。
可用的通道数量取决于模型设置( 模型设置)部分中选择的通道数 量。此外,还有 10 个虚拟通道可用作复杂设置的中间步骤。
9.2.2. 通道设置¶
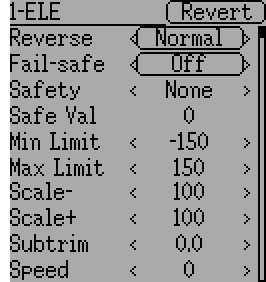
通道设置提供了设置最终的通道输出的功能。例如可以在这里设置通道反向 和失控保护安全值。此外,还包括设置舵量,比例,微调,以及一个安全开关 (其可以用来确保模型开始工作时电机不会自己旋转)。
该页面更改通道输出将立即生效。按“取消”将把值恢复到上次保存 的状态。
反向:反转舵机旋转方向
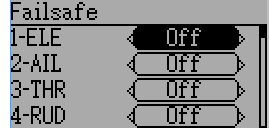
失控保护:设置遥控器失去信号时接收器应使用的值。它的范围是-125 和 125之间或者关闭。并非所有的接收器支持此功能。
熄火开关:设置一个开关,当打开时将覆盖所有混控,使通道强制输出“熄火值”。
熄火值:如果设置了了熄火开关,熄火值才可以设定。熄火值的可调范围是-150到 150 之间的任意值。
最小舵量/最大舵量:这些值定义遥控器发送到接收器的最小值和最大值(在所 有比例,微调和混控后应用)。如果最终的值在最小/最大范围之外,它将被设置 为最小或最大值。默认值最小舵量是-150,最大舵量是+150。最小舵量的设置范 围是-250 到 0,最大舵量的范围是 0 到 250。
比例-/比例+:这些值定义了通道的行程。允许的范围是 1 和 250 之间。
微调:调整舵机中位。可用范围从-50.0 到+50.0,以 0.1 为增量。
舵机速率:调整最大的舵机速度,设置为 0 时被禁用(最快速度),范围在 1(最慢)- 250(最快)之间,舵机速度定义为 100 毫秒每度(假设舵机为 120 度)。
例如:60 的值 将给出每 100 毫秒 60 度的速度,这相当于从中位到最大需要 100 毫秒。大多 数舵机额定速度为 60 度/ 100 毫秒,这样的话,设置速度> 60 将对大多数舵 机没有任何影响。设置值为 30 应大约比普通舵机慢一半。
9.2.3. 虚拟通道设置¶
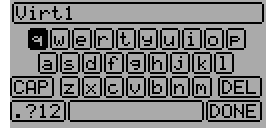
If you press ENT on a virtual channel a keyboard screen is shown where you may edit the default name. You can use L/R/UP/DN buttons followed by 'ENT' to select.
9.2.4. 一段式混控¶
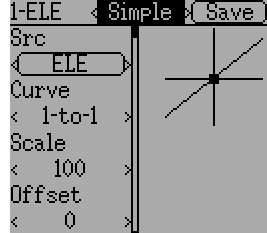
一段式混控类型是设置通道最简单的方式。它允许定义一个主输入端(摇 杆,开关,或其它通道),以及应用曲线或函数来输入。结果也可以缩放或具有 备用的零偏移量。 您不能使用切换键或开关来激活或取消激活此设置
长按“ENT”将更新当前的混控设置,以便在遥控器上进行测试。
输入:混控输入源。
曲线: 该函数应用于输入以生成输出。 有关更多信息,请参见可用曲线部分。 根据曲线类型,按下曲线可能会显示曲线编辑器(请参阅曲线编辑)。
比例:在曲线之后应用的乘法标量,用于控制输出范围。
偏移:在比例修改之后添加的附加偏移。
9.2.5. 三段式混控¶
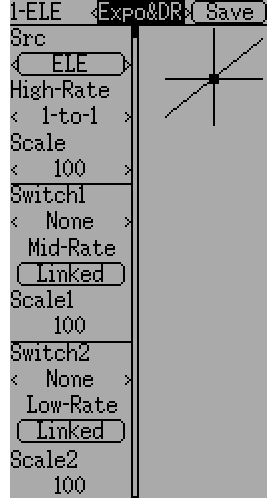
为开关 1 或者开关 2 设置一个值,当开关在相应挡位时激活相应部分。每个 部分可以设置一个 “关联”曲线(曲线和“普通飞行”曲线是一样的),在这种 情况下,仅比例可以被修改,或者可以具有独立的曲线定义。通过开关的“中 位”或“低位”控制关联和独立曲线之间切换。
长按“ENT”将更新当前的混控设置,以便在遥控器上进行测试。
输入:混控输入源。
曲线: 该函数应用于输入以生成输出。 有关更多信息,请参见可用曲线部分。 根据曲线类型,按下曲线可能会显示曲线编辑器(请参阅曲线编辑)。
开关 1 or 开关 2: 指定一个开关用来启用设置。
比例:在曲线之后应用的乘法标量,用于控制输出范围。
9.2.6. 多段式混控¶
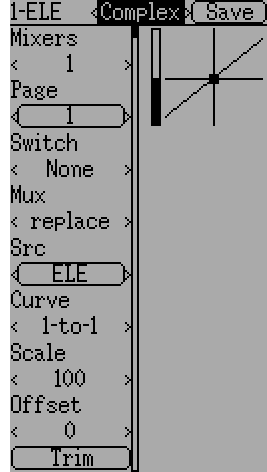
多段式混控类型拥有混控系统的全部功能。对于给定的通道,可以使用任意 数量的混控器来影响最终效果。根据指定的开关是否启用来控制每个混控器,并 且可以替换,添加或乘以该通道之前的混控器。使用该系统应该可以将输出通道 定义为任意数量输入的组合。
长按“ENT”将更新当前的混控设置,以便在遥控器上进行测试。
多段式混控页面有如下选择:
混控:指定当前通道的混控器数量。如果增加数量,则在最后一个现有页面之后添加新的混控器。
页面:指定需要编辑的混控器页面。按下ENT键可以进入到排序页面。
开关:指定一个开关来启用或者关闭混控。
作用:定义当前的混控器如何应用于此通道先前定义的混控器。选项包括:
- 替换:如果启用这个混控器,所有之前的混控都会被忽略。
- 附加:将此混控器的值添加到之前的混控器。
- 叠加:将该混控器的值与之前的混控器的值相乘。请注意,这些值是百分比,所以乘以 50 实际上是乘以 0.5。
- 最大:输出当前混控器和之前混控器比较最大的一个值。
- 最小:输出当前混控器和之前混控器比较最小的一个值。
- 延时:当与固定曲线一起使用时,延迟该混控器的输出。100的缩放表 示 5 秒延迟。 可以通过使用比例或偏移来改变。
输入:混控输入源。
曲线: 该函数应用于输入以生成输出。 有关更多信息,请参见可用曲线部分。 根据曲线类型,按下曲线可能会显示曲线编辑器(请参阅曲线编辑)。
比例:在曲线之后应用的乘法标量,用于控制输出范围。
注意,尽管比例值限制为 100%,如果设置补偿或者微调值是非零的偏移量,
偏移:在比例修改之后添加的附加偏移。
微调:微调选择的输入源应用到当前混控器。
混控器可以具有如下形式:
输出(x) =如果(开关) {输入 * 曲线 * 比例*+*偏移} 否则{0} + 微调
给定输出通道的混控器组合由作用类型定义:
对于“替换”作用:
Cx = 如果(开关 n) {Mn} 否则如果 (开关 n-1) {Mn-1} ...否则如果 (开关 0) {M0}对于“叠加”作用:
Cx =如果(开关n) {Mn}否则{1} * if (开关n-1) {Mn-1}否则{1} * ... *如果(开关 0) {M0} 否则 {1}对于“附加”作用:
Cx =如果(开关n) {Mn}否则{0} +如果(开关n-1) {Mn-1}否则{0} + ... +如果(开关0) {M0} 否则 {0}对于“最大”作用
Cx = 最大(如果 (开关 n) {Mn} 否则 {0},如果 (开关 n-1) {Mn-1}否则 {0}, ...,如果 (开关 0) {M0} 否则 {0})对于“最小”作用:
Cx = 最小(如果(开关 n) {Mn} 否则 {0}, 如果 (开关 n-1) {Mn-1}否则{0}, ...,如果 (开关 0) {M0} 否则 {0})
9.2.8. 混控重新排序¶
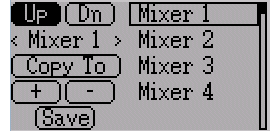
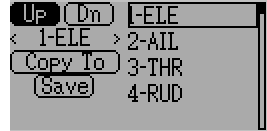
选择相应的混控,并使用上/下按钮来移动所选择的混控的顺序。需要注意 的是混控名称代表的是打开重新排序对话框时它的位置。如果对话框关闭并重新 打开,所有混控将被示为按顺序编号。
重新排序页面可以添加新的混控或删除现有的,分别使用“+”和“-”按 钮操作。混控也可以通过使用“复制到”功能复制到现有的混控(在这个过程 中将会覆盖它)。
9.2.9. 可用曲线¶
支持以下曲线功能:
- 45度曲线:输出等于输入(不可编辑)。
- 固定:无论输入如何,输出都是常量 (偏移量可编辑)。
- 最低/最高:如果输入小于指定值,则输出为-100,否则为100。
- 零/最大:如果输入小于指定值,则输出为0,否则为100。
- >0:输出大于指定值时匹配输入,否则为0。
- <0:输出在小于指定值时匹配输入,否则为0。
- 绝对值:输出是输入的绝对值(编辑指定的值将改变绝对值的应用方式)
- 指数曲线:将输入的指数曲线应用于非线性响应(可编辑参见:ref:curve-editing)。
- 死区:输出将不会响应接近零的输入值(可编辑参见:ref:curve-editing)。
- 多点曲线:曲线是基于 3,5,7,9,11 或 13 个用户定义的点(可编辑参见:ref:curve-editing)。
任何上述曲线中的偏移默认值为 0(零)。如果你改变了曲线的一个输入,偏移可能被转移到新的曲线。
9.2.10. 曲线编辑¶
可以选中需要编辑的曲线并且按ENT键来打开曲线编辑页面。 45度曲线和 固定曲线类型可能不会被编辑,如果其中一条曲线当前处于启用状态,曲线编辑 页面则不可选。
曲线编辑器页面将根据选择的曲线而有所不同。 无法从曲线编辑器中更改 曲线类型(除非选择了多点曲线)。值可以通过使用按钮或者点击图形来改变。
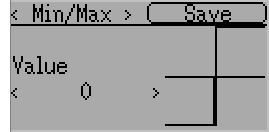
对于最低/最高,零/最大,> 0,< 0,和绝对值,控件允许沿 X 轴设置转换点。值“0”将围绕 y 轴对称,正值或负值将相应地移动中立点。
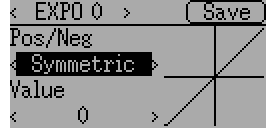
对于指数曲线, 控件允许独立配置曲线的形状以获得大于或小于零的值。
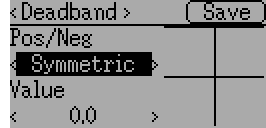
对于死区曲线, 控制器允许独立配置死区宽度的值大于或小于零。
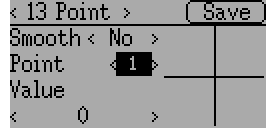
对于多点曲线, 每个点可以单独设置。点通过选择点号然后选择一个 值来设置。允许的最小点数是 3,最大点数是 13。启用“Smooth” 将应 用平滑功能,而不是通过直线连接点。
9.3. 定时器¶
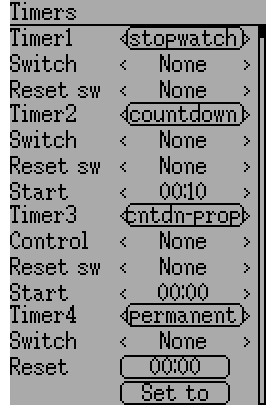
定时器页面可以定义多达 4 个可用的定时器。定时器可以计时或倒计时, 可以从主屏幕手动启用或通过输入触发器(摇杆或者开关)启用。
可用的计时器有秒表,倒计时,比例秒表,比例倒计时和持续计时。
定时器也可以选择配置为通过备用开关重置(仅在使用高级菜单时)。
两个比列定时器都需要一个介于 0 和 100 之间的输入才能正常工作。如果 使用这些定时器作油门虚拟混控必须使用输入-100 至 100 的值转换成 0 到100。
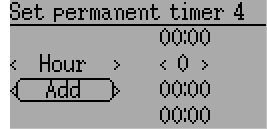
持续计时器类似于里程表,并且它们的值保存在 model.ini 文件里。在开启遥控器时,他们将保持以前的值。您可以使用“设置为”按钮来设置计时器,并通过按“重置”按钮进行重置。
9.4. 双向回传设置¶
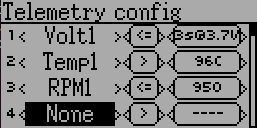
双向回传设置页面允许在特定的回传事件发生时指定报警。
- 双向回传设置:指定用于报警控制的回传输入。可用的值取决于通信协议。
- 比较:可以是“>”或“<=”设置目标之上或之下的值是否导致报警。按 下 ENT 键将播放一次报警声。
- 目标:报警的目标值。另外,按下ENT键你可以设置一个时间延迟(0-9秒 之间),在触发报警之前必须持续达到目标值。
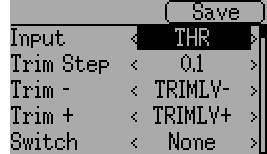
9.5. 微调和虚拟输入¶
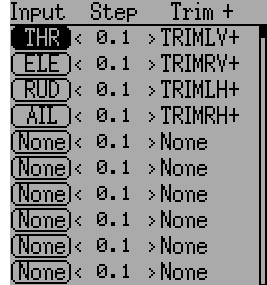
微调页面允许指定微调输入和微调幅度,以及配置按钮以用作虚拟输入。 (见使用微调作一个虚拟开关)。它通过主菜单的“模型设置”里的“微调”访 问。
如果“输入”被设置为输入摇杆,然后微调可以用作混控的一部分,并且作 为一个典型的微调操作。如果“输入”被设置为通道或虚拟通道输出,则该值直 接应用于通道输出。在这种情况下,所选择的“微调+”和“微调 -”按钮可以 作为虚拟摇杆以控制输出通道。
微调幅度定义了微调输入的灵敏度。微调幅度最大数是+/- 100。步长为 0.1时,伺服系统可以进行完整的+/-10%的调整。
微调幅度可以在主屏幕上修改。如果你还必须更改来源,需要通过按下相应的输 入按钮来访问对话框。 在这里你也可以添加一个开关到微调。 如果开关被添加 到微调,那么它将在每个开关位置具有不同的微调值。
9.6. 数据记录 Datalog¶
注意:Devo7e不支持此功能。
数据记录功能可存储历史的输入或输出位置,以及一段时间内的回传信息。 这可以用于检查和重现飞行,以及在之后输出可视化回传信息。日志是持续记录 的,Deviation 默认情况下会继续写入到以前的日志的结尾。
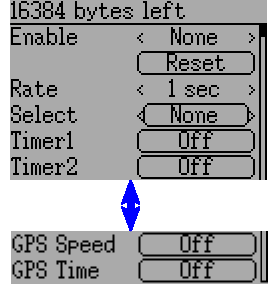
- #bytes left:表示内存满之前有多少字节日志可以写入。
- Enable:启用日志记录
- 重置:重置并清空当前记录。
- Rate:多久写入一次信息到日志文件。
- Select:快速设置或重置记录数值。
- Controls:“Select”是可以被记录的所有控件的列表。它们包括定时器,输 入,输出,和虚拟通道,和双向回传。项目记录越多,日志填满的速度越 快。
记录的更多信息默认状态下,日志仅可以占用 16kB空间的数据。可以通过更改 来增加要存储的数据量,需要通过遥控器上的 datalog.bin文件设置。Deviation不能增加该文件的大小,所以它的大小表示可以存储的最大数据。
注:只有高级模式才有此功能。目前还没有提供给日志分析软件,并且它们不能 在遥控器内显示。请在 www.deviationtx.com 的下载界面查找转换工具。
9.7. 主页面设置¶
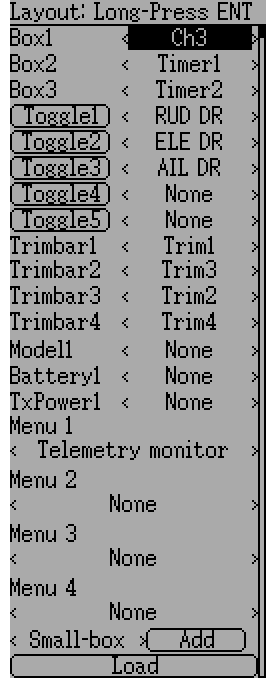
主页面设置页面是用来配置主页面显示的。此页面允许定义哪些元素显示在 主页上。
下列为可显示的类型:
- Box:显示数值。值可以是定时器,通道数值,摇杆输入,等等。有两种类 型的 Box:大和小。唯一的区别是框的大小及其中的文本。
- Trimbar:显示微调值。这些通常是通过微调开关控制,并且显示当前微调位 置是什么。有两种类型的微调。V-微调显示垂直微调,H-微调显示水平微 调。将所有微调加入后将只显示数字。
- Model(Icon):显示与所选择的模型的图标。
- Battery:显示电池电压。
- TxPower:显示实际发射功率。
- Bargraph:显示一个条。条是通道输出的值。
- Toggle:显示拨动开关状态的图标。开关位置的不同状态可以定义 1,2 或 3个图标,用来显示切换。两段开关最多可以有 2 个图标。三段开关最多可以有 3个图标。
- 快捷菜单:快速菜单定义可通过长按 UP / DN 到达快速访问页面。
9.7.1. 设置项目位置¶
注意:Devo7e不支持此功能。
长按 ENT 键从模型设置页切换到项目设置界面。每一个项目都可以使用 UP / DN 按钮来选择。再次按下 ENT 将允许移动选定项目的位置。UP/DN / L+ / R- 按钮将所选择的项目在屏幕上移动。按 EXT 退出移动模式,再次按将 回到主界面的配置菜单。
9.7.2. 创建项目¶
注意:Devo7e不支持此功能。
从左选择框选择项目类型,然后按“ Add ”来创建项目。这将把相关的对 象类型与类型“无”(如适用)添加到相关部分的菜单中。然后将光标移动到新 创建的项目,然后根据需要设置。
9.7.3. 读取对象¶
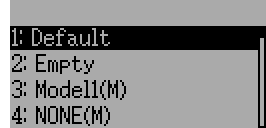
你可以“读取”备用模板,改变主页面布局。
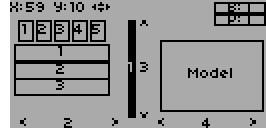
如果选择“Default”,主页将被设置为标准布局,见:ref:main-page.。
选择“Empty”将清除所有项目。你可以从头开始设置。
如果你想使用其他模型中的布局,选择你希望使用的模型布局。项目位置 (参见:ref:configuring-object-position)被设置为你选择的现有模板或模型。根据模板设置的模 型,文件列表内有标识(M)。
此外,这些模板可以在仿真器中创建或从论坛下载或者甚至可以手工编辑modelxx.ini 文件进行设置。
9.7.4. 设置项目¶
- Box:通过选择框选择计时器,双向回传,通道,或输入
- Trimbar:通过选择框选择微调通道
- Model:不能设置
- Battery:不能设置。
- TxPower:不能设置。
- Bargraph:通过选择框选择一个通道
- Toggle:通过选择框选择一个通道或输入,按下相关的“toggle”选择按钮
- 快捷菜单:选择四个快捷菜单的显示界面
你可以删除除了快捷菜单外的任何项目,通过选择“删除”选项,然后按下 “ENT”按钮。
9.7.5. 选择 Toggle 图标¶
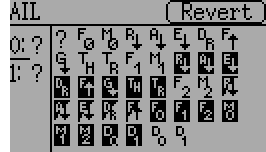
在一个 Toggle 项目上按下“Toggle”按钮可以选择相关的图标。通道,摇 杆,和两段开关可以有 2个图标。三段开关(如果有的话)可以有 3个图标。2(或 3)个图标的每一个都可以被设置为空,表示此状态没有图标。Deviation 固 件提供了几个预定义的图标选择。
9.8. 标准模式¶
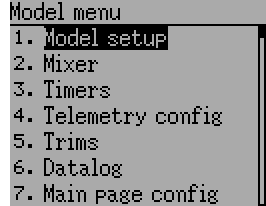
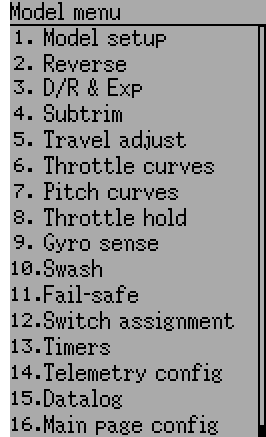
- Model setup: Model configuration page (See section 模型设置)
- Reverse: Servo reverse
- D/R & Exp: Dual-rates setup
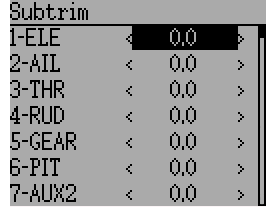
- Subtrim: Servo sub-trim
- Travel adjust: Servo travel-adjust
- Throttle curves: Throttle curve setup
- Pitch curves: Pitch curve setup
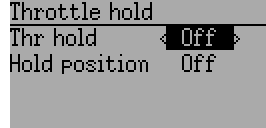
- Throttle hold: Throttle-hold configuration
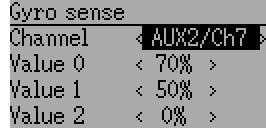
- Gyro sense: Gyro-sense configuration
- Swash: Swash Setup
- Fail safe: Fail-Safe configuration
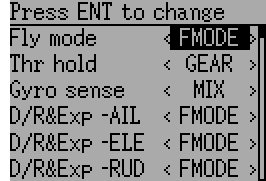
- Switch assignment: Assign switch controls
- Timers: Timer configuration (See section 定时器)
- Telemetry config: Configure telemetry alarms (See section 双向回传设置)
- Datalog: Configure telemetry logging (See section 数据记录 Datalog)
- Main page config: Configure main page display (See section 主页面设置)
9.8.1. 反向¶
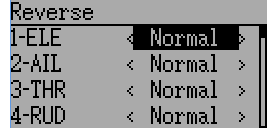
舵机反向页面允许快速设定每个通道在正常或反向模式下工作。这些设置相当 于使用高级模式 GUI 时混控菜单的通道配置子页面上的“反向”设置(见:ref:channel-config)
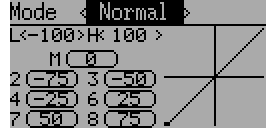
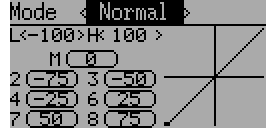
9.8.2. 舵量/曲线¶
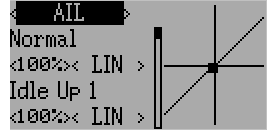
舵量/曲线页面是副翼,方向舵和升降舵通道曲线的配置。每个通道可以分 为三段,以及每个可以选择一个线性放大或指数曲线。设置的数值取决于开关分 配页面上的双速率功能开关(见开关分配)
9.8.4. 舵机行程¶
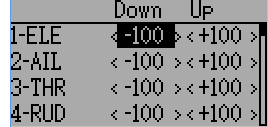
舵机行程调整页面设置每个舵机的最大正/负行程。这相当于高级模式 GUI混控菜单的通道设置子页面上的“比例+”“比例-”设置(见通道设置)。可接受 的“比例-”值从-175 到-1,“比例+”值的范围从+1 到+175。默认值分别为-100至+100。
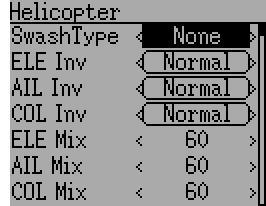
9.8.5. 十字盘设置¶
在十字盘设置页面设置十字盘类型。关于十字盘类型的更多信息可以在 swash-mixing`中找到。此页面上的设置等同于模型设置页(请参阅:ref:`model-setup),下面提供两个设置页面。

可用的十字盘模式有:
- 无/ 单舵机:用于 FBL。混控在接收器工作。
- 120 / 3 舵机 120:120 度十字盘
- 120X / 3 舵机 120X:120 度十字盘(交替配置)
- 140 / 3 舵机 140:140 度十字盘
- 90/3 舵机 90:90 度十字盘
升降螺距,副翼螺距,和 PIT Mix 是混控完成之前,添加到输入摇杆的比例 因素。这些可以被用于调整不同的连结长度或不同的舵机摆动。允许的范围为 - 100 至 100,默认 60。注意,这些值设置过大可能会导致过多的舵机摆动,使摇杆控制模型反应迟钝。