8. 遥控器菜单¶
8.1. 遥控器设置¶
配置页定义了各种遥控器功能。它是从主菜单中进入,进入“遥控设置”下, 然后是“遥控设置”。请注意,本节中的所有屏幕截图都显示的是 Deviation 默 认设置。
8.1.1. 通用设置¶
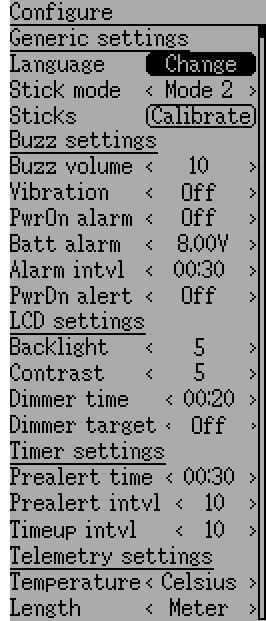
注意:Devo7e不支持此功能。
摇杆模式:选择模式 1-4。
- 模式 1 在欧洲是常见的。升降和方向舵在左边,油门和副翼在右边。
- 模式 2 在北美洲是普遍的。油门和方向舵在左边,升降和副翼在右边。
- 模式 3 升降和副翼在左边,油门和方向舵在右边。
- 模式 4 油门和副翼在左边,升降和方向舵在右边
摇杆:校准所有摇杆和旋钮。
要执行摇杆校准,请把光标移到校准选项并按 ENT 按钮。按照屏幕提示移动摇杆,并按 ENT 按钮确认。
8.1.2. 报警设置¶
关机提醒:选择遥控器未操作时通知的间隔。范围为 0-60 分钟,以 1 分钟为增量。
电压报警:设置电池报警电压。电压范围为 3.30V-12.00V,以 0.01V为增量。
报警间隔:当电池电量不足时设置报警频率。警报间隔范围可以设置从 5 秒到1 分钟,以 5 秒为增量。它也可以被设置为 Off。
音量:设置蜂鸣器音量。可用范围为 1-10;蜂鸣器也可以设置为“无”。
振动:在报警时启用振动 。
关机提示: 在关机时播放声音。
8.1.3. 液晶屏设置¶
背光:设置屏幕背光的亮度。可以从 1 到 10 设置。也可以关闭。
对比度:设置屏幕对比度。可以从 1 到 10 设置。也可以关闭。
背光减弱:在屏幕变暗之前设置延迟。时间可以设置从 5 秒到 2 分钟,增 量为 5 秒。设置关闭时,遥控器将强制背光开启。
背光最小亮度:设置变暗时的屏幕亮度。可以从 1 到 10 设置。也以可关闭。
8.1.4. 定时器设置¶
预警时间:计时器到达零时开始报警。时间可以设置从 5 秒到 1 分钟,增量为5 秒,也可以关闭。
预警间隔:计时器在定时器达到零之前发出报警的间隔。间隔可以设置从 1 到60 秒,也可以关闭。
超时报警间隔:计时器超时后发出报警的频率。间隔可以设置从 1 到 60 秒,也可以关闭。
8.2. 通道监控¶
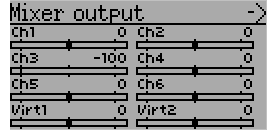
通道监控界面允许用户查看遥控器输出的每个通道的值。没有设置的通道将 不会显示。显示的通道输出值是基于最小值/最大值以及缩放的值。
例如:一个通道只从-60 到+60,那么摇杆位置显示的范围也只从-60 到+60。
8.3. 输入监控¶
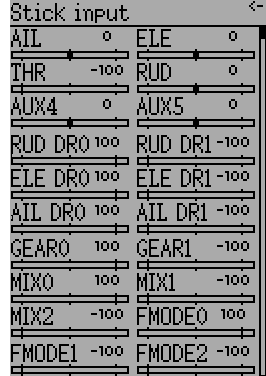
摇杆输入界面显示了摇杆当前位置对应的值。显示的值是总范围的百分比, 比例从-100%到+ 100%。
注意:Devo7e只支持AIL, ELE, THR, RUD, HOLD0, HOLD1, FMOD0和FMOD1。
8.4. 双向回传监控¶
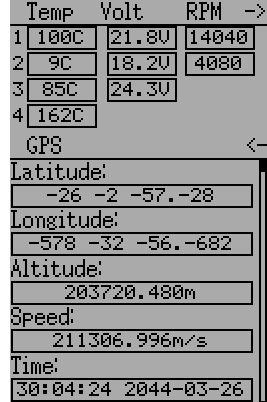
某些协议可以在使用期间将数据发送回遥控器。回传数据包括,但不限于, 温度读数,各种电压读数,电机或螺旋桨转速,以及 GPS 相关的信息。
除了 DEVO 和 FrSky 之外,所有支持的协议都默认关闭遥测数据。请参见9 协议部分,然后了解哪些协议支持回传,并确定哪些信息将可用。
由于每个协议中可以返回的数据类型不同,请参阅原始设备制造商的文档,了解需要什么额外的硬件来收集这些数据。
直到所有有效数据传输的值都高亮显示。

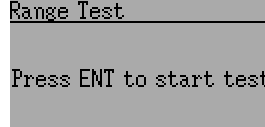
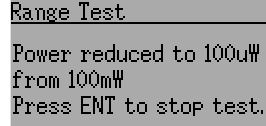
8.5. 拉距测试¶
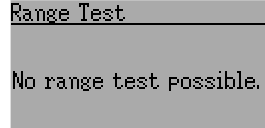
建议你在建立新模型的第一时间进行拉锯测试,以确保你能够在正常飞行 距离之内控制你的模型。在一些俱乐部,这是必要的安全措施。你可以在拉锯测试页面完成测试。 一旦拉锯测试界面打开,按“ENT”按钮,开始拉锯测试。最大最小功率将 被显示。测试标准程序是,步行约 30 米的距离,并确保你仍然可以控制你的飞 机。然后,您可以按“ENT”按钮结束拉锯测试然后恢复发射功率。按下“EXT” 按钮退出测试页面也将恢复发射功率。 遥控范围通过发射功率变化的平方根减小。所以从 100MW到 100uW代表 大约 1000功率的变化,或者一个因素使范围缩小超过 30。因此 30米拉锯测试 正常将表明你应该能够控制模型距离大于 900米。 用于当前模型的已安装的 RF 模块必须具有 PA。如果不是这样的话,或者为 模型选择的功率电平已经在最小值,那么将显示一个到该效果的消息。 |
|