10. Дополнительная информация¶
10.1. Настройка режима тренера¶
Deviation в режиме тренера может использоваться как передатчик инструктора (master) или ученика (slave). В этом режиме, инструктор и ученик соединяют свои передатчики кабелем тренера через порт DSC. Фактически с моделью связывается передатчик инструктора, но инструктор может использовать переключатель, чтобы позволить ученику управлять моделью. Когда переключатель включен, передатчик ученика посылает информацию о вводе (стики) через кабель тренера в передатчик инструктора, и этот сигнал заменяет управление инструктора.
Deviation может быть настроен для работы практически с любым передатчиком, который поддерживает ведущий (master) или ведомый (slave) режим. Настройка Deviation на другого производителя требует знания параметров PPM для парного передатчика, и правильной настройки ‘Center PW’ и ‘Delta PW’, а также знания количества и порядка передаваемых каналов. Лучшее место для поиска такой информации - спросить на форумах www.deviationtx.com.
10.1.1. Режим ведущего (Master)¶
Режим ведущего (Master) настраивается с помощью выбора „Channel“ или „Stick“ в полосе прокрутки ‘PPM In’ в разделе Настройка модели (Std & Adv GUI). Нажатие кнопки „ENT“ вызовет страницу ‘Trainer Cfg’. Эти 2 режима ведут себя несколько по разному:
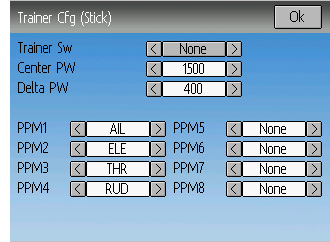
Stick: В этом режиме, каждый входной канал отображается на стик передатчика инструктора. Ученик, перемещая стик, управляет так же, как если бы инструктор переместил стик. В целом, при использовании этого режима, передатчик ученика будет напрямую передавать положение стика (без микширования), а передатчик инструктора будет выполнять все необходимое микширование.
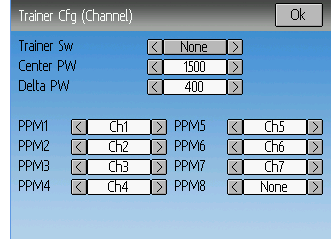
Channel: В этом режиме, каждый входной канал отображается на выходной канал передатчика инструктора. Передатчик ученика должен выполнять все необходимое микширование для управления моделью. Необходимо следить, чтобы передатчики инструктора и ученика были настроены одинаково, в противном случае, модель может реагировать по разному при переключении управления между инструктором и учеником.
Параметры, настраиваемые на обеих страницах для тренера:
- Center PW: Определяет время (в мксек) импульса, который передает передатчик ученика, чтобы представить центральное положение сервопривода. Если это число не соответствует передатчику ученика, сервопривод будет не по центру.
- Delta PW: Определяет ширину импульса (измеренную от центра), посылаемого передатчиком ученика, для определения максимального расхода сервопривода. Если это значение неверно, сервоприводы не достигнут полного расхода (или расход будет слишком большим).
- Trainer Sw: Назначает переключатель, который позволяет ученику управлять моделью.
- PPM1…PPM8: Определяет отображение (каналов или вводов) от передатчика ученика к передатчику инструктора.
10.1.2. Режим ведомого (Slave)¶
Режим ведомого настраивается выбором „PPM“ в качестве протокола в разделе Настройка модели (Std & Adv GUI). Нажатие кнопки „ENT“ на полосе прокрутки „Protocol“ позволяет настроить параметры вывода. Для настройки смотрите раздел Протокол: USBHID. Имейте в виду, что Deviation отправит выходные данные каналов через PPM. Для использования ведомого передатчика Deviation с ведущим (Master) передатчиком Deviation настроенным для режима „Stick“ (смотри выше), в ведомом передатчике не должно быть настроено никакого микширования.
10.2. Настройка FPV и других внешних вводов¶
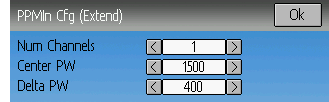
Deviation имеет возможность использовать входные сигналы PPM от внешних источников (такие, как FPV). Для настройки этого режима, установите „PPM In“ в режим ‘Extend’ в разделе Настройка модели (Std & Adv GUI).
После настройки, нажмите „ENT“ на полосе прокрутки „PPM In“ для дополнительной настройки.
Параметры для настройки:
- Center PW: Определяет ширину импульса для отцентрованного ввода (в мксек).
- Delta PW: Определяет разницу в ширине импульса (от центрального значения) для достижения максимального расхода сервопривода.
- Num Channels: Определяет количество входных каналов (обычно поддерживается не более 8 каналов).
10.3. Использование триммера в качестве виртуального переключателя¶
Deviation имеет возможность создавать виртуальные переключатели для дополнения механических переключателей передатчика. Эта возможность доступна только при использовании „Advanced“ GUI. Доступны 4 типа переключателей:
- Momentary: Переключатель будет активен только до тех пор, пока кнопка триммера удерживается нажатой.
- Toggle: Переключатель будет переключаться между положениями включено/выключено при каждом нажатии на кнопку триммера.
- On/Off: Кнопка „Trim+“ будет включать переключатель, а кнопка „Trim-„ будет выключать переключатель.
- 3 Pos: Переключатель будет активен в одном направлении, пока удерживается нажатой кнопка „Trim+“, и будет активен в другом направлении, пока удерживается нажатой кнопка „Trim-„, и возвращается в центральное положение при отпускании.
Для настройки виртуального переключателя, начните с выбора триммера на странице „Trim“, и затем войдите на страницу настройки триммеров. Смотрите Триммеры и виртуальные органы управления (Std & Adv GUI)
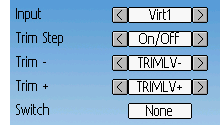
Затем установите поле „Trim Step“ в „Momentary“, „Toggle“, „On/Off“ или „3 Pos“. Это выполняется нажатием левой стрелки на полосе прокрутки „Trim Step“ пока значение не станет меньше 0.1. Затем выберите в „Input“ виртуальный канал для преобразования в переключатель (мы будем использовать „Virt1“).
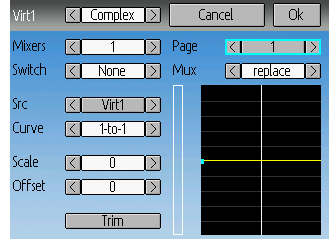
Теперь перейдите на страницу „Mixer“, и введите конфигурацию для указанного выше виртуального канала („Virt1“ в нашем примере).
Установите тип микшера в „Complex“, установите „Src“ в текущий виртуальный канал („Virt1“), установите кривую в „1-to-1“ (не используйте „Fixed“), установите масштаб в „0“, и наконец включите кнопку „Trim“.
Теперь вы можете использовать виртуальный канал („Virt1“) как любой другой переключатель. Когда виртуальный переключатель активен, виртуальный канал будет иметь значение 100, в противном случае он будет иметь значение -100. В случае „3 Pos“, виртуальный канал будет иметь значение -100, когда триммер нажат в одном направлении, значение +100, когда триммер нажат в другом направлении, и значение 0, когда он отпущен.
Примечание: Если вы используете виртуальный канал в качестве „Src“ (а не „Switch“), убедитесь, что для этого микшера отключен „Trim“, в противном случае триммер будет применен дважды.
10.4. Микширование тарелки перекоса¶
Тарелка перекоса используется для управления полетом вертолета. Тарелка перекоса управляет плоскостью вращения главного ротора, а также шагом лопастей. Тарелка перекоса обычно соединена с тремя сервоприводами, известными как „Elevator“, „Aileron“ и „Collective“, но из-за ее конструкции, не существует соответствия 1-к-1 между перемещением стика и перемещением сервопривода. Вместо этого требуется некоторое микширование между стиками „throttle“, „elevator“ и „aileron“ и сервоприводами тарелки перекоса. Это микширование известно как микширование коллективного шага (Collective Pitch Mixing, CCMP).
Традиционно, RC вертолеты использовали сервоось (flybar) выше или ниже главного ротора, прикрепленную к ряду связей, для поддержания стабильности. В таких конфигурациях, передатчик, как правило, выполняет все микширование, и напрямую управляет каждым из 3 сервоприводов тарелки перекоса. Эта конфигурация известна как manual-CCPM (mCCPM). В качестве альтернативы, электронный микшер может быть включен в вертолет как часть приемника, или между приемником и сервоприводами, чтобы осуществлять надлежащее микширование. Эта конфигурация известна как electronic CCPM (eCCPM) и в этом случае, передатчик напрямую передает „aileron“, „elevator“ и „collective“, а электронный микшер будет преобразовывать сигналы в соответствующее перемещение сервоприводов тарелки перекоса.
В последнее время, стали более распространенными вертолеты без сервооси (FBL), особенно в микроразмерном диапазоне. Эти вертолеты используют систему eCCPM вместе с электронным гироскопом для непрерывной регулировки тарелки перекоса, для поддержания стабильности без необходимости использовать физическую сервоось (flybar). Эта конфигурация имеет тенденцию быть менее дорогой в производстве, а также обеспечивает лучшую стабильность и более точное управление.
Deviation предоставляет управление для нескольких схем тарелки перекоса, это включает: 120°, 120° альтернативный, 140°, 90° и „None“. Каждый их этих вариантов показан ниже:
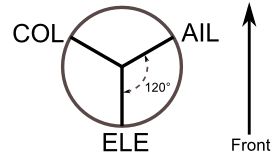
120 (3 Servo): Сервоприводы размещены вокруг тарелки перекоса с интервалом 120°. При вводе „Aileron“, сервоприводы „aileron“ и „pitch“ наклоняют тарелку перекоса влево и вправо; при вводе „Elevator“, три сервопривода наклоняют тарелку перекоса вперед и назад; при вводе „Pitch“, все три сервопривода перемещают тарелку перекоса вверх и вниз. Сервоприводы, работающие в унисон, значительно увеличивают доступный крутящий момент, а также точность и центрирование.
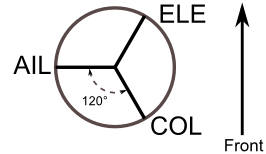
120X (3 Servo): Такая же схема, как и выше, за исключением того, что сервоприводы смещены на 150°. При вводе „Aileron“, три сервопривода наклоняют тарелку перекоса влево и вправо; при вводе „Elevator“, сервоприводы „elevator“ и „pitch“ наклоняют тарелку перекоса вперед и назад; при вводе „Pitch“, все три сервопривода перемещают тарелку перекоса вверх и вниз.
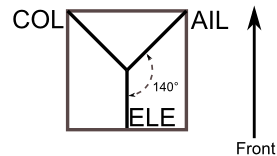
140 (3 Servo): По существу, работа сервоприводов 140° тарелки перекоса почти совпадает с 120° тарелкой перекоса. Однако, механика сервоприводов для работы „elevator“ отличается. CCPM 140° тарелки перекоса обеспечивает более плавную работу комбинированных сервоприводов и равномерный циклический расход. При 120° конфигурации, левый/правый циклический расход немного быстрее, чем передний/задний.
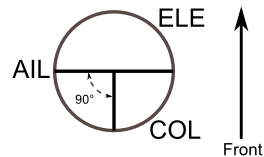
90 (3 Servo): При вводе „Aileron“, сервоприводы „aileron“ и „pitch“ наклоняют тарелку перекоса влево и вправо; при вводе „Elevator“, сервоприводы наклоняют тарелку перекоса вперед и назад; при вводе „Pitch“, все три сервопривода перемещают тарелку перекоса вверх и вниз. Чаще всего используется для электрических вертолетов.
None: Это особый случай, где все микширование выполняется на борту вертолета с использованием гироскопической системы управления полетом. Обратитесь к инструкциям производителя, чтобы узнать, как настроить выходы микшера.
Примечание: Некоторые вертолеты имеют схему 120 или 140, но повернутую на 180 градусов. В этих случая вы по-прежнему будете использовать обозначенный тип тарелки перекоса, но может потребоваться реверсировать определенный каналы.
10.5. Изменение звуков¶
Вы можете редактировать звуки, которые издает ваш Devo, хотя для этого вам потребуется использовать передатчик в качестве USB накопителя и редактировать файл „sound.ini“ в папке „media“.
Разделы, и события, которые вызывают их воспроизведение:
- startup: Включение питания.
- shutdown: Выключение питания.
- volume: Настройка громкости передатчика.
- timer_warning: Таймер истекает.
- alarm#: Таймер # (от 1 до 4) истек.
- batt_alarm: Предупреждение о разряде батареи.
- done_binding: Привязка завершена.
- key_pressing: При нажатии на кнопку.
- saving: При сохранении файла модели.
- max_len: Когда вы превышаете длину строки на клавиатуре.
- telem_alarm#: Срабатывание сигнала телеметрии # (от 1 до 6).
В каждом разделе, вы можете установить громкость (volume) от 0 (выключено) до 100 (максимум). Остальные записи это имена нот, а значение это число миллисекунд для проигрывания этой ноты. Для каждого звука есть предел в 100 нот.
Названия нот - „xx“, который является паузой (звук не воспроизводится). Затем вы можете выбрать ноту („a“-„g“), повысить ее на пол тона, добавив „x“, если это „a“, „c“, „d“, „f“ или „g“. Наконец вы можете выбрать октаву одной цифрой, от „0“ до „4“. Это приводит к ряду от „c0“ (middle C) до „b4“. Кроме того, „a“, „ax“ и „b“ будут воспроизводить три ноты ниже middle C.