9. Протоколы¶
Некоторые протоколы имеют дополнительные настройки или ограничения. Каждый из протоколов описан ниже. Звездочка (‘*’) перед названием протокола в заголовке раздела означает, что для поддержки протокола необходимо добавить в передатчик аппаратный модуль. На экране передатчика звездочка означает, что Deviation не обнаруживает требуемый модуль (не установлен, неправильный „hardware.ini“, или другие проблемы взаимодействия с модулем). Дополнительную информацию можно найти в руководстве по установке модуля:
http://www.deviationtx.com/wiki/#hardware_modifications
9.1. Протокол: DEVO¶
Протокол DEVO используется для обеспечения совместимости с приемниками/моделями Walkera DEVO. Этот протокол поддерживает до 12 каналов. Протокол DEVO поддерживает автоматическую привязку и ручную привязку. Если „Fixed ID“ установлен в ‘None’, передатчик будет пытаться автоматически привязаться к приемнику при каждом включении питания. Если для „Fixed ID“ установлено значение, приемник должен быть привязан вручную один раз с помощью кнопки ‘Bind’, после чего он должен оставаться привязанным. Имейте в виду, что „Fixed ID“ является только частью процедуры привязки. Два передатчика с одинаковым „Fixed ID“ не могут управлять одной и той же моделью.
Протокол DEVO также поддерживает включение/выключение возможности телеметрии. Эта опция доступна по нажатию на полосу прокрутки «Протокол», когда отображается «DEVO». Имеются опции «Std» (стандартный формат), «X350» (формат Walkera QR-X350), и «Off».
Следующие поля доступны для телеметрии Devo. Имейте в виду, что не все модели/приемники передают все поля, и некоторые поля требуют наличия дополнительных модулей.
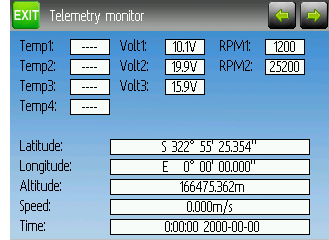
- Temp1/2/3/4: Показания температуры. Это может быть батарея, мотор или температура окружающей среды
- Volt1/2/3: Показания напряжения для батареи приемника, и внешних батарей
- RPM1/2: Значения оборотов мотора/двигателя
- GPS Data: Текущие координаты, скорость и высота от модуля GPS
9.2. Протокол: WK2801¶
Протокол WK2801 используется для управления старыми моделями Walkera. Предыдущие модели Walkera были разделены на 3 сходных, но не идентичных протокола: WK2801, WK2601, WK2401. Это примерно соответствует количеству поддерживаемых каналов, но многие из новых 6-канальных приемников фактически поддерживают протокол WK2801. Рекомендуется сначала попробовать протокол WK2801, при работе со старыми моделями Walkera, прежде чем пробовать WK2601 или WK2401, так как WK2801 является лучшим протоколом. Протокол WK2801 поддерживает до 8 каналов, автоматическую и ручную привязку. Если „Fixed ID“ установлен в ‘None’, передатчик будет пытаться автоматически привязаться к приемнику при каждом включении питания. Если для „Fixed ID“ установлено значение, приемник должен быть привязан вручную один раз с помощью кнопки ‘Bind’, после чего он должен оставаться привязанным.
9.3. Протокол: WK2601¶
Протокол WK2601 используется для управления старыми моделями Walkera. Предыдущие модели Walkera были разделены на 3 сходных, но не идентичных протокола: WK2801, WK2601, WK2401. Это примерно соответствует количеству поддерживаемых каналов, но многие из новых 6-канальных приемников фактически поддерживают протокол WK2801. Рекомендуется сначала попробовать протокол WK2801, при работе со старыми моделями Walkera, прежде чем пробовать WK2601 или WK2401, так как WK2801 является лучшим протоколом. Протокол WK2601 поддерживает до 7 каналов, и только автоматическую привязку. „Fixed ID“ может быть использован, но он не препятствует автоматической привязке при включении питания.
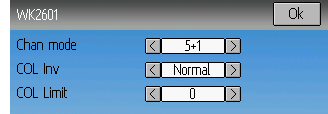
Протокол WK2601 также поддерживает дополнительные опции. Эти опции доступны при нажатии на полосу прокрутки „Protocol“, когда отображается „WK2601“:
Chan mode: Устанавливает как обрабатываются каналы:
- 5+1: Каналы AIL, ELE, THR, RUD, GYRO (ch 7) являются пропорциональными. Gear (ch 5) дискретный. Ch 6 отключен.
- Heli: Каналы AIL, ELE, THR, RUD, GYRO являются пропорциональными. Gear (ch 5) дискретный. COL (ch 6) связан с Thr. Если Ch6 >= 0, приемник применяет 3D кривую к Thr. Если Ch6 < 0, приемник применяет нормальные кривые к Thr. Значение Ch6 определяет соотношение COL к THR.
- 6+1: Каналы AIL, ELE, THR, RUD, COL (ch 6), GYRO (ch 7) являются пропорциональными. Gear (ch 5) дискретный. Этот режим очень экспериментальный.
- COL Inv: Инвертирует сервопривод COL.
- COL Limit: Устанавливает максимальный диапазон сервопривода COL.
9.4. Протокол: WK2401¶
Протокол WK2401 используется для управления старыми моделями Walkera. Предыдущие модели Walkera были разделены на 3 сходных, но не идентичных протокола: WK2801, WK2601, WK2401. Это примерно соответствует количеству поддерживаемых каналов, но многие из новых 6-канальных приемников фактически поддерживают протокол WK2801. Рекомендуется сначала попробовать протокол WK2801, при работе со старыми моделями Walkera, прежде чем пробовать WK2601 или WK2401, так как WK2801 является лучшим протоколом. Протокол WK2401 поддерживает до 4 каналов, и только автоматическую привязку. „Fixed ID“ может быть использован, но он не препятствует автоматической привязке при включении питания.
9.5. Протокол: DSM2¶
Протокол DSM2 используется для управления многими приемниками Spektrum™ и JR™, а также другими моделями, использующими этот протокол. Протокол DSM2 может поддерживать до 12 каналов. Имейте в виду, что многие приемники с количеством каналов меньше 8 требуют, чтобы передатчик посылал 7, или менее, каналов. Убедитесь, что вы установили подходящее количество каналов. Протокол DSM2 не поддерживает автоматическую привязку. Если Fixed ID установлен в None, вместо него используется ID передатчика. Необходимо вручную привязать каждую модель перед первым использованием.
Обратите внимание, что привязка не завершится, пока вы не переместите стик AIL или ELE. Таким образом вы вы сможете нажать кнопку „Failsafe“ на некоторых приемниках, для установки безопасных значений каналов.
Протокол DSM2 также поддерживает включение/выключение функции телеметрии. Эта опция доступна при нажатии на полосу прокрутки „Protocol“, когда отображается „DSM2“.
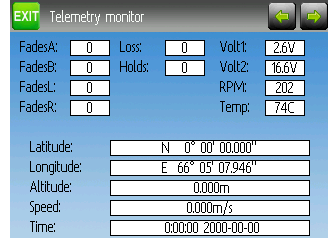
Для DSM2 телеметрии доступны следующие поля. Имейте в виду, что для получения этих данных необходим модуль с телеметрией и дополнительные датчики.
- FadesA/B/L/R: Количество раз, когда каждая антенна получала слабый сигнал. В идеале эти числа должны быть одинаковыми, указывая на равномерный прием каждой антенной.
- Loss: Количество полных потерь сигнала (пропущенный кадр).
- Holds: Количество раз, когда приемник переходил в безопасное состояние из-за длительной потери сигнала.
- Volt1/2: Напряжение батареи для приемника и внешнего источника.
- RPM: Обороты мотора/двигателя.
- Temp: Показания температуры от датчика температуры.
- GPS Data: Текущие координаты, скорость и высота от модуля GPS
9.6. Протокол: DSMX¶
Протокол DSMX используется для управления многими приемниками Spektrum™ и JR™, а также другими моделями, использующими этот протокол. Протокол DSMX может поддерживать до 12 каналов. Имейте в виду, что многие приемники с количеством каналов меньше 8 требуют, чтобы передатчик посылал 7, или менее, каналов. Убедитесь, что вы установили подходящее количество каналов. Протокол DSMX не поддерживает автоматическую привязку. Если Fixed ID установлен в None, вместо него используется ID передатчика. Необходимо вручную привязать каждую модель перед первым использованием.
Обратите внимание, что привязка не завершится, пока вы не переместите стик AIL или ELE. Таким образом вы вы сможете нажать кнопку „Failsafe“ на некоторых приемниках, для установки безопасных значений каналов.
Имейте в виду, что в отличие от передатчиков Spektrum™ или JR™, Deviation не будет автоматически выбирать между DSM2 и DSMX. Пользователь сам должен выбрать, какой протокол использовать.
Протокол DSMX также поддерживает включение/выключение функции телеметрии. Эта опция доступна при нажатии на полосу прокрутки „Protocol“, когда отображается „DSMX“.
Список полей телеметрии протокола DSMX идентичен списку протокола DSM2, и документирован в разделе Протокол: DSM2.
9.7. Протокол: J6Pro¶
Протокол J6Pro используется для управления моделями Nine Eagles™. Могут использоваться только модели совместимые с передатчиком J6Pro. Многие старые 4-канальные модели Nine Eagles используют другой протокол, который не поддерживается. Протокол J6Pro поддерживает до 12 каналов, хотя были протестированы только модели с 6 каналами. Протокол J6Pro не поддерживает автоматической привязки. Если „Fixed ID“ установлен в „None“, вместо него используется идентификатор передатчика. Перед первым использованием необходимо вручную привязать каждый приемник.
9.8. Протокол: WFLY¶
Протокол WFLY поддерживает приемники WFLY, такие как WFR04S, WFR07S и WFR09S.
Протокол поддерживает до 9 каналов. По умолчанию порядок каналов AETR.
9.9. Протокол: *Flysky¶
Протокол Flysky используется для управления приемниками Turnigy/Flysky, а также несколькими другими приемниками, использующими протокол AFHDS (WL V911, Xieda 9958 и т.п.). NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол Flysky поддерживает до 12 каналов, автоматическую и ручную привязку. Если „Fixed ID“ установлен в ‘None’, передатчик будет пытаться автоматически привязаться к приемнику при каждом включении питания. Если для „Fixed ID“ установлено значение, приемник должен быть привязан вручную один раз с помощью кнопки ‘Bind’, после чего он должен оставаться привязанным.
Протокол Flysky также поддерживает расширения WLToys для протокола. Доступ к ним осуществляется по нажатию на полосу прокрутки „Protocol“, когда отображается „Flysky“:
V9x9: Включает расширения для квадрокоптеров WLToys V939, V949, V959, v969 и т.п.
- Свет управляется каналом 5
- Видео управляется каналом 6
- Камера управляется каналом 7
- Флип (сальто) управляется каналом 8
V6x6: Включает расширения для квадрокоптеров WLToys V636 и V686.
- Свет управляется каналом 5
- Флип (сальто) управляется каналом 6
- Камера управляется каналом 7
- Видео управляется каналом 8
- Режим „Headless“ управляется каналом 9
- Режим „RTH“ управляется каналом 10
- Калибровка X и Y управляется каналами 11 и 12, соответственно.
V912: Включает расширения для вертолетов V912, V913 и V915.
Имейте в виду, что если эти каналы назначены на переключатель, включение переключателя включает состояние, в возврат переключателя не оказывает влияния. Таким образом, чтобы включить свет, включите переключатель назначенный на канал 5. Выключение этого переключателя не оказывает влияния. Повторное включение переключателя выключает свет.
9.10. Протокол: *AFHDS-2A¶
Протокол AFHDS-2A используется для управления приемниками Turnigy/Flysky AFHDS 2A. NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол AFHDS-2A поддерживает до 14 каналов, и требует привязки вручную. Приемник должен быть однократно привязан с использованием кнопки ‘Bind’, после чего он остается привязанным.
Параметры, настраиваемые на странице протокола AFHDS-2A:
- Outputs: Устанавливает желаемый тип выходов приемника, PWM+IBUS, PPM+IBUS, PWM+SBUS или PPM+SUBS
- Servo Hz: Устанавливает частоту обновления PWM между 50 Hz и 400 Hz
- LQI output: Вывод LQI в выбранный канал
- Freq-fine: Регулировка смещения частоты. Диапазон от -300 до 300. Регулируется для различия между модулями A7105. По умолчанию 0. Значение телеметрии LQI может быть использовано как руководство для регулировки смещения частоты.
Поддерживается телеметрия.
9.11. Протокол: *Hubsan4¶
Этот протокол используется в квадрокоптерах Hubsan-X4 серии H107, вертолетах H111, H101, H102, H201, H202 и Estes Proto X (но не Proto X SLT) (обычный формат).
Этот протокол используется в Hubsan H301F, H302F, H303F и H304F (формат H301).
Этот протоко используется в Hubsan H501S, H122D и H123D (формат H501).
NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Протокол Hubsan4 поддерживает до 13 каналов, обычный формат поддерживает только автоматическую привязку. Может быть использован Fixed ID, но это не предотвращает автоматическую привязку во время включения питания.Первые 4 канала это Aileron, Elevator, Throttle и Rudder. Дополнительные каналы управляют специальными функциями квадрокоптера:
С форматами H301 и H501 необходимо вручную привязать каждую модель перед первым использованием.
- Канал 5 управляет индикаторами (LED)
- Канал 6 включает режим ‘flip’ или altitude hold или stabilized mode, в зависимости от формата.
- Канал 7 включае/выключает видео (H102) или делает снимок
- Канал 8 делает снимок
- Канал 9 включает режим «headless»
- Каанал 10 включает возврат домой (return to home)
- Канал 11 включает «GPS hold»
- Каанал 12 устанавливает режим Sport 1, Sport 2 или Acro (H123D)
- Канал 13 включает режим ‘flip’ (H122D)
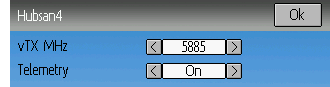
Параметры, настраиваемые на странице протокола „Hubsan“:
- vTX MHz: Определяет частоту используемую видео-передатчиком Hubsan H107D (требует наличия приемника 5.8GHz для приема и отображения видео).
- Telemetry: Включает передачу телеметрии напряжения приемника.
- Freq-fine: регулировка смещения частоты. Диапазон от -300 до 300. Регулировка для компенсации различия между модулями A7105. По умолчанию 0.
9.12. Протокол: *Joysway¶
Протокол Joysway поддерживает модель яхты Joysway Caribbean, и приемник J4C12R, используемый в моделях яхт Joysway Orion, Explorer, Dragon Force 65 и в катамаране Force2 60. Другие модели не тестировались с этим протоколом, включая воздушную версию J4C12R. NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол Joysway поддерживает до 4 каналов, и не поддерживает автоматической привязки, но будет привязываться, когда приемник запрашивает привязку. Если „Fixed ID“ установлен в „None“, вместо него используется идентификатор передатчика. Перед первым использованием необходимо вручную привязать каждый приемник.
Первый канал обычно управляет парусами, а второй канал рулем, но это может варьироваться от модели к модели.
9.13. Протокол: *Bugs3¶
Протокол «Bugs3» используется для управления MJX Bugs3 и Bugs8. NOTE: This protocol requires the addition of an ‘A7105’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Для привзки сначала выберите протокол bugs3 и нажмите Bind. Затем включите питание модели. Диалог привязки исчезнет, если привязка успешна. Идентификатор (ID) модели сохраняется в поле Fixed ID модели. Не изменяйте это значение.
Каналы используются для управления функциями. Установите значение канала большее, чем ноль, для активации.
- Включение (Arm) управляется каналом 5
- Индикация управляется каналом 6
- Кувырки (flip) управляется каналом 7
- Камера управляется каналом 8
- Видео управляется каналом 9
- Режим Angle/Acro управляется каналом 10 ( >0 это Angle)
Телеметрия поддерживается для RSSI и сигнала напряжения. Она использует экран телеметрии Frsky с отображением силы сигнала в поле RSSI и напряжение батареии в поле VOLT1. Приемник bugs3 сообщает только о хорошем/плохом напряжении. Это транслируется в значения VOLT1 8.4V для хорошего и 6.0V для низкого напряжения.
9.14. Протокол: *Frsky-V8¶
Протокол Frsky-V8 используется для управления старыми приемниками Frsky™, использующими односторонний протокол. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол Frsky-V8 поддерживает 8 каналов, и не поддерживает автоматической привязки. Если „Fixed ID“ установлен в „None“, вместо него используется идентификатор передатчика. Перед первым использованием необходимо вручную привязать каждый приемник.
9.15. Протокол: *Frsky¶
Протокол Frsky используется для управления новыми приемниками Frsky™ (с телеметрией), с использованием двухстороннего протокола (D8). NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол Frsky поддерживает до 8 каналов, и не поддерживает автоматической привязки. Если „Fixed ID“ установлен в „None“, вместо него используется идентификатор передатчика. Перед первым использованием необходимо вручную привязать каждый приемник.
Протокол Frsky также поддерживает включение/отключение телеметрии. Эта опция доступна по нажатию на полосу прокрутки „Protocol“, когда отображается „Frsky“.
Когда телеметрия включена, поддерживаются значения (RSSI, VOLT1, VOLT2), посылаемые приемником.
Дополнительные значения телеметрии „Hub“ поддерживаются совместно с протоколом FrskyX, кроме передатчиков Devo 7e и Devo F7. Смотрите ниже раздел „Телеметрия Frsky“.
9.16. Протокол: *FrskyX¶
Протокол FryskyX реализует протокол Frsky D16, включая телеметрию S.Port и hub.
NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Этот протокол поддерживает до 16 каналов. Для привязки передатчика к конкретному приемнику используется Fixed ID. Для всех передатчиков поддерживается телеметрия приемника (RSSI, VOLT1). Поддерживаются датчики телеметрии S.Port и hub, а также GPS телеметрия (за исключением devo 7e и F-серии), как описано в следующем разделе.
Доступны следующие параметры протокола:
Freq-fine: Регулировка смещения частоты. Диапазон от -127 до 127. Для настройки отклонений между модулями CC2500. Обычно требуется смещение 0 или -41, но необходимо проверить весь диапазон, если имеются проблемы с привязкой или диапазоном действия. По умолчанию 0. Значение телеметрии LQI может быть использовано как руководства для настройки опции протокола „Freq-fine“.
AD2GAIN: Значение телеметрии VOLT2 (вход AIN в приемнике X4R) умножается на это значение, деленное на 100. Позволяет настроиться на внешний резистивный делитель напряжения. По умолчанию 100 (усиление 1). Диапазон от 1 до 2000 (усиление от 0,01 до 20,00).
Failsafe: Полностью поддерживаются опции отказоустойчивости Frsky. Если настроено значение „failsafe“ канала (в настройке канала микшера), это значение посылается в приемник каждые 9 секунд. Приемник будет использовать эти значения в отказоустойчивом режиме, если опция протокола не установлена в „RX“.
Format: Установите формат, соответствующий прошивке в приемнике. Поддерживаются FCC и EU. Версия EU совместима с прошивкой Frsky LBT, но на самом деле не выполняет тест LBT.
RSSIChan: При установке в „LastChan“ принятый RSSI будет передаваться в последнем радиоканале. Последний канал основан на настройке „# of Channels“ в модели. Значение канала - полученное значение RSSI, умноженное на 21.
S.Port Out: При включении, принятые пакеты s.port передаются в порт тренера, а голосовое расширение отключается.
Bind Mode: The bind mode will control which channels will be connected to the receiver PWM outputs and allow to enable or disable the receivers telemetry during bind.
Version: This will switch between FrSkyX V1.x.x and V2.1.x protocol version.
Для каналов с „failsafe“ установленным в „off“, опция отказоустойчивости протокола по умолчанию «Hold» командует приемнику удерживать последнее принятое значение, когда приемник переходит в безопасный режим. Настройка «NoPulse» заставляет приемник не посылать какой-либо сигнал на выходы PPM (тестирование X8R показало, что значения SBUS переходят в минимум, но поведение SBUS не определено в протоколе). Настройка «RX» предотвращает отправку отказоустойчивых значений, чтобы приемник использовал отказоустойчивые значения сохраненные в приемнике.
Когда „S.Port Out“ включен и „PPMIn“ не используется, полученные пакеты S.Port посылаются в порт тренера. Битовая скорость составляет 57600 для совместимости с декодерами S.Port, но сигнал должен быть инвертирован для подключения к стандартному декодеру. Он может может быть непосредственно подключен ко входу адаптера 3.3V ftdi.
9.17. Расширенная телеметрия Frsky и FrskyX¶
Расширенная телеметрия относится к датчикам телеметрии Frsky „hub“ и „S.Port“. Эти датчики поддерживаются во всех передатчиках, кроме Devo 7e. Они доступны на странице телеметрии и на экранах главной страницы.
Телеметрия FrskyX S.Port обеспечивает подключение до 16 датчиков одного типа (например, напряжение батареи). Deviation поддерживает несколько датчиков одного типа, но сохраняется только одно значение телеметрии. Сообщается о последнем значении, полученном от всех датчиков одного типа.
Значения телеметрии сбрасываются долгим нажатием на кнопку «Up» на странице монитора телеметрии. Для телеметрии Frsky это сбрасывает «уровень земли» высоты вариометра к следующему полученному значению телеметрии, что обнуляет значение телеметрии высоты вариометра. Это также сбрасывает аккумулятор разряда и минимальное напряжение банок. Значение уровня земли сохраняется в файле модели для сохранения значения в циклах выключения/включения передатчика - это значение достаточно стабильное в течение дня полетов в тихую погоду.
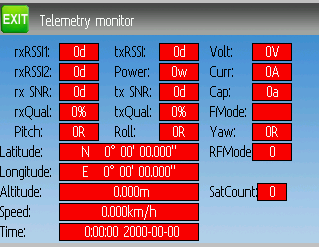
Страница телеметрии

Напряжения банок помечены C1-C5.
Значение ALTITUDE указано над уровнем земли. Уровень земли устанавливается в первое полученное значение высоты по телеметрии.
LQI (индикатор качества сигнала) и LRSSI (Local RSSI) указывают качество и уровень сигнала телеметрии полученного от приемника. LQI может быть использован в качестве руководства для настройки опции протокола для точной подстройки частоты. Более низкий LQI является лучшим и обычно значение меньше 50. Единицы измерения LRSSI (примерно) dBm.
Производные значения: MINCELL - это минимальное значение CELL. ALLCELL - это сумма всех значений CELL. „Discharge“ - это величина разряда батареи в mAh.
9.18. Протокол: *Skyartec¶
Протокол Skyartec используется для управления приемниками и моделями Skyartec™. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол Skyartec поддерживает до 7 каналов, и не поддерживает автоматическую привязку. Если „Fixed ID“ установлен в „None“, вместо него используется идентификатор передатчика. Перед первым использованием необходимо вручную привязать каждый приемник.
9.19. Протокол: *Futaba S-FHSS¶
Протокол Futaba S-FHSS используется для управления приемниками и моделями Futaba™. Он также используется некоторыми моделями „XK Innovations“ и сторонними совместимыми приемниками. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол S-FHSS поддерживает до 8 каналов, и поддерживает только автоматическую привязку. Если „Fixed ID“ установлен в „None“, вместо него используется идентификатор передатчика. Перед первым использованием необходимо вручную привязать каждый приемник.
Традиционная схема каналов Futaba следующая: Aileron, Elevator, Throttle, Rudder, Gear, Pitch, Aux1 и Aux2. Таким образом, он подходит для управления вертолетами с коллективным шагом.
Разрешение протокола составляет 1024 шага (10 бит), из которых фактически используется меньший диапазон (данные получены с использованием совместимого оборудования). Период обновления 6.8ms. Телеметрия не поддерживается.
9.20. Протокол: *Corona¶
Протокол Corona поддерживает приемники Corona V1 и V2, а также приемники Flydream V3. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Все протоколы поддерживают до 8 каналов. Порядок каналов по умолчанию AETR. Протоколы не поддерживают телеметрию.
Доступны следующие параметры протокола:
Format: выбор протокола. Используйте V1 и V2 с приемниками Corona. Используйте FDV3 для Flydream V3.
Freq-fine: Настройка смещения частоты. Диапазон от-127 до 127. Настройка для компенсации различий между модулями CC2500. Обычно требуется смещение 0 или -41, но должен быть протестирован весь диапазон, если имеются проблемы с привязкой или диапазоном действия. По умолчанию 0.
9.21. Протокол: *Hitec¶
Протокол Hitec поддерживает приемники Optima и Minima. NOTE: This protocol requires the addition of an ‘CC2500’ hardware module to function. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Протокол поддерживает до 9 каналов. По умолчания порядок каналов AETR. Телеметрия поддерживается с использованием схемы телеметрии Frsky. Поддерживаются следующие значения: VOLT1, VOLT2, CURRENT, TEMP1, TEMP2, FUEL, RPM, LRSSI, LQI и GPS (latitude, longitude, altitude, speed, heading). В этом протоколе RSSI недоступно.
Доступны следующие параметры протокола:
Format: Выбор приемника Optima или Minima.
Freq-fine: Настройка смещения частоты. Диапазон от-127 до 127. Настройка для компенсации различий между модулями CC2500. Обычно требуется смещение 0 или -41, но должен быть протестирован весь диапазон, если имеются проблемы с привязкой или диапазоном действия. По умолчанию 0.
9.22. Протокол: *V202¶
Протокол V202 поддерживает квадрокоптер WLToys V202. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол V202 поддерживает до 12 каналов, и не поддерживает автоматическую привязку. Если Fixed ID установлен в None, вместо него используется ID передатчика. Необходимо вручную привязать каждую модель перед первым использованием.
Первые 4 канала представляют Aileron, Elevator, Throttle и Rudder. Дополнительные каналы управляют специальными функциями квадрокоптера:
- Канал 5 управляет скоростью мигания
- Канал 6 включает режим „flip“
- Канал 7 снимает фотографии
- Канал 8 включает/выключает видео
- Канал 9 включает/выключает режим „headless“
- Канал 10 запускает калибровку оси X
- Канал 11 запускает калибровку оси Y
Если выбран формат „JXD-506“, каналы 10-12 используются для:
- Каналl 10 старт/стоп
- Канал 11 аварийная остановка
- Канал 12 управление подвесом
Также, модели совместимые с этим форматом, требуют, чтобы стик газа был отцентрован перед запуском.
9.23. Протокол: *SLT¶
Протокол SLT используется для управления приемниками Tactic SLT/Anylink. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол SLT поддерживает до 6 каналов, и поддерживает только автоматическую привязку. „Fixed ID“ может быть использован, но не мешает автоматической привязке при включении питания.
9.24. Протокол: *HiSky¶
Протокол HiSky используется для управления моделями HiSky и моделями WLToys v922 v955. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол HiSky поддерживает до 7 каналов, и не поддерживает автоматической привязки. Если „Fixed ID“ установлен в „None“, вместо него используется идентификатор передатчика. Перед первым использованием необходимо вручную привязать каждый приемник.
9.25. Протокол: *YD717¶
Протокол YD717 поддерживает мини квадрокоптеры YD717 и Skybotz UFO, а также несколько моделей от Sky Walker, XinXun, Ni Hui и Syma через опции протокола. Смотрите таблицу поддерживаемых моделей для полного списка. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол YD717 поддерживает 9 каналов и только автоматическую привязку. Протокол остается в режиме привязки до ее успешного завершения.
Первые четыре канала представляют Aileron, Elevator, Throttle и Rudder.
Пятый канал позволяет использовать функцию автофлип, когда он больше нуля. Кроме того, чтобы включить автофлип влево и вправо, масштаб канала элеронов должен быть 87 или больше. Аналогично для канала руля высоты и автофлипа вперед/назад. Когда автофлип включен, полное перемещение стика в любом направлении запускает автофлип в этом направлении. YD717 требует не менее четырех секунд между каждым автофлипом.
Шестой канал включает подсветку, когда он больше нуля.
Седьмой канал выполняет снимок при переходе от отрицательного в положительное значение.
Восьмой канал запускает/останавливает запись видео при каждом переходе в положительное значение.
Девятый канал на последнюю функцию доступную в протоколе. Это может управлять режимом „headless“ в моделях, которые имеют такую функцию.
9.26. Протокол: *SymaX¶
Этот протокол используется для моделей Syma: X5C-1, X11, X11C, X12, новый X4 и новый X6. Вариант, поддерживающий оригинальные X5C и X2, включен в опции протокола (Syma X3, старый X4 и старый X6 поддерживаются с опцией SymaX4 в протоколе YD717). Смотрите таблицу поддерживаемых моделей для полного списка. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the «plus» version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол SymaX поддерживает 9 каналов и поддерживает только автоматическую привязку.
Первые четыре канала представляют Aileron, Elevator, Throttle и Rudder.
Пятый канал не используется.
Шестой канал включает функцию автофлип, когда он больше нуля.
Седьмой канал выполняет снимок при переходе от отрицательного в положительное значение.
Восьмой канал запускает/останавливает запись видео при каждом переходе в положительное значение.
Девятый канал включает режим „headless“, когда он больше нуля.
9.27. Протокол: *Hontai¶
Этот протокол используется в моделях Hontai F801 и F803.
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the «plus» version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Первые четыре канала представляют Aileron, Elevator, Throttle и Rudder. Дополнительные каналы управляют специальными функциями:
- Канал 5 не используется
- Канал 6 включает функцию „flip“
- Канал 7 делает снимок при переходе в положительное значение через ноль
- Канал 8 включает/выключает видео при переходе в положительное значение
- Канал 9 включает/выключает режим „headless“
- Канал 10 включает функцию возврата домой
- Канал 11 запускает калибровку
9.28. Протокол: *Bayang¶
Этот протокол используется в BayangToys X6, X7, X8, X9, X16, Boldclash B03, JJRC/Eachine E011, H8, H9D v2, H10, Floureon H101, JJRC JJ850, JFH H601 и H606 (обычный формат).
Этот протокол используется в BayangToys X16 с удержанием высоты (формат X16-AH).
Этот протокол используется в IRDRONE Ghost X5 (формат IRDRONE).
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the «plus» version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Первые четыре канала представляют Aileron, Elevator, Throttle и Rudder. Дополнительные каналы управляют специальными функциями:
- Канал 5 активирует светодиоды или перевернутый полет (Floureon H101)
- Канал 6 включает функцию „flip“
- Канал 7 выполняет снимок при переходе в положительное значение
- Канал 8 включает/выключает видео при переходе в положительное значение
- Канал 9 включает/выключает режим „headless“
- Канал 10 включает функцию возврата домой
- Канал 11 включает взлет/приземление (Take Off/Landing)
- Канал 12 активирует аварийную остановку (emergency stop)
- Channel 13 analog aux channel #1
- Channel 14 analog aux channel #2
NOTE: Channels 13 and 14 are only active when using NFE Silverware firmware (and some other Silverware forks). Two otherwise static bytes in the protocol overridden to add two „analog“ (non-binary) auxiliary channels. The «Analog Aux» Bayang protocol option must be enabled on the TX and the Silverware firmware must have the Analog Aux feature enabled. Mismatches betwen TX and RX settings will prevent binding.
9.29. Протокол: *FY326¶
Этот протокол используется в FY326 (красная плата).
NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the «plus» version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information: http://www.deviationtx.com/wiki/#hardware_modifications
Первые четыре канала представляют Aileron, Elevator, Throttle и Rudder. Дополнительные каналы управляют специальными функциями:
- Канал 5 не используется
- Канал 6 включает функцию „flip“
- Канал 7 не используется
- Канал 8 не используется
- Канал 9 включает/выключает режим „headless“
- Канал 10 включает функцию возврата домой
- Канал 11 запускает калибровку
9.30. Протокол: *CFlie¶
Протокол CFlie используется в квадрокоптере CrazyFlie. Он не тестировался с любыми другими моделями. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the «plus» version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол CFlie поддерживает до 4 каналов, и не поддерживает автоматической привязки. Если „Fixed ID“ установлен в „None“, вместо него используется идентификатор передатчика. Перед первым использованием необходимо вручную привязать каждый приемник.
9.31. Протокол: *H377¶
Протокол H377 поддерживает 6 канальный вертолет NiHui H377. Он не тестировался с другими моделями. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол H377 поддерживает до 7 каналов, и не поддерживает автоматической привязки. Если „Fixed ID“ установлен в „None“, вместо него используется идентификатор передатчика. Перед первым использованием необходимо вручную привязать каждый приемник.
9.32. Протокол: *HM830¶
Протокол HM830 поддерживает самолет HM830 Folding A4 Paper. Он не тестировался с другими моделями. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол HM830 поддерживает 5 каналов, и поддерживает только автоматическую привязку. Протокол остается в режиме привязки до успешного завершения привязки.
9.33. Протокол: *KN¶
Протокол KN используется в моделях WLToys V930, V931, V966, V977 и V988 (формат WLToys), а также Feilun FX067C, FX070C и FX071C (формат Feilun). Он не тестировался с другими моделями. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the «plus» version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол KN поддерживает до 11 каналов, и не поддерживает автоматическую привязку. Если „Fixed ID“ установлен в „None“, вместо него используется идентификатор передатчика. Перед первым использованием необходимо вручную привязать каждый приемник.
Каналы 1-4 - это throttle, aileron, elevator и rudder. Канал 5 активирует встроенные в модель двойные расходы. Канал 6 активирует удержание газа (throttle hold). Канал 7 активирует „idle up“ (только WL Toys V931, V966 и V977). Канал 8 переключает между стабилизацией 6G (по умолчанию) и 3G. Каналы 9-11 являются каналами триммеров для throttle/pitch, elevator и rudder.
9.34. Протокол: *ESky150¶
Протокол ESky150 поддерживает небольшие модели ESky с 2014 года (150, 300, 150X). Он не тестировался с другими моделями. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол Esky150 поддерживает до 7 каналов, и не поддерживает автоматической привязки. Если „Fixed ID“ установлен в „None“, вместо него используется идентификатор передатчика. Перед первым использованием необходимо вручную привязать каждый приемник.
Каналы 1-4 - это throttle, aileron, elevator и rudder. Канал 5 это полетный режим (1 битный переключатель с двумя состояниями). Канал 6 не используется на всех протестированных моделях. Канал 7 - это 2 битный переключатель (4 состояния).
Если у вас 4 канальная модель, важно настроить ее на использование только 4 каналов, в противном случае канал газа будет работать неадекватно.
9.35. Протокол: *Esky¶
Нуждается в доработке. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол Esky поддерживает до 6 каналов, и не поддерживает автоматической привязки. Если „Fixed ID“ установлен в „None“, вместо него используется идентификатор передатчика. Перед первым использованием необходимо вручную привязать каждый приемник.
9.36. Протокол: *BlueFly¶
Протокол BlueFly используется с Blue-Fly HP100. Он не тестировался с другими моделями. NOTE: This protocol requires the addition of an ‘NRF24L01+’ hardware module to function. Note the «plus» version of the nRF device is required to support the 250kbits/s data rate. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол BlueFly поддерживает до 6 каналов, и не поддерживает автоматической привязки. Если „Fixed ID“ установлен в „None“, вместо него используется идентификатор передатчика. Перед первым использованием необходимо вручную привязать каждый приемник.
9.37. Протокол: *CX10¶
Формат CX10 поддерживает квадрокоптер the Cheerson CX10. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол CX10 поддерживает 9 каналов, и поддерживает только автоматическую привязку. Протокол остается в режиме привязки до успешного завершения привязки. Первые четыре канала Aileron, Elevator, Throttle и Rudder.
Канал 5 - это расход (Rate), за исключением CX-10A, где это режим „headless“.
Канал 6 - это функция „flip“.
Формат DM007 также использует канал 7 для снимков, канал 8 для видеокамеры и канал 9 для режима „headless“.
Протокол имеет опцию формата для квадрокоптеров Blue-A, Green, DM007, Q282, JC3015-1, JC3015-2, MK33041 и Q242.
9.38. Протокол: *CG023¶
Протокол CG023 поддерживает квадрокоптеры Eachine CG023 и 3D X4. Он не тестировался с другими моделями. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол CG023 поддерживает 9 каналов, и поддерживает только автоматическую привязку.
Первые четыре канала Aileron, Elevator, Throttle и Rudder.
Канал 5 управляет светодиодами.
Канал 6 управляет функцией „Flip“.
Каанал 7 управляет фотоснимками.
Канал 8 управляет видеокамерой.
Канал 9 управляет режимом „headless“.
Протокол имеет опцию формата для квадрокоптера YD829.
9.39. Протокол: *H8_3D¶
Протокол H8_3D поддерживает квадрокоптеры Eachine H8 3D, JJRC H20 и H11D. Он не тестировался с другими моделями. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол H8_3D поддерживает 11 каналов, и поддерживает только автоматическую привязку.
Первые четыре канала Aileron, Elevator, Throttle и Rudder.
Канал 5 управляет светодиодами.
Канал 6 управляет функцией „Flip“.
Каанал 7 управляет фотоснимками.
Канал 8 управляет видеокамерой.
Канал 9 управляет режимом „headless“.
Канал 10 управляет режимом возврата домой (RTH).
Канал 11 управляет подвесом камеры в H11D и имеет 3 положения.
Оба стика внизу слева запускают калибровку акселерометра в H8 3D, или калибровку „headless“ в H20.
Оба стика внизу справа запускают калибровку акселерометра в H20 и H11D.
9.40. Протокол: *MJXq¶
Протокол MJXq поддерживает квадрокоптеры MJX. Он также имеет опцию формата для Weilihua WLH08, EAchine E010 и JJRC H26D / H26WH. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол MJXq поддерживает 12 каналов, и поддерживает только автоматическую привязку.
Первые четыре канала Aileron, Elevator, Throttle и Rudder.
Канал 5 управляет светодиодами, или взводит квадрокоптер (arm), если выбран формат H26WH.
Канал 6 управляет функцией „Flip“.
Каанал 7 управляет фотоснимками.
Канал 8 управляет видеокамерой.
Канал 9 управляет режимом „headless“.
Канал 10 управляет режимом возврата домой (RTH).
Канал 11 управляет авто-флипом форматы (X600 и X800) или поворотом камеры.
Канал 12 управляет наклоном камеры.
9.41. Протокол: *Bugs3Mini¶
Протокол Bugs3Mini используется для управления авиамоделями MJX Bugs3 Mini и Bugs 3H. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
Для привязки выберите протокол Bugs3Mini и нажмите Bind. Затем включите питание авиамодели. Диалог привязки исчезнет, если привязка прошла успешно.
Каналы используются для управления функциями. Установите значение канала большее, чем ноль, для активации.
- Включение (Arm) управляется каналом 5
- Индикация управляется каналом 6
- Кувырки (flip) управляется каналом 7
- Камера управляется каналом 8
- Видео управляется каналом 9
- Режим Angle/Acro управляется каналом 10 ( >0 это Angle)
Телеметрия поддерживается для RSSI и сигнала напряжения. Она использует экран телеметрии Frsky с отображением уровня сигнала в поле RSSI и напряжения батареи в поле VOLT1. Приемник Bugs3 Mini сигнализирует только хорошее/предупреждение/низкое напряжение. Это транслируется в значения VOLT1 8.40V для хорошего, 7.10V для предупреждения и 6.40V для низкого напряжения.
9.42. Протокол: *E012¶
Протокол E012 используется для управления квадрокоптером Eachine E012. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол E012 поддерживает 10 каналов и поддерживает только автоматическую привязку.
Первые четыре канала Aileron, Elevator, Throttle и Rudder.
- Флип (сальто) управляется каналом 6
- Режим „Headless“ управляется каналом 9
- Режим „RTH“ управляется каналом 10
9.43. Протокол: *E015¶
Протокол E015 используется для управления квадрокоптером/автомоделью/катером Eachine E015. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол E015 поддерживает 10 каналов и поддерживает только автоматическую привязку.
Первые четыре канала Aileron, Elevator, Throttle и Rudder.
- Включение (Arm) управляется каналом 5
- Световая индикация управляется каналом 6
- Кувырки (flip) управляется каналом 7
- Режим „Headless“ управляется каналом 9
- Режим „RTH“ управляется каналом 10
9.44. Протокол: *NCC1701¶
Протокол NCC1701 используется для управления квадрокоптером Air Hog Star Strek NCC-1701. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол NCC1701 поддерживает 5 каналов и поддерживает только автоматическую привязку.
Первые четыре канала Aileron, Elevator, Throttle и Rudder.
- Warp управляется каналом 5
9.45. Протокол: *V911S¶
Протокол V911S используется для управления вертолетом WL Toys V911-S. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протокол V911S поддерживает 5 каналов. Приемник долженн быть однократно привязан вручную с использованием кнопки ‘Bind’, после чего он остается привязанным.
Первые четыре канала Aileron, Elevator, Throttle и Rudder.
- Калибровка управляется каналом 5
9.46. Протокол: *GD00X¶
Протокол GD00X используется для управления транспортом C17 C-17 Transport и самолетом GD006 Diamond DA62. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
Протоко GD00X поддерживает 5 каналов и поддерживает только автоматическую привязку.
Первые четыре канала это Aileron, Elevator, Throttle и Rudder. Моделью используется только каналы газа и элеронов.
- Свет управляется каналом 5
9.47. Protocol: *LOLI¶
The LOLI protocol is used to control popular DIY nRF24L01 receivers. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The LOLI protocol supports 8 channels. The receiver must be bound manually one-time using the ‘Bind’ button, after which it should stay bound.
Receiver output modes are configurable via protocol options.
Первые четыре канала Aileron, Elevator, Throttle и Rudder.
Failsafe settings are supported.
Поддерживается телеметрия.
9.48. Protocol: *E016H¶
The E016H protocol is used to control the Eachine E016H quadcopter. NOTE: This protocol requires the addition of an ‘NRF24L01’ hardware module to function. See the following document for more information:
http://www.deviationtx.com/wiki/#hardware_modifications
The E016H protocol supports 8 channels and only supports auto binding.
Первые четыре канала Aileron, Elevator, Throttle и Rudder.
- Flips are controlled by Channel 5
- Headless mode is controlled by Channel 6
- RTH mode (One Key Return) is controlled by Channel 7
- Emergency stop is controlled by Channel 8
9.49. Протокол: PPM¶
Протокол PPM используется для вывода PPM в порт тренера. Он отключает передачу радиосигнала. PPM полезен для подключения к симуляторам, или другим радиомодулям, которые подключаются к порту тренера. „Fixed ID“ не действует, и нет привязки связанной с этим протоколом.
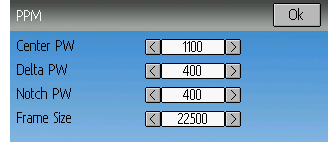
Параметры, настраиваемые на странице PPM:
- Center PW: Определяет время (в мксек) импульса, который передатчик передает для представления центрованного положения сервопривода. Если это число не соответствует ведущему (master) передатчику, сервоприводы не будут отцентрованы.
- Delta PW: Определяет ширину импульса (измеренную от центра) посылаемого передатчиком для определения максимального расхода сервопривода. Если это значение неверно, сервоприводы не будут достигать полного расхода (или расход будет слишком большим).
- Notch PW: Определяет задержку между каналами.
- Frame Size: Определяет общее время для передачи всех каналов.
- Polarity: Defines the polarity of the signal, Normal is active low.
Deviation не определяет автоматически, когда кабель тренера подключается к передатчику. Для использования Deviation с симулятором (таким как Phoenix), создайте новую модель, назовите ее соответствующим образом и выберите PPM в качестве протокола. Используйте кнопку „Re-Init“ или перезагрузите передатчик для активации PPM.
9.50. Протокол: USBHID¶
Протокол USBHID преобразует передатчик в USB джойстик. Подключение передатчика к компьютеру через кабель USB позволит использовать передатчик в качестве джойстика на компьютере. Это можно использовать для управления любым симулятором, который поддерживает использование джойстика. Может потребоваться некоторая начальная калибровка, которая выполняется через аплет панели управления вашей операционной системы.
9.51. Протокол: SBUS¶
Протокол SBUS посылает последовательные данные через порт тренера передатчика. Внешнее кольцо порта тренера является заземлением. В передатчике T8SG PLUS последовательные данные также имеются на верхнем контакте в отсеке модуля JR. Последовательные данные не инвертированы, поэтому может потребоваться адаптер для некоторого оборудования SBUS. Поддерживается до 16 каналов. Скорость передачи данных 100kbps. Формат данных 8 битов данных, контроль четности, два стоп бита.
9.52. Протокол: CRSF (Crossfire)¶
Протокол CRSF передает последовательные данные протокола Crossfire через порт тренера передатчика. Внешнее кольцо порта тренера является заземлением. В передатчике T8SG PLUS последовательные данные также имеются на верхнем контакте в отсеке модуля JR. Для включения телеметрии вход последовательных данных должен быть подключен к выходу последовательных данных. Для порта тренера, соедините кончик с кольцом 1. В отсеке модуля T8SG соедините верхний контак с нижним. Поддерживается до 16 каналов.
Операции CRSF по привязке и конфигурации пока не поддерживаются. Используйте компьютер для привязки модуля Crossfire и приемника перед использованием с Deviation.
Телеметрия недоступна в передатчиках с ограниченной памятью (7e, F4, F12).
Страница телеметрии
Напряжения банок помечены C1-C5.
9.53. Протокол: PXX¶
Протокол PXX это последовательный интерфейс Frsky к передающим модулям. Главным образом используется для модулей R9M и XJT в отсеке JR передатчика T8SG Plus, но протокол также доступен на последовательном порту других передатчиков.
Up to 16 channels are supported. Telemetry (S.Port) is supported in the Frsky format for most transmitters. Due to memory constraints telemetry is not available in modular builds. Range check operation is supported. Module power setting is displayed as FCC/EU (e.g. 100/25mW).
Fixed ID is supported to link the transmitter with specific receivers. The Fixed ID corresponds to the receiver number in OpenTX to make sharing easier. Values 0 to 63 are valid. Fixed IDs above 63 are truncated to the valid range.
Доступны следующие параметры протокола:
Failsafe: If the channel failsafe (in mixer channel config) is set this value is sent to the receiver every 9 seconds. The receiver will use these values in failsafe mode unless the protocol option is set to RX. For channels with failsafe set to off, the default Failsafe protocol option «Hold» commands the receiver to hold the last received channel values when the receiver enters failsafe mode. The «NoPulse» setting causes the receiver to not send any signal on PPM outputs (Testing on X8R showed SBUS values went to minimum, but SBUS behavior is not specified by the protocol). The «RX» setting prevents Deviation from sending failsafe settings so the receiver will use whatever failsafe values have been stored in the receiver.
Country: Set the country to match the firmware in the receiver. Options are US, JP, EU.
Rx PWM out: Choose whether PWM outputs of receiver are channels 1-8 or 9-16.
Rx Telem: Turn receiver telemetry on or off.
For transmitters without JR module the PXX signal is available on the serial port output. This is normally the trainer jack except for the Devo12. Use a stereo plug. Tip will be the PXX output, and ring is the s.port input. Sleeve is ground.
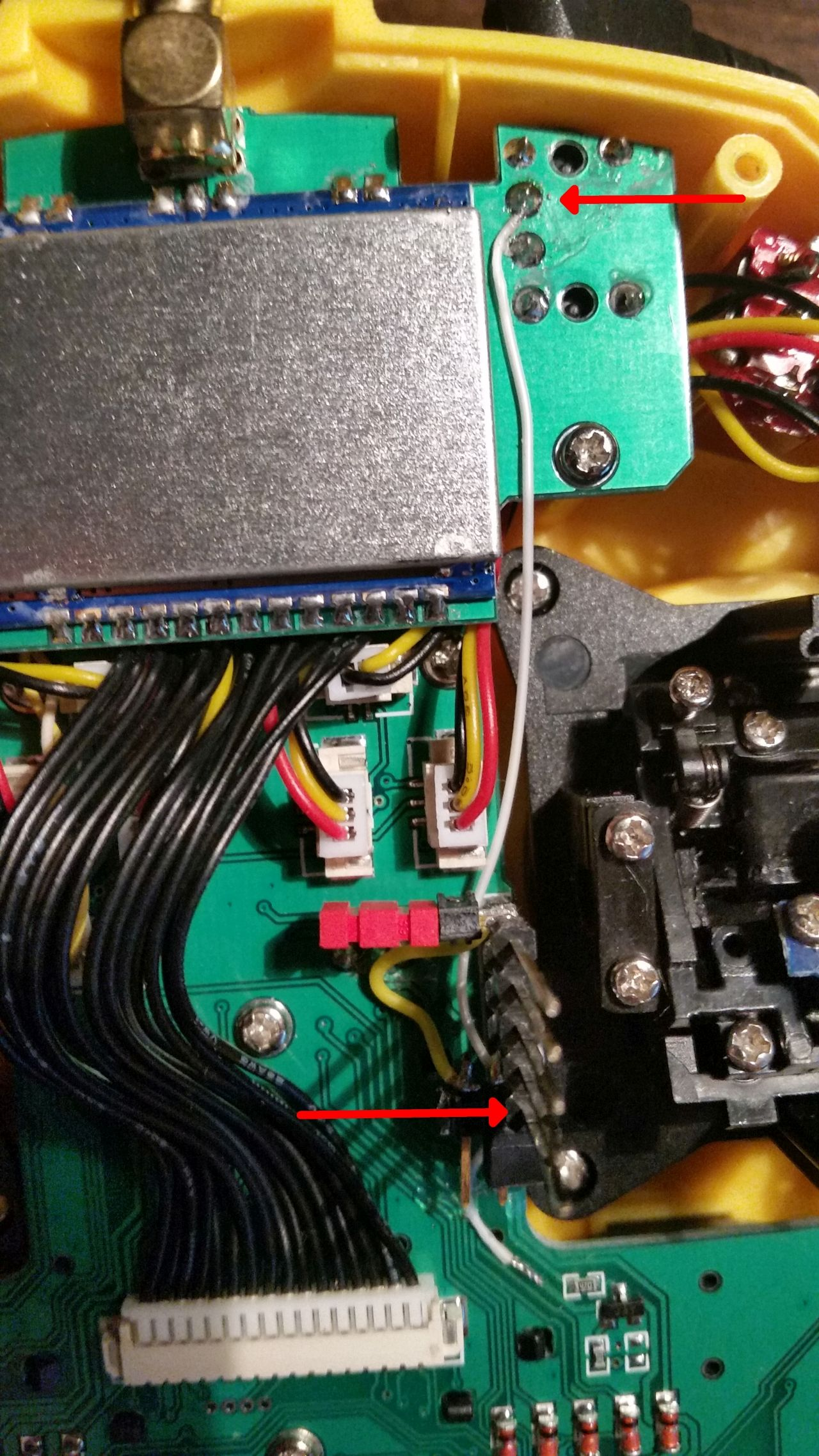
The T8SG V2 Plus requires a hardware modification to receive telemetry from a module in the JR bay. The trainer port ring must be connected to the bottom JR pin (see picture).